
Fターム[3K039FD12]の内容
車両の外部照明装置、信号 (9,386) | 光軸調整遠隔操作(電気式) (569) | 駆動機構 (203) | モータ (114)
Fターム[3K039FD12]の下位に属するFターム
ステッピングモータ (30)
正方向のみ回転するもの
Fターム[3K039FD12]に分類される特許
1 - 20 / 84
車両用前照灯制御装置
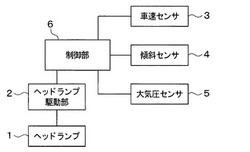
【課題】車体の対路面ピッチ角に応じて光軸方向を制御する技術において、鉛直方向に対して固定された基準面(例えば水平面)に対する車体の傾斜角を検出する傾斜検出手段の出力に基づいて対路面ピッチ角を算出する際、坂道で誤った対路面ピッチ角を算出してしまう可能性を低減することを目的とする。
【解決手段】制御部6は、傾斜検出手段4が検出した絶対ピッチ角と、大気圧センサ5が検出した大気圧の変動量に基づいて、大気圧の変動が少ない場合に、絶対ピッチ角を対路面ピッチ角とする。あるいは、大気圧の変動に基づいて路面勾配を算出し、算出した路面勾配と絶対ピッチ角の差を対路面ピッチ角とする。
(もっと読む)
アクチュエーター及び車輌用前照灯

【課題】 初期位置の検出時間の短縮化及び幻惑光の発生を防止する。
【解決手段】 ランプユニット10に連結される出力軸部41を有し少なくとも出力軸部が前後方向へ移動可能とされると共に水平方向において回動可能とされた連結ユニット34を備え、出力軸部が前後方向へ移動されてランプハウジング2が回動されて光の照射方向の調整動作であるレベリング動作が行われ、出力軸部が水平方向へ回動されてランプハウジングが回動されて光の照射方向の調整動作であるスイブル動作が行われ、磁極の第1の境界52bを検出することにより連結ユニットの前後方向における移動位置を検出する第1の磁気検出部32と、磁極の第2の境界53bを検出することにより連結ユニットの水平方向における回動位置を検出する第2の磁気検出部33とを設け、第1の境界と第2の境界を連結ユニットに設けた。
(もっと読む)
車輌用前照灯及びレベリングアクチュエーターの交換方法
【課題】 小型化及びメンテナンス性の向上を図る。
【解決手段】 第1の固定部28、28と第2の固定部29が設けられ一部が切取可能部24とされたアクチュエーター取付部22を有しランプハウジング2に所定の方向へ傾動自在に支持されたブラケット16と、第1の固定部に固定された状態でアクチュエーター取付部に一方向から取り付けられるレベリングアクチュエーター38と、灯具外筐の内部においてブラケットに所定の方向へ傾動自在に支持されレベリングアクチュエーターの駆動力によってブラケットに対して傾動されるランプユニット7とを設け、切取可能部が切り取られてレベリングアクチュエーターがブラケットから一方向と別の方向へ取り外されたときに、別のレベリングアクチュエーター38Aが第2の固定部に固定されて別の方向からアクチュエーター取付部に取り付けられるようにした。
(もっと読む)
前照灯装置
【課題】前方の車両数が多い場合に、車両位置を適切に管理する前照灯装置を提供すること。
【解決手段】前方車両の存在に応じて配光パターンを変化させることができる前照灯装置100において、前方車両を検出し、近接した複数の前方車両のうち右端及び左端の前方車両の位置のみを推定する前方車両検出手段11と、右端の前方車両が存在する位置から左端の前方車両が存在する位置までの一連の配光領域を除き前方を照明する照明領域制御手段12と、を有することを特徴とする。
(もっと読む)
車両用前照灯
【課題】駆動力伝達機構のラックとピニオンとの間の負荷を小さく維持することができ、かつ、可動リフレクタの停止位置の位置精度を高精度に維持することができること。
【解決手段】この発明は、半導体型光源2U、2Dと、反射面10U、10Dを有する固定リフレクタ3と、反射面12U、12Dを有する可動リフレクタ4U、4Dと、ソレノイド5と、駆動力伝達機構6と、を備える。駆動力伝達機構6は、ラック14と、ピニオン15U、15Dと、から構成されている。ラック14の両端部の歯部17U、17Dの高さH1は、ラック14の中間部の歯部17U、17Dの高さH2と比較して高い。この結果、この発明は、ラック14とピニオン15U、15Dとの間の負荷を小さく維持することができ、かつ、可動リフレクタ4U、4Dの停止位置の位置精度を高精度に維持することができること。
