
Fターム[4C038VB34]の内容
生体の呼吸・聴力・形態・血液特性等の測定 (31,718) | 測定対象 (4,537) | 筋電位 (27)
Fターム[4C038VB34]に分類される特許
21 - 27 / 27
内耳前庭の刺激装置
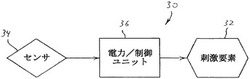
【課題】平衡感覚に関連する迷路部分及び/又はそれに関連する神経を刺激して、患者の呼吸機能を増大させ又は制御し、患者の気道を開放状態に維持し、睡眠を誘導し及び/又は目眩を防止する機能の少なくともつを実行する装置及び方法を提供する。
【解決手段】前庭刺激装置30は、1)組織の実際の刺激を実行する刺激要素32、2)患者の生理学的状態を検出するセンサ34、及び3)センサから供給される信号を受信して適当なタイミング、レベル、パターン及び/又は周波数で刺激要素に刺激エネルギし、所望の機能を達成する動力/制御ユニット36とを備える。本発明は、所定のパターンの刺激を患者に印加するためにセンサを省略することも企図する。
(もっと読む)
モデリング装置、プログラム、及びコンピュータ読み取り可能な記録媒体、並びに対応付け方法

【課題】 複雑な形状を有する物体であっても、或る物体から得られた特性情報を形状が異なる他の物体に容易に射影できるモデリング装置を実現する。
【解決手段】 本発明のモデリング装置1は、心臓に対して所定の電圧を印加した際の、心臓内の任意の位置における電位を求める仮想通電部12と、入力部10から入力された形状情報に基づいて形成された心臓モデルに対して、繊維方向を射影する射影部13とを備えている。ここで、射影部13は、射影先となる位置を、仮想通電部12によって求められた電位に基づいて特定する。このように位置特定に電位を用いることにより、形状が複雑で、かつ、形状が様々な心臓に対して、繊維方向を容易に射影することができる。
(もっと読む)
呼吸障害の検知
呼吸障害を検知する装置および方法が、患者が睡眠中であることを判定すること、および患者が睡眠中に、睡眠時呼吸障害を示す1または複数の信号を感知することを含む。睡眠時呼吸障害に関連した感知信号を用いて、睡眠時呼吸障害が検知される。呼吸障害に関連した感知信号はまた、1または複数の呼吸サイクルの呼吸パターンを取得するためにも用いられうる。呼吸パターンの特徴が判定される。呼吸パターンの特徴に基づいて、呼吸パターンが呼吸障害症状として分類される。呼吸障害の検知に含まれる1または複数の処理が、埋め込み型の装置を用いて行われる。 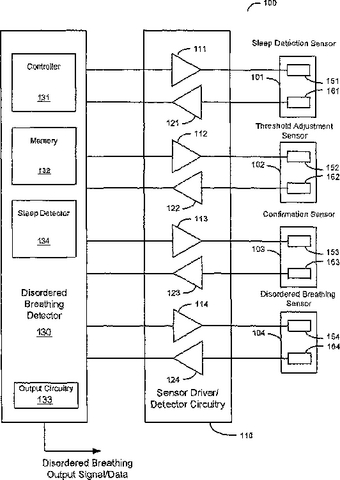 (もっと読む)
(もっと読む)
生体等多変量時系列データ評価法及び装置
【課題】生体または生体の活動に関連するシステムの機能を定量的かつ客観的に評価するために、システムの要素としての複数現象時系列の相互の関係を把握し、その関係からシステムの自由度、システム内の要素の協調性ならびにその安定性を定量的に把握する汎用的な方法を提供する。
【解決手段】複数の周期的生体信号時間的時系列データを用いて、単位周期毎に計算した時系列データ間の相関係数を相関行列として計算し、相関行列の成分毎に複数周期期間の平均値と標準偏差、及び相関行列平均値行列の固有値を計算する。この相関行列の各要素の平均値の行列が協調パタン、相関行列の各要素の標準偏差の行列が協調安定度、1以上の固有値の数が協調自由度を表す。これにより、生体システム等における機能の協調特性やその時間的変化様態を判定することができる。
(もっと読む)
運動測定方法、運動測定装置及び運動測定プログラム
【課題】関節のトルク等、動物の運動に応じて変動する変数を、当該動物の一連の運動の中で正確に測定し得る方法、システム及びプログラムを提供する。
【解決手段】まず、筋電位と、逆動力学モデルを用いて測定された膝関節トルク(変数)とに基づき、筋電位及び膝関節トルクの関係を表す基準関係式が設定される。そして、その測定された筋電位に基づき、且つ、当該基準関係式に従って膝関節トルクが測定される。例えば、動物が第1及び第2運動を連続的にする場合、まず、第1運動時に測定された筋電位及び第1運動に応じた膝関節トルクに基づいて基準関係式が設定される。そして、第2運動時に測定された筋電位に基づき当該基準関係式に従って第2運動に応じた膝関節トルクが測定される。第1及び第2の運動は任意であり、動物は一定の運動を強要されることはない。
(もっと読む)
患者の肢筋挙動の監視に適応された医療装置
本発明は患者の肢筋挙動を監視するための医療装置であって、前記肢が脚、腕又は首に相当し、前記医療装置が下記のものを含む医療装置に関する:−肢の第一部分(脚、腕又は首)を肢の第二部分(足、前脚、前腕、手(2)又は頭)に対応して受けるように適応された移動装置(1)であって、移動装置(1)が少なくとも一つの自由度を与え、それに従って移動装置(1)が移動することができる移動装置(1);−肢の第一部分(脚、腕又は首)をそれぞれ肢の第二部分(前脚、上脚、上腕、前腕(5)又は首)に対応して受け、移動装置(1)の動きに対する前記第二部分の機械的反応をアナログ信号の形で測定するように適応された触覚装置(6);−肢(脚、腕、又は首のそれぞれ)の筋の電気的活性をアナログ信号の形で測定することができる一組の筋電電極(4);−筋電電極及び触覚装置(6)からアナログ信号を取得し、前記アナログ信号をデジタル信号に変換することができるアナログ信号取得装置(9);−前記デジタル信号を処理し、移動装置(1)を制御できる制御器(8)。 (もっと読む)
哺乳動物に加わる負担および/または負荷を監視するための装置および方法
脊椎哺乳動物の体に加わる負担および/または負荷を監視するための装置を開示する。装置は、慣性系に対する体の位置を測定し、位置を示す第1のデータを提供するための手段であって、加速計などの少なくとも1つの慣性センサを含む、手段(10、11)を含む。装置は、筋肉活動を測定し、前記筋肉活動を示す第2のデータを提供するための手段(12、15〜19)を含む。装置はまた、データを格納するための手段と、データを処理して体に対する負担および/または負荷の程度を提供するための手段とを含む。負担および/または負荷は典型的には哺乳動物の背部に加わる。脊椎哺乳動物の体に加わる負担および/または負荷を監視するための方法も開示する。  (もっと読む)
(もっと読む)
21 - 27 / 27
[ Back to top ]