
Fターム[4F035CB13]の内容
噴霧制御装置 (2,732) | 対象物の制御 (373) | 移送経路が直線のもの (119) | 水平方向 (86)
Fターム[4F035CB13]に分類される特許
81 - 86 / 86
作業設備

【課題】 ワークの位置を常に正確に検出することができる作業用ロボットの制御装置を提供すること。
【解決手段】 作業設備Eは、ワークを搬送する搬送装置2と、この搬送装置2により搬送されるワークに対し作業を行う作業ロボット1とを備えている。搬送装置2は、搬送経路を規定するレール29と、ワークの一つに対して複数設定されレール29上を走行するトロリ22と、このトロリ22間を連結する連結バー23と、トロリ22または連結バー23上に固定されワークを位置決めした状態で載置可能な搬送台24と、少なくともトロリ22および連結バー23の移動量Sを検出するセンサ3とを備えている。作業ロボット1は、センサ3で検出したトロリ22および連結バー23の移動量Sに基づき制御されてワークに対し作業を行うように構成されている。
(もっと読む)
被塗装物の位置決め装置

【課題】 保持体に複数種類の被塗装物を確実に位置決め保持可能にし、設備コストを大幅に削減することができ、保持体への被塗装物の位置決め精度の低下を自動的に確実に防止することができる、被塗装物の位置決め装置を提供する。
【解決手段】 ロボット6により、搬送台車3に位置決め保持予定の車体4の種類に応じた受け部11に位置決め受け具12をセットするように位置決め受け具12を着脱し、そのロボット6に設けた力センサ51により、受け部11から位置決め受け具12を取り外すときの操作力を検出し、制御装置9により、力センサ51からの検出信号を受けて位置決め受け具12を含む部位の塗膜付着状態を判定する。
(もっと読む)
塗装治具
【課題】 塗装過程において大型プラスチック成形品を変形させることなく保持することのできる塗装治具を提供する。
【解決手段】 赤外線乾燥炉を備えた塗装装置内で大型プラスチック成形品を吊り下げて保持する塗装治具4であって、この塗装治具4は、熱膨脹による歪み変形が生じない金網6で構成され、この金網6の大型プラスチック成形品の裏面と接する側の面には、ガラスクロス,カーボンクロスの積層面7が一体化されている。また、金網6の表面には、フロン入りの耐熱性塗料の膜が形成されている。
(もっと読む)
エアナイフ装置
【課題】基板などの板状ワークの移動路の幅方向に複数の噴出部を配置して板状ワーク上の液体を気体の噴出により押し流して除去するようにしたエアナイフ装置において、気体使用量の増大を抑えつつ、板状ワークの大形化に対応できるようにし、もって、例えば、液晶表示装置の分野では、大形液晶表示パネルのコスト削減に寄与できるようにする。
【解決手段】複数の噴出部31a〜31cを、板状ワークwの移動路を斜めに横断する方向に沿って略直線状に配列するとともに、板状ワークwの移動方向斜め後側に向かって気体を噴出するようにし、その上で、各噴出部31a〜31cに対する板状ワークwの移動位置に応じて該噴出部31a〜31cの噴出作動を制御部50により制御するようにする。
(もっと読む)
表面塗装装置
本発明は成形品(21)を製造及び塗装する装置に関し、成形機と成形品処理装置を備えている。成形品処理装置は成形品(21)の表面に塗装を施す手段を有する塗装ステーション(30)と、成形品(21)を処理するための少なくとも一つの処理ステーション(31, 32)と、これら各ステーション(30, 31, 32)の間で成形品(21)を移送するテープコンベア(23)とを備える。成形品処理装置は密閉室(22)の内部に配置され、該密閉室(22)は内部に制御された雰囲気を創出する手段(25, 26, 27)を備える。成形機は密閉室(22)の外部に配置される。 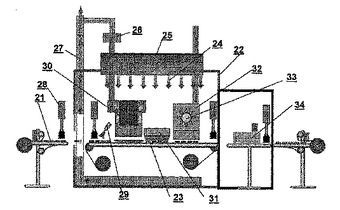 (もっと読む)
(もっと読む)
スプレー塗装装置
コンベヤー2によって移動される円形の対象物の正面/背面16、特に、ホール及びリム4の正面16をスプレー塗装するためのスプレー塗装装置。スプレー装置80,81が、弓形に往復回転可能であり、駆動回転軸線66に対して偏心している。対象物4の駆動回転軸線66及び中心軸線14は互いに一直線である。 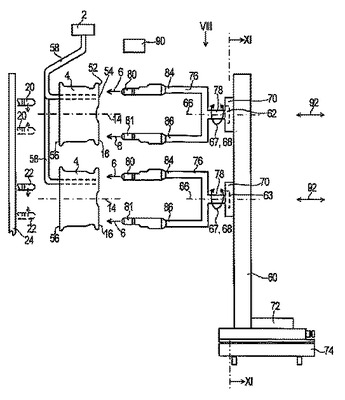 (もっと読む)
(もっと読む)
81 - 86 / 86
[ Back to top ]