
Fターム[5B057AA07]の内容
Fターム[5B057AA07]の下位に属するFターム
Fターム[5B057AA07]に分類される特許
721 - 740 / 882
画像処理装置及び画像処理方法

【課題】処理対象画像において検出対象とする画像領域を検出する検出精度を向上させる。
【解決手段】画像処理装置1は、曲率フィルタを用いて、処理対象である医用画像の各画素毎に、医用画像の濃度分布の曲面の形状を表す特徴量であるShape Indexを算出し、濃度分布の凹凸を強調した画像(Shape Index画像)を作成する。そして、Shape Index画像を、予め設定されたShape Indexの閾値を用いて二値化することにより異常陰影候補領域を検出し、検出された異常陰影候補領域の特徴量に基づいて当該異常陰影候補領域から偽陽性の画像領域を削除することにより、異常陰影の画像領域を検出する。
(もっと読む)
画像表示方法

【課題】 部分的に歪みの強弱が存在する異方性画像と等方性画像の重畳に対応できる。
【解決手段】 内視鏡画像を含む所定の歪を有した異方性画像を得た計測装置によって2次元格子画像を撮像する工程と、前記撮像された2次元格子画像の共線性の条件を適用することにより前記異方性画像に対する第1の歪み補正ベクトルマップを算出する工程と、前記算出された第1の歪み補正ベクトルマップより歪の最小位置を求める工程と、前記求められた最小位置より前記2次元格子画像の位相分布から前記異方性画像に対する第2の歪み補正ベクトルマップを算出する工程と、前記算出された第1及び第2の歪み補正ベクトルマップにより前記異方性画像の歪みを補正して等方性画像へ変換する工程と、前記変換された等方性画像と画像診断装置によって撮影された等方性画像とを重畳する工程と、前記重畳された画像を表示する工程と、を含む。
(もっと読む)
超音波診断装置
【課題】 3次元超音波データを部分的に消去するプリカットラインを設定して、胎児のみの3次元超音波画像を描出する超音波診断装置を提供する。
【解決手段】被検体2に超音波を送受信する超音波探触子3と、超音波探触子3から受信される3次元超音波画像データに基づいて3次元超音波画像を構成する超音波画像構成部5と、3次元超音波画像を表示する表示部6を備えた超音波診断装置において、3超音波画像データを部分的に削除するプリカット手段を備え、該部分的に削除された3次元超音波データに基づいて3次元超音波画像を表示させる。
(もっと読む)
医用画像処理装置
【課題】 多量の画像データから食道バレット等の注目する性状の判定を効率良く行うことができる医用画像処理装置を提供する。
【解決手段】 食道内部を撮像した多量の内視鏡の画像データから食道バレットの場合の性状を判定するために胃食道接合部の特徴を検出すると共に、その存在が判定されるまで順次フレーム番号を変えて同様の処理を繰り返し、胃食道接合部が存在する判定が得られた画像からそれ以降の画像に対して食道バレットの特徴を検出する検出処理を行い、かつ検出処理された画像がバレット食道であるか否かの性状の判定を行うようにした。
(もっと読む)
血流測定装置
【課題】 本発明では、より簡単で、より短時間に生体内の血流を測定する血流測定装置を提供する。
【解決手段】 造影剤が注入された検体の生体組織の所定領域の血流量を測定する血流測定装置は、前記所定領域が撮影された時系列に連続している複数のフレーム画像データを取得して(S11)、各フレーム画像をマトリックス状に分割し(S12)、これらのフレーム画像データに基づいて時間の経過に対する前記区画毎の輝度値の変化を算出し(S13,S15)、この結果より前記区画毎について前記造影剤の平均通過時間を算出し(S16)、平均通過時間の逆数を算出する(S17)。これにより、上記課題の解決を図る。
(もっと読む)
管腔画像処理装置、管腔画像処理方法及びそのためのプログラム
【課題】本発明は、管腔内画像に基づいて、噴門部の検出ができる管腔画像処理装置を提供することを目的とする。
