
Fターム[4C117XB14]の内容
Fターム[4C117XB14]に分類される特許
1 - 13 / 13
読影支援システム及び読影支援方法
【課題】読影結果に基づき読影医の読影の傾向を検出することができ、かつ、読影に際し読影医の傾向に応じたアシストを行うことができる技術を提供する。
【解決手段】病変位置をユーザに入力させ、画像の識別情報、ユーザの識別情報、及び病変位置の情報を含む読影結果情報を生成し、あるユーザに関連付けられた読影結果情報と、該読影結果情報と画像の識別情報が同一かつ読影を行ったユーザの識別情報が異なる読影結果情報と、を比較し、両者で病変の有無の判定結果が異なる判定相違位置を抽出し、前記ユーザの識別情報と、画像種別の情報と、抽出された判定相違位置の情報と、を含む差分情報を生成し、ユーザが読影を行う場合に、そのユーザの識別情報と、読影対象の画像の画像種別の情報と、を取得し、それに関連付けられた差分情報に基づき、その読影対象の画像においてそのユーザが他のユーザと異なる判定を行う傾向があると判定される領域を強調表示する。
(もっと読む)
画像処理装置および方法、並びにプログラム

【課題】より簡単かつ迅速に診断のための診察用動画像を得ることができるようにする。
【解決手段】観察位置検出辞書生成部22乃至観察順序生成辞書生成部24は、任意の医用画像から、注目すべき観察位置や、それらの観察位置の観察すべき順序などを得るための各辞書を生成する。診察用動画像生成部25は、生成された各辞書を用いて、入力された医用画像から、観察位置を検出するとともに、それらの観察位置を観察すべき順序と観察パラメータを特定する。そして、診察用動画像生成部25は、各観察位置が、特定された順序および観察パラメータで表示される診察用動画像を生成する。本発明は、画像処理装置に適用することができる。
(もっと読む)
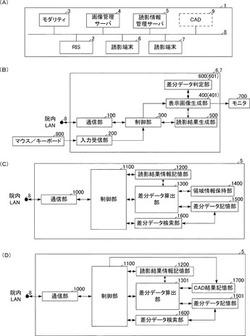
検像装置及び検像システム
【課題】検像専門の技師が撮影専門の技師による撮影評価を把握し得る検像装置又は検像システムを提供する。
【解決手段】オーダ情報d1とオーダ情報d1に基づいて撮影された医用画像d2との整合性をチェックし、医用画像d2の画質が診断において許容範囲内であるか否かチェックするための検像装置3において、外部機器から、オーダ情報d1、医用画像d2及び医用画像d2に基づいて作成された撮影評価に関する情報d3を受信する通信部34と、オーダ情報d1、医用画像d2及び撮影評価に関する情報d3を画面に表示する表示部33と、医用画像d2と撮影評価に関する情報d3とをオーダ情報d1に基づいて対応付けて、対応付けられた医用画像d2及び撮影評価に関する情報d3をオーダ情報d1とともに表示部33に表示させる制御部31と、を備えた検像装置3とする。
(もっと読む)
医療画像記録装置
【課題】短時間かつ簡単な操作で有益な動画を表示または再生することができる医療画像記録装置を提供することにある。
【解決手段】医療用の動画を取得する動画取得部と、医療用の情報を取得する情報取得部と、動画取得部及び情報取得部の少なくとも一方で検出される情報から特徴点を検出する特徴点検出部と、取得した動画及び情報を同期させる同期部と、操作者により入力される動画の再生指示を検出する入力検出部と、入力検出部で前記再生指示が入力されたことを検出したら、特徴点検出部で特徴点を検出した時点を基準として、動画取得部で取得した動画を再生する制御部と、を有することで上記課題を解決する。
(もっと読む)
医療画像記録装置
【課題】短時間かつ簡単な操作で有益な動画を再生することができる医療画像記録装置を提供することにある。
【解決手段】医療用の動画を取得する動画取得部と、医療用の情報を取得する情報取得部と、動画取得部及び前記情報取得部の少なくとも一方で検出される情報から特徴点を検出する特徴点検出部と、取得した動画及び情報を同期させる同期部と、動画及び情報を記憶する記憶部と、同期部により、特徴点検出部で検出した特徴点の情報と取得した動画とを同期つけて、記憶部に記憶させる制御部とを有することで上記課題を解決する。
(もっと読む)
マルチキャスト機能を有するテレプレゼンス・ロボット・システム
ロボットが供給する情報を表示するロボット・ビュー・フィールドと、ロボット情報を受信できる1人または複数のオブザーバに関するオブザーバ情報を表示するオブザーバ・ビュー・フィールドとを含む、遠隔制御ロボット・システム用のグラフィカル・ユーザ・インターフェース。このインターフェースは、マスタ・ユーザがオブザーバの観察および参加を制御できるようになる様々な機能を有している。 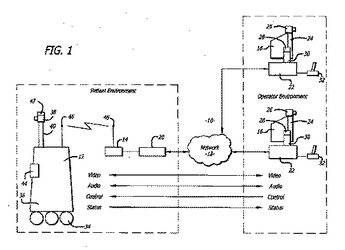 (もっと読む)
(もっと読む)
医用機器の操作支援装置及び操作支援方法
【課題】医用機器の操作トレーニング中に、モニタ画面上に操作部を模したハードウェア画像を表示し、かつ次に操作すべき操作項目が何であるかを識別可能に表示することができる操作支援装置を提供する。