(もっと読む)
車両用灯具の制御装置および車両用灯具システム
【課題】車両の低コスト化を図る技術を提供する。
【解決手段】車両用灯具の制御装置は、傾斜センサの出力値を受信するための受信部102と、傾斜センサの出力値から車両300の傾斜角度を演算する角度演算部1041と、得られた傾斜角度を用いて車両用灯具の光軸調節を指示する制御信号を生成する調節指示部1042と、傾斜センサの出力値、傾斜角度、および傾斜角度の演算過程で生成される中間生成値の少なくとも1つを、車両300に搭載される他のシステムに送信する情報提供部1043と、を備える。
(もっと読む)
車両用前照灯
【課題】駆動力伝達機構のラックとピニオンとの間の負荷を小さく維持することができ、かつ、可動リフレクタの停止位置の位置精度を高精度に維持することができること。
【解決手段】この発明は、半導体型光源2U、2Dと、反射面10U、10Dを有する固定リフレクタ3と、反射面12U、12Dを有する可動リフレクタ4U、4Dと、ソレノイド5と、駆動力伝達機構6と、を備える。駆動力伝達機構6は、弾性変形するラック14と、ピニオン15U、15Dと、から構成されている。この結果、この発明は、ラック14とピニオン15U、15Dとの間の負荷を小さく維持することができ、かつ、可動リフレクタ4U、4Dの停止位置の位置精度を高精度に維持することができること。
(もっと読む)
車載ヘッドランプの光軸制御装置
【課題】車載ヘッドランプの光軸制御装置に関し、光軸補正を行うのに適した走行状態を高い精度で判別する。
【解決手段】車載ヘッドランプ5の光軸角度を上下方向に調整する調整手段6と、車両10の駆動輪に作用する駆動トルクTdを演算する駆動トルク演算手段2aとを備える。また、駆動トルクTdに基づき、車両10が静走行状態であるか又は動走行状態であるかを判別する判別手段3を備える。さらに、判別手段3で車両10が静走行状態であると判別されたときに調整手段6による光軸角度の調整を許可し、動走行状態であると判別されたときに調整を禁止する制御手段4を備える。
(もっと読む)
車載ヘッドランプの光軸制御装置
【課題】車載ヘッドランプの光軸制御装置に関し、光軸補正を行うのに適した走行状態を高い精度で判別する。
【解決手段】車載ヘッドランプ5の光軸角度を上下方向に調整する調整手段6と、駆動輪に作用する駆動トルクTdを演算する駆動トルク演算手段2bと、車両10の走行時の抵抗トルクTrを演算する抵抗トルク演算手段2cとを備える。また、駆動トルクTd及び抵抗トルクTrに基づき、車両が静走行状態であるか又は動走行状態であるかを判別する判別手段3を備える。さらに、判別手段3で車両10が静走行状態であると判別されたときに調整手段6による光軸角度の調整を許可し、動走行状態であると判別されたときに調整を禁止する制御手段4を備える。
(もっと読む)
車両用灯具の制御装置および車両用灯具システム
【課題】加速度センサを用いて車両用灯具の光軸調節を実施するオートレベリング制御の精度を高める技術を提供する。
【解決手段】レベリングECU100は、加速度センサ110で検出される、水平面に対する車両の傾斜角度を導出可能な加速度を受信するための受信部102と、加速度センサ110が車両300に搭載された状態におけるセンサ側の軸と車両側の軸との理想的な位置関係を示す理想軸位置情報を保持するメモリ108と、車両300が所定の基準姿勢にあるとき加速度センサ110で検出される基準加速度を用いてセンサ側の軸と車両側の軸との理想的な位置関係からのずれを算定し、理想軸位置情報を補正する補正部1041と、補正された理想軸位置情報を用いて現在の加速度から車両300の傾斜角度を導出し、光軸調節を実施する調節指示部1042とを有する。
(もっと読む)
ヘッドライトによる照射角度変更制御装置を備えた自動車。
【課題】従来の車は、ヘッドライトを照射し、直進、カ−ブでも曲進方向に対しライトは直進方向のライト照射システムである。ハンドル角度センサ−を備え、進行方向を的確に照射する、ヘッドライトのライト座を備えた、自動車照射角度変更制御装置を提供する。