【解決手段】本発明の本発明の管腔画像処理装置としての端末装置7は、消化管を撮像した1枚のあるいは複数の管腔内画像から所定の特徴量を算出する特徴量算出処理と、算出された特徴量づき消化管の境界部を検出する検出処理と、その検出結果に基づいて、管腔内画像が食道から噴門部に係る部分の画像であると判定する判定処理とを備えた。
(もっと読む)
ハイビジョンデジタル内視鏡画像のファイリング及びコンピューター支援診断装置
【課題】 本発明は、ハイビジョンアナログ信号をA/D変換してデジタル画像として生成・保存するファイリング及び電子内視鏡のデジタル画像の特徴量解析を行い、人工知能を応用してコンピューター支援診断の結果をリアルタイム表示するコンピューター支援診断装置を得ることを目的とする。
【解決手段】 本発明は、ハイビジョンのアナログ信号を変換するA/D変換機と、前記信号をフレームメモリー上に格納するキャプチャーボード、該キャプチャーボードのフレームメモリー上の画像データが転送されるメモリー回路、該メモリー回路のメモリー上の画像データがγ補正なしの原画像に変換され、画像特徴量を自動計算し病変の診断を行うソフトウェアーとCPU、前記画像特徴量とコンピューター支援診断の結果を入力画像とともにD/A変換してハイビジョンモニターに転送するD/A変換機、前記D/A変換機に接続されたハイビジョンモニターとより構成される。
(もっと読む)
画像表示装置
【課題】
検査対象の3次元での体動や変形を評価し、異なる撮像手段からの画像同士を融合させて実時間で表示する体動および変形画像表示装置を提供する。
【解決手段】
検査対象1に対して超音波を送信し前記検査対象からの反射信号を取得する、圧電素子がアレイ状に配列された第1及び第2の超音波探触子2と、前記第1及び第2の超音波探触子によって取得した反射信号を用いて2次元超音波画像を構成し、その画像面内に前記検査対象の体動評価に用いる評価領域を複数個設定し、前記評価領域内の3次元体動および変形量を検出する体動検出部12と、前記2次元超音波画像と同一領域を含むMRI画像を取得し、その画像面内に前記評価領域に対応する領域を設定して整合をとる手段と、前記体動検出部で評価した体動を用いてMRI画像を移動または変形させる画像変形部を有し、MRIの変形画像を実時間で表示する。
(もっと読む)
医用画像処理装置及びプログラム
【課題】偽陽性候補の誤検出を減らし、異常陰影候補の検出精度を向上させる。
【解決手段】異常陰影候補検出部16は、T2強調画像を複数の閾値に基づいて2値化した各2値化画像について1次検出を行う。1次検出により複数回検出された第1の1次候補及び少なくとも1回検出された第2の1次候補について、1次候補領域の重心の位置情報に基づいて、T2強調画像とT1強調画像間の位置ズレを補正する。次いで、T1強調画像から脳実質領域を抽出し、当該脳実質領域に存在する1次候補を偽陽性候補として検出し、1次候補から当該偽陽性候補を削除する。最後に、T1強調画像において1次候補の領域とその周辺領域とのコントラストを求め、当該コントラストに基づいて1次候補がラクナ梗塞陰影候補であるか否かの最終判定を行い、最終判定された1次候補をラクナ梗塞陰影候補の検出結果として出力する。
(もっと読む)
対象物の移動による画像アーチファクトの減少を伴う生物医学画像の登録のための方法と、コンピュータプログラムプロダクト
登録されるべき第1と第2画像において、一定の数の特徴又はランドマークが自動的に定義され、追跡されて、第1と第2画像間の光学フローベクトルが定義されることを特徴とする、対象物の移動による画像アーチファクトの減少を伴う生物医学画像の登録のための方法が開示される。登録は、逆光学フローを第2画像に加えることで行われる。定義された各画素に対する隣接領域における平均信号強度を定義し、平均信号強度を所定の閾値と比較することによって、自動特徴選択ステップが実行される。もし前記近隣領域の平均信号強度が、所定の閾値より高ければ、その画素は特徴として定義され、追跡すべき特徴のリストに加えられる。 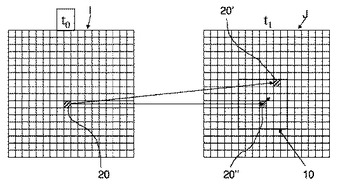 (もっと読む)
