
Fターム[5B047CB23]の内容
イメージ入力 (36,078) | 検出、制御信号 (4,349) | 読取画像の分析情報によるもの (2,429) | 認識結果 (2,205) | 位置、傾きの検出 (438)
Fターム[5B047CB23]に分類される特許
421 - 438 / 438
マーカー装置及びそれを備えた画像読取装置

【課題】画像読取装置において、ラインイメージセンサ間の継ぎ目補正を高精度に行うことを目的とする。
【解決手段】副走査方向に伸びる第1の補正用パターンCと、走査面上において、主走査方向の主走査座標に対し副走査座標が一意的に決定し、且つ、各イメージセンサ3の読み取りラインと2点で交わる第2の補正用パターンL、Rと、前記第1の補正用パターンCと前記第2の補正用パターンL、Rとを照射するマーカー照射部50とを有するマーカー装置を備える構成とする。
(もっと読む)
指紋読取方法、指紋読取システム及びプログラム

【課題】 指紋の特徴情報を生成するにあたり、スイープ型指紋センサにて読み取った部分指紋画像の全てを格納し得る広大なバッファメモリ空間が必要とされた。
【解決手段】 スイープ型指紋センサ(20)と、該センサにより読取った部分指紋画像を格納するメモリ(30)と、センサに接続されたプロセッサ(10)とを備える指紋読取システム(101)。プロセッサは、スイープ型指紋センサが読み取った部分指紋画像を逐次的に取得しメモリへ保存する画像取得部(11)と、部分指紋画像の位置情報を算出する位置算出部(12)と、位置情報に基づき所定面積を有する画像領域に対応する無二の単位画像を部分指紋画像から切り出す画像分割部(13)と、単位画像の特徴情報を抽出する特徴抽出部(14)とを有する。
(もっと読む)
駆動素子搭載方法
【課題】駆動素子の複数の端子を液晶表示パネルの接続端子に精度良く搭載する。
【解決手段】駆動素子7をボンディング位置に移動させ、そのアライメントマーク9を含む2つの部分を、定位置に配置された撮像手段29a,29bにより撮像した後、駆動素子7を後退させ、ボンディング位置に表示パネル1を搬入してその位置合わせマーク6を含む2つの部分を前記撮像手段29a,29bにより撮像し、駆動素子7の2つの部分の撮像画像中のアライメントマーク位置と、表示パネル1の2つの部分の撮像画像中の位置合わせマーク位置とを検出して駆動素子7に対する表示パネル1の算出されたずれ量が予め定めた許容値を越えたときに、前記表示パネル1の位置を修正してその2つの部分のずれ量の算出とを繰返し、算出されたずれ量が許容値内であるときに、前記駆動素子7を再びボンディング位置に移動させて表示パネル1にボンディングする。
(もっと読む)
画像構成方法、指紋画像構成装置およびプログラム
【課題】 スイープ型指紋センサ上での指のスライド動作が一定でないときは、指紋の全体画像を構成することが困難であった。
【解決手段】 スイープ型指紋センサが読み取る最新部分画像の既得部分画像に対する差分を求めるための検定領域を、連続する複数の既得部分画像の変位方向に沿って前記既得部分画像に設定し、該既得部分画像に対する前記最新部分画像の重ね合わせ位置の検索範囲を前記検定領域の位置に基づき設定し、前記既得部分画像に対し前記最新部分画像を前記検索範囲にて変位させ、その変位ごとに前記検定領域に係る前記既得部分画像および最新部分画像の差分を求める。さらに、求めた各差分のうちの最小の差分に対応する前記最新部分画像の変位を前記重ね合わせ位置に決定し、前記既得部分画像に対する前記重ね合わせ位置に前記最新部分画像を配置して記憶する。
(もっと読む)
撮像装置、撮像方法、撮像プログラム、撮像プログラムを記録したコンピュータ読取可能な記録媒体
【課題】 複雑で多様な環境下であっても背景の影響を排除した状態で対象物を撮像する。