【解決手段】現在のヘッドライトは1体であるが、ライト反射板、ライト座の2つから成る、ヘッドライトを有し、ライト座駆動モ−タ−にてライト座を曲進方向のみの、照射角度変更装置であり、ハンドルを右、又は左に第1所定角度範囲以上回動すると、ハンドル角度センサ−が働き、カーブ、交差点等曲進方向のライト座制御装置に信号を送る、ライト座制御装置は受信信号を演算、加工してライト座駆動モ−タ−に信号を送りライト座を、曲進方向に第2所定角度範囲内での、照射角度変更制御装置とを具える。
(もっと読む)
車両用灯具の制御装置および車両用灯具システム
【課題】加速度センサを用いて車両用灯具の光軸調節を実施するオートレベリング制御の精度を高める技術を提供する。
【解決手段】レベリングECU100は、加速度センサ110で検出される、路面角度θrと車両姿勢角度θvとを含む合計角度θを導出可能な加速度を受信するための受信部102と、車両用灯具の光軸調節を制御するための制御部104とを備える。制御部104は、合計角度θから、第1計算方法に基づいた第1暫定車両姿勢角度θv1と第2計算方法に基づいた第2暫定車両姿勢角度θv2とを導出し、第1暫定車両姿勢角度θv1および第2暫定車両姿勢角度θv2の一方を他方との差が小さくなるよう補正して、補正された暫定車両姿勢角度を車両姿勢角度θvとし、当該車両姿勢角度θvに応じて車両用灯具の光軸調節を指示する制御信号を出力する。
(もっと読む)
車輌用前照灯
【課題】 小型化を図る。
【解決手段】 開口を有するランプハウジング2とランプハウジングの開口を閉塞するカバー3とによって形成された灯室5に配置されると共にエイミング支点部と二つのエイミング作用部を有しエイミング作用部に対する作用によってエイミング支点部を支点としてランプハウジングに対して水平面内又は垂直面内において傾動されるフレーム21と、駆動制御部40と駆動制御部から突出され駆動制御部の駆動力によって軸方向へ移動される駆動軸41とを有すると共に駆動制御部がフレームに取り付けられて灯室に配置されたレベリングアクチュエーター39と、光源12と軸連結部16と支点用連結部18、18を有しフレームに垂直面内において支点用連結部を支点として傾動可能に支持されると共に軸連結部がレベリングアクチュエーターの駆動軸に連結された灯具ユニット7とを設け、軸連結部と支点用連結部を一体に形成した。
(もっと読む)
車輌用前照灯
【課題】 灯具外筐の内部の密閉性を確保した上で放熱性の向上を図る。
【解決手段】 光源51とリフレクター50とヒートシンク49、49、・・・を有する光源ユニット12と、灯具外筐4の内部において固定された固定フレーム9と、固定フレームに上下方向へ移動自在に支持された可動フレーム8と、投影レンズ14とレンズホルダー13を有し可動フレームに左右方向へ移動自在に支持されたレンズユニット7と、可動フレームを上下方向へ移動させて光軸調整を行う第1のエイミング操作軸10と、レンズユニットを左右方向へ移動させて光軸調整を行う第2のエイミング操作軸11と、リフレクターによって反射される光の焦点から投影レンズまでの距離が一定の状態でレンズユニットが固定フレームに対して左右方向及び上下方向へ移動され、光源ユニットはヒートシンクが灯具外筐の外側に位置された状態でランプハウジングに固定された。
(もっと読む)
アクチュエータ
【課題】 小さな取付スペースで取付可能であると共に、部品点数及び取付工数が少なくて済むアクチュエータを提供することを課題とする。
【解決手段】 車輌の走行状況に応じて照射方向が変化されるランプユニット60の照射方向を水平方向において変化させることが可能な水平駆動手段90と、照射方向を垂直方向において変化させることが可能な垂直駆動手段100とが一体化され、水平駆動手段と垂直駆動手段とが自動車用前照灯10の灯室40内に配置される単一のハウジング81内に設けられる。
(もっと読む)
車輌用前照灯
【課題】 灯具外筐の内部の密閉性を確保した上で放熱性の向上を図る。