(もっと読む)
画像処理装置及びその方法、プログラム
【課題】 位置ずれを生ずることなく高速に差分画像を生成可能な画像処理装置及び方法、プログラムを提供する。
【解決手段】 第1画像及び第2画像を入力し、それぞれに複数の関心領域を設定し、その関心領域毎に該第1画像及び該第2画像間のずれ量を表すシフトベクトルを計算する。そのシフトベクトルに対してフィルタ処理を実行する。フィルタ処理されたシフトベクトルを補間する。補間されたシフトベクトルに基づいて、第1画像及び第2画像を位置合わせする。位置合わせされた画像の対応する画素間で差分演算を行う。差分画像を出力する出力。
(もっと読む)
超音波映像処理方法
【課題】ハードウェア装置により獲得した3次元ドップラー映像を後処理(post-processing)を通じて画質を向上させるための3次元超音波ドップラー映像の画質を改善するための超音波映像処理方法に関する。
【解決手段】本発明による超音波映像処理方法は、a)対象客体の連結性を用いた客体認識アルゴリズムを通じて、入力された超音波映像から対象客体を認識する段階と、b)認識された対象客体の連結性を用いた客体領域を設定する段階と、c)上記客体領域のボクセル傾斜度を用いて構造行列を計算する段階と、d)上記構造行列から拡散行列を計算する段階と、e)上記拡散行列及びボクセル傾斜度を上記入力された超音波映像に適用して超音波映像を得る段階と、を備える。
(もっと読む)
運動学的MR検査におけるモーション解析のためのユーザインタフェース
診断イメージングシステム10において、ユーザインタフェース82が、4D運動学的データセットの表示を容易にする。生体構造要素を指定するため、基準点のセットが第1の3D画像において選択される。アルゴリズム104は、第1の3D画像から選択された基準点の他の3D画像への伝播を計算する。3D画像間の基準点の伝播を説明する変換が規定される。ビデオプロセッサ120が表示する系列状のフレームを規定するため、整列アルゴリズム112が、3D画像へ逆変換を適用する。そのフレームでは、注目する生体構造領域の他の部分が、固定された指定の生体構造要素に対して動く間、各3D画像における基準点により規定される指定された生体構造が、固定されたままになる。  (もっと読む)
(もっと読む)
手術支援システム
【課題】内視鏡観察下において、内視鏡観察画像にこの内視鏡観察画像ではみえない周辺部のバーチャル画像を重畳表示することにより、外科手術等の手術をより円滑に行えるように支援する。
【解決手段】本発明の手術支援システム1は、内視鏡画像51Aと、この内視鏡画像51Aの視点位置に合わせたバーチャル画像とを表示して術者31を支援するもので、前記内視鏡画像51Aでは見えてない周辺部(血管53A等)に関するバーチャル画像データを取得し、このバーチャル画像データに基づくバーチャル画像52Aを前記内視鏡画像51Aに重畳して表示する重畳表示制御手段(CPU25、合成回路25A)を有している。
(もっと読む)
画像処理装置
【課題】 自家蛍光を利用した擬似カラー画像のちらつきを防止する。
【解決手段】 内視鏡プロセッサ20は、参照用光源22、励起用光源23、第1信号処理回路35a、フィルタ処理回路36、ヒストグラム演算回路37、及び擬似カラー演算回路38、を備える。内視鏡プロセッサ20と内視鏡50とを接続することにより、撮像素子53を第1信号処理回路35aに接続する。第1信号処理回路35a、フィルタ処理回路36において、撮像素子53が生成する原画像信号からノイズ成分を除去したフィルタ画像データを生成する。参照用光源22、或いは励起用光源23からの光を照射する時に生成するフィルタ画像データに基づいて、ヒストグラム演算回路37、及び擬似カラー演算回路38は擬似カラー画像データを作成する。
(もっと読む)
パターン認識システムと方法
本発明は、概ね撮像システムを対象とするものであり、より詳しくは、パターン認識用のシステムと方法とを対象とするものである。ある実施例において、医用撮像システムは、撮像装置と、コンピュータ使用