【解決手段】複数の操作部材を有し、該操作部材の操作に応答して医用機器を制御可能な操作部と、医用機器で撮影した画像を表示可能な表示部と、医用機器の操作トレーニングの開始に応答して、操作部を模したハードウェア画像を表示部に表示させるためのハードウェア画像生成部と、操作トレーニング時に操作部材のいずれかが操作されたとき、次に操作すべき操作項目を把握し、ハードウェア画像に次に操作すべき操作部材を案内表示する制御部とを具備する。
(もっと読む)
モダリティ遠隔シミュレータシステムおよびモダリティ遠隔シミュレーション方法
【課題】所有するモダリティのみならず、所有していないモダリティの撮影画像とその撮影画像の処理も遠隔地の端末において行うことができるモダリティ遠隔シミュレータシステムおよびモダリティ遠隔シミュレーション方法を提供する。
【解決手段】モダリティ遠隔シミュレータシステム10は、クライアント端末11とネットワーク12を介して接続されたサーバ13を備え、サーバ13は、あらかじめモダリティおよびそれによる撮影条件に対応する撮影画像を保持している画像ストレージ14と、クライアント端末11からモダリティおよび撮影条件のユーザ指定を受けて、指定された該モダリティおよび該撮影条件に合致する撮影画像を画像ストレージから取得する擬似撮影モジュール19と、擬似撮影モジュール19によって取得された撮影画像に対して解析を行い、条件を基に処理し、その処理過程の画像をクライアント端末へ出力する画像処理・解析モジュール20とを備える。
(もっと読む)
ニューラルネットワーク関連アプリケーションを使用して医療診断テストおよび生化学診断テストを選択する方法
【課題】障害又は状態の診断を支援する重要な変数を識別する。
【解決手段】変数選択のためのコンピュータシステムは、(a)n個の候補変数にてなる第一セットと、最初は空である重要な選択された変数にてなる第二セットとを与える手段と、(b)候補変数を一度に一つずつ取り、重要な選択された変数の現在のセットに結合された変数に基づいて意思決定支援システムをトレーニングすることによって各変数を評価する手段と、(c)候補変数のうち、意思決定支援システムの最高の性能を与える変数である最良の変数を選択し、最良の候補変数が重要な選択された変数の性能と比較して性能を改善する場合、それを重要な選択された変数にてなるセットに追加してそれを候補セットから除去し、最良の候補変数が性能を改善しなくなるまで上記手段(b)を用いた評価を継続する手段を備える。
(もっと読む)
3Dデータセットのネットワーク(”DextroNet”)上での、協同的でインタラクティブな可視化のためシステムおよび方法
本発明は、3Dデータセットのインタラクティブな可視化に関する。特に、ネットワーク上で多数の当事者によって、1以上の3Dデータセットの協同的なインタラクティブな可視化に関する。この示唆されたシステムは、通信リンク上で、1以上のリモート機の1以上のリモートプローブの位置データを受信し、1つのリモートプローブと前記3D画像とを含む組み合わされた3Dシーンを、ローカルディスプレイ上に表示するために作成し、前記装置に対してローカルであるユーザによって、3D画像を処理し、そして、前記通信リンク上で、前記装置に対してローカルである前記ユーザによる前記処理に関連するデータであって、リモート機に3D画像上で処理を行うローカルプローブの画像を含む組み合わされた3次元シーンを表示させるデータを送信するように構成されている。 (もっと読む)
デモ画面を有する生体情報モニタおよびデモ画面を有するセントラルモニタ
【課題】 使い勝手がよく患者を危険に晒すことのないデモ画面を有する生体情報モニタおよびデモ画面を有するセントラルモニタを提供する。
【解決手段】 現在表示しているメニューと操作者が触れた位置の情報とから、デモモードに入るキーが押されたか否かを判定し、デモモードに入るキーが押されていないと判定された場合は他の処理に移り、デモモードに入るキーが押されたと判定された場合は患者ケーブルが接続されているか否かを判定し、患者ケーブルが接続されていると判定された場合は患者ケーブル接続警告メニューのダイアログを表示し、患者ケーブルが接続されていないと判定された場合はデモモードに入り擬似的な波形や数値を表示する。
(もっと読む)
医療用シミュレーションシステム及びそのコンピュータプログラム
【課題】医師が疾患の病態を容易に把握できるようにする。
【解決手段】医療用シミュレーションシステムSSであって、生体の実際の生体応答を示す生体応答情報の入力を受け付ける生体応答入力部W1と、実際の生体応答を模した疑似応答を再現するための生体モデルを生成する生体モデル生成部と、生成された前記生体モデルに基づいて、当該生体の病態の特徴を示す病態特徴情報を取得する病態特徴取得部と、前記生体応答情報と前記病態特徴情報とを共に出力する出力部130と、を備えている。
(もっと読む)
マスター操作子、マスター機および遠隔操作システム
【課題】 スレーブ操作子の回転作業を制御することができるマスター操作子、及び、前記マスター操作子を有するマスター機及び遠隔操作システムを提供すること。
【解決手段】 軸部12と軸受け部13と回転検出装置とを設け、前記回転検出装置は、前記軸部または前記軸受け部が回転した場合に前記回転の回転角を検出して、前記通信ネットワークを介して回転角情報を前記スレーブ機に送信するマスター操作子1とする。
(もっと読む)
1 - 13 / 13
[ Back to top ]