【解決手段】 ロボット10は、ワーク14を撮像するサブカメラ24と、ワーク14の背景の少なくとも一部を遮蔽する第4指40〜第6指44と、第4指40〜第6指44の少なくとも一部およびサブカメラ24がワーク14を挟んで向き合い、かつサブカメラ24と向き合う第4指40〜第6指44の一部がワーク14と障害物16および障害物18との間に在るように、サブカメラ24および第4指40〜第6指44の配置を制御する制御用コンピュータとを含む。
(もっと読む)
生体情報取得装置および生体情報による認証装置
例えばスウィープ型指紋センサにおいて指をそのセンサ面に対して移動させながら連続的に採取される複数の部分画像から、個人認証等に必要な情報を取得するための装置において、歪みの無い画像を少ないメモリ容量で且つ高速に得られるようにして、高品質な特徴情報による照合を可能にするために、本発明の装置は、生体情報を映像化して複数の部分画像を連続的に採取する画像採取手段(10)と、採取される複数の部分画像のそれぞれから特徴およびその位置を抽出する特徴抽出手段(20)と、採取される複数の部分画像のうちの2以上の部分画像が相互に重なり合う領域に存在する特徴に基づいて、これら2以上の部分画像相互の相対位置を検出する相対位置検出手段(30)と、検出された相対位置と各部分画像における特徴の位置とに基づいて算出された歪み量に基づいて各部分画像における特徴の位置を補正し特徴の相対位置を得る補正手段(40)とをそなえて構成されている。 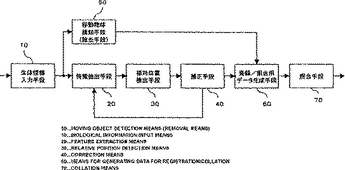 (もっと読む)
(もっと読む)
光学式画像処理方法
【課題】 カメラの結像面に達した処理画像をもれなく電子情報化できる光学式画像処理方法を提供する。
【解決手段】 被処理画像5−1〜5−4を画像表示デバイス3の画像面4の異なる位置にずらせて表示させることにより、処理画像をカメラ13の結像面14の異なる位置に結像させ、これら結像位置が異なるとき得られた複数の電子画像情報15−1〜15−4を蓄積し、これら蓄積した複数の電子画像情報15−1〜15−4からピクセルごとに光強度を選んで最終的な電子画像情報17を得るので、従来はピクセルから外れていた光スポットを検出できる。
(もっと読む)
画像処理装置
【課題】原稿押さえカバーを閉めなくとも、プレスキャン無しで外乱光の影響を受けずに原稿のエッジを検出する。
【解決手段】画像処理装置は、光源1と、光源1を用いて原稿100から画像データを読み取る読取部3と、画像データの読取の期間中に、各々の読取ライン毎に、光源1の光量を通常の読取を行う第1の(通常の)光量又はこれよりも少ない光量である第2の光量のいずれかに変動させる光源制御部2と、光量を変動させつつ読み取った画像データに基づいて原稿100のエッジを検出する検出処理部11と、光量を変動させつつ読み取った画像データを光量の変動に基づいて補正した画像データを得る補正処理部12とを備える。
(もっと読む)
文書に詳細を印刷する方法および装置
本発明は、文書(21)、特にパスポートに詳細を印刷する方法に関し、以下のステップからなる:a)文書(21)の2つの交差する縁(28、29)を第1カメラ(50)で検出するステップ、b)検出された縁(28、29)の位置を用いて、第1詳細(60)がインプリンされる文書(21)の01欄(20)の位置を計算するステップ、c)印刷される01欄(20)にプリントヘッド(45)を位置付けて第1詳細を印刷するステップ、d)文書(21)の図形要素を第2のカメラ(49)で検出するステップ、e)検出された図形要素の位置を用いて印刷される02欄の位置を計算するステップ、f)印刷される02欄にプリントヘッド(45)を位置付けて第2詳細を印刷するステップ。 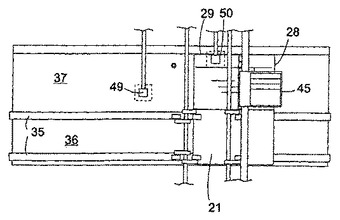 (もっと読む)