【解決手段】 光源から出射される光を反射するリフレクターと光源の駆動時に発生する熱を放出するヒートシンクとを有する光源ユニットと、固定フレームに回動軸を支点として上下方向へ回動自在に支持された可動フレームと、可動フレームに左右方向へ移動自在に支持されたレンズユニットと、レンズユニットを可動フレームに対して左右方向へ移動させて光軸調整を行う第1のエイミング操作軸と、レンズユニットを可動フレームに対して回動軸を支点として回動させて光軸調整を行う第2のエイミング操作軸とを設け、光の焦点から投影レンズまでの距離が一定の状態でレンズユニットが回動軸を支点として回動され、光源ユニットはヒートシンクが灯具外筐の外側に位置された状態でランプハウジングに固定された。
(もっと読む)
車両用前照灯装置
【課題】付加配光パターンの上向きカットオフラインを前方車に合わせるように灯具の光軸方向を調整する車両用前照灯において、前方車検出手段と灯具の取り付け位置が相違することに起因する位置ずれを補正する。
【解決手段】左側灯具および右側灯具は、鉛直線の左側または右側の領域を含むような上向きカットオフラインを有する左側付加配光パターンまたは右側付加配光パターンを選択的に照射可能に構成される。前方車検出部52は、カメラ90で撮像された画像から前方車を検出する。照射方向制御部56は、前方車検出部52により検出された前方車の左端または左端に左側付加配光パターンまたは右側付加配光パターンの上向きカットオフラインの下端を一致させるように、左右の灯具の照射方向を制御する。視差補正部58は、カメラ90と左右の灯具の自車への設置位置が異なることに起因する照射方向のずれを補正する。
(もっと読む)
車輌用前照灯
【課題】 灯具外筐の内部の密閉性を確保した上で放熱性の向上を図る。
【解決手段】 光源43が配置された光源配置部40と光源から出射される光を反射するリフレクター42と光源の駆動時に発生する熱を放出するヒートシンク41、41、・・・とを有する光源ユニット12と、固定フレーム9に回動軸21、21を支点として回動自在に支持された可動フレーム8と、投影レンズ14とレンズホルダー13を有し可動フレームに支持されたレンズユニット7と、左右方向における光軸調整を行う第1のエイミング操作軸10と、上下方向における光軸調整を行う第2のエイミング操作軸11とを設け、光の焦点Fから投影レンズまでの距離が一定の状態でレンズユニットが固定フレームに対して動作され、光源ユニットはヒートシンクが灯具外筐4の外側に位置された状態でランプハウジング2に固定された。
(もっと読む)
前照灯制御装置
【課題】追従スイブル制御を行う前照灯制御装置において、前方車にグレアを与えてしまう可能性を軽減させる技術を提供する。
【解決手段】前照灯制御装置のECUが実行する目標算出処理は、追従スイブル範囲に存在する前方車(対象前方車)を検出すると開始され、部分ハイビームを対象前方車に追従させる場合に、部分ハイビームの遮光部分に対象前方車が含まれるようにするために必要なヘッドランプの回動量(目標スイブル)を算出する(S402〜S404)。そして、対象前方車の検出時における回動機構(モータ)の動作状態を取得し(S401)、この動作状態に基づいて、目標スイブルに対する余裕量を表す制御マージンを設定し(S405)、その制御マージンを加算して目標スイブルを補正することによりヘッドランプの目標位置を決定する。これにより、部分ハイビームにおける遮光部分を精度よく対象前方車の位置に合わせることが可能となる。
(もっと読む)
車両用照明装置
【課題】反対方向に付勢された光学可動板をモータによって移動させ、モータに供給する保持電流によって該光学可動板を定位置に保持させるものにあって、たとえ車両の電源環境が変動しても、前記保持電流の低下を防止できる車両用照明装置を提供する。
【解決手段】光源と、この光源の光路内の第1位置および光路外の第2位置の間を可動し得る光学可動板と、この光学可動板を第1位置側へ付勢させる付勢手段と、前記光学可動板を第1位置から第2位置へ移動させるモータと、電源に接続され前記モータを駆動させる駆動回路とを備える。駆動回路は、この駆動回路への電源投入時から所定時間、モータに起動電流を流す起動タイマ回路と、モータの駆動時に、付勢手段の付勢力に抗した第2位置への保持のための保持電流を流すとともに、駆動回路に印加される入力電圧の低下の検出によって保持電流の電流値を増大させる低入力時出力増大回路を備えて構成される。
(もっと読む)
1 - 20 / 84
[ Back to top ]