(もっと読む)
撮像制御装置及びプログラム
【課題】 エネルギーの浪費を抑制し、常に最適な撮像が可能な撮像制御装置及びプログラムを提供すること。
【解決手段】 ステップ110では、メイン投光器3により近赤外光を照射し、ステップ120にて、メインカメラ1により撮像を行う。ステップ130では、サブ投光器7により近赤外光を照射し、ステップ140では、サブカメラ5により撮像を行う。ステップ160では、顔位置を検出する。即ち、メインカメラ1及びサブカメラ5の画像を用いて、三角測量の原理を利用して、顔との距離を求める。従って、2回目からは、各カメラ1、5と顔との距離に応じて、メイン投光器3から照射する近赤外光の好ましい投光量(従ってメイン投光器3のパワー)を算出する。
(もっと読む)
自動顕微鏡スライド組織サンプルマッピング及び画像取得
この方法は、組織サンプルセットの画像を受け入れる工程(620)を備える。少なくとも1つの他の組織サンプルに対する各組織サンプルの画像中の位置は、電子的に識別される(640)。各組織サンプルは、組織サンプル位置の識別に基づいて電子的に識別される(660)。 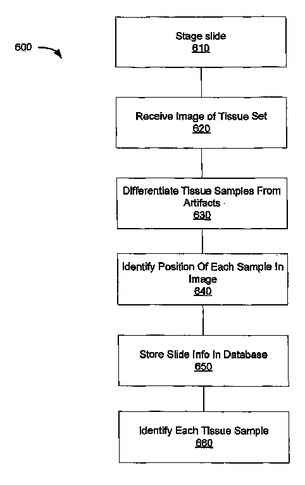 (もっと読む)
(もっと読む)
画像処理装置および方法、記録媒体、並びにプログラム
【課題】シェーディングを補正するようにする。
【解決手段】 撮像素子2から読み出される各画素毎に、その画素に対応する水平カウンタ値および垂直カウンタ値が、信号発生器11から、光軸中心座標設定部21、および上下左右の距離重み付け部22を介して距離算出部23に供給され、そこで光軸中心位置との距離が算出され、その距離に応じた、ズームWIDE端とズームTELE端の補正係数がLUT24,25により取得される。取得された2個の補正係数は、ゲインブレンド処理部27により、ブレンド比設定部26で決められた混合比でブレンドされる。ブレンドされたシェーディング補正係数は、ゲイン調整部28によりゲイン調整された後、補正部29に供給される。これにより、撮像部3から供給される各画素の信号に対し、光軸中心位置との距離に応じた補正が行われる。本発明は、デジタルスチルカメラに適用することができる。
(もっと読む)
回転入力情報を生成するためのシステム及び方法
回転情報を取得する装置及び方法を提供する。複数の位置から複数のパターン化画像を捕捉し、複数のパターン化画像を相関させ、直線差分の組を生成し、直線差分の組を用いて、回転情報を生成する。好ましくは、複数の位置は、指紋スワイプセンサの第1の部分及び指紋スワイプセンサの第2の部分を含み、各部分は、指紋画像の部分を捕捉する。各部分は、2つの位置における指紋画像の部分を捕捉し、2つの位置の部分を相関させ、直線差分の1つの組を判定する。同時に、直線差分の組を用いて、回転情報を算出し、これに基づき、操作ホイール、ジョイスティック又はナビゲーションバー等の回転操作子をエミュレートする。 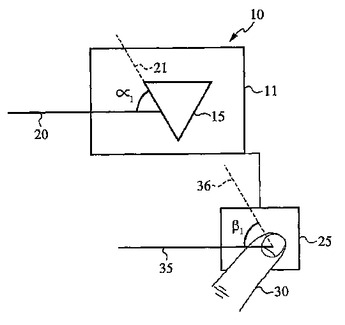 (もっと読む)
(もっと読む)
光学端末装置、画像処理方法およびシステム
【課題】手ぶれによる画像の歪みを解消し、完全なイメージデータを取得することによって、文字認識を確実に実行できるようにするとともに、取込んだイメージデータに対する文字認識を端末あるいは携帯端末以外の装置において実行し、その認識結果をアプリケーション等で文字認識を行ってデータを所望の制御部に入力することを可能とした光学的文字認識装置およびシステムを提供すること。
【解決手段】マウス機能と連動しており、書類上に書かれた関心のある個所のイメージのみを取り込め、文字やコードの認識はアプリケーションの背後で行うことができ、その認識結果はアプリケーション上の予め希望した場所へ直接入力される。スキャナ・モジュールは、マウスや携帯電話に組み込むことができ、インターネットを利用した様々な応用が考えられる。
(もっと読む)
画面の線欠陥検出方法及び装置並びに画像データの補正方法
【課題】 撮像時における検査対象とカメラ撮像素子面とのアライメント調整を不要とし、正常な長方形画像を作成可能にし、またエッジ付近の低コントラストな線欠陥までも検出可能とする。
【解決手段】 検査対象10の画面全体を撮像する撮像手段20、撮像による取込画像のノイズを除去するノイズ除去部32、取込画像の中から検査対象画面に対応する被検査部画像を抽出する被検査部抽出部34、被検査部画像を幾何学的変形により長方形画像として再構成する被検査部再構成部35、長方形画像のシェーディング補正を行う画像データ補正部36、補正後の画像の輝度値を水平・垂直方向にそれぞれ積算する欠陥抽出部37、及び水平・垂直方向の各積算値をしきい値と比較することにより線欠陥を検出する欠陥判定部38を有する構成。
(もっと読む)
光学機器の調整および検査システム
【課題】 単純な構成で且つ精度の高い位置補正を行い、かつ、シェーディング補正を行うことのできる光学機器の調整および検査システムを提供する。
【解決手段】 チャート100を用いて基準画像を撮影し、撮影した基準画像から相対座標基準点の絶対座標と、取得したい画像特性のある座標を相対座標基準点からの相対座標で表して水平垂直方向の位置補正量を導出する第1の演算手段(CPU401および記録装置402)と、チャート100を撮影して前記相対基準点近傍を走査して前記相対座標基準点の絶対座標を求め、基準画像と撮影画像の相対座標基準点とを比較して水平垂直方向の画角補正を行う第2の演算手段(CPU401および記録装置402)とを備えた。
(もっと読む)
距離算出方法及び撮像装置
【課題】 簡単なハードウェア構成で良好な距離の計算を行う。
【解決手段】 端子1X、1Yからの所望の座標と端子2X、2Yからの中心位置の座標が、減算器3X、3Y及び絶対値回路4X、4Yに供給されて座標上の距離値x、yが求められる。これらの距離値x、yが加算器5及び減算器6に供給され、この減算値が絶対値回路7を通じて乗算器8に供給されて端子9からの値b′が乗算される。また距離値xが上位に1ビットシフトされ、減算器10で距離値yが減算されて絶対値回路11に供給される。さらに距離値yが上位に1ビットシフトされ、減算器12で距離値xが減算されて絶対値回路13に供給される。これらの絶対値が加算器14で加算されて乗算器15で端子16からの値c′が乗算される。そして加算器5、乗算器8、15で求められた値が加算器17、18で加算され、算出された疑似距離の値d′が端子19に取り出される。
(もっと読む)
画像評価装置
【課題】 位置出し用チャートが不要であり撮像素子の素子サイズも小さくて済み、装置構成の簡略化を図りつつ画像評価用チャートに対する撮像素子の位置を自動調整可能な画像評価装置を提供する。
【解決手段】 被検光学系3と、該被検光学系3の光軸上に設置された画像評価用チャート1と、前記被検光学系3を挟んで前記画像評価用チャート1に対向するように前記被検光学系3の光軸上に設置されたスクリーンの中心に撮像素子4を有する受光体5と、該受光体5のスクリーンに映出される前記画像評価用チャート1の像を撮像するCCDカメラ6と、前記撮像素子4及びCCDカメラ6の出力を処理し、前記CCDカメラ6で撮像した画像と前記撮像素子4との位置ずれ量を検出する画像処理装置7と、画像処理装置7にて検出した前記位置ずれ量に応じて前記受光体5及び撮像素子4の前記被検光学系3に対する位置関係を調整する移動装置8とを有するものである。
(もっと読む)
421 - 438 / 438
[ Back to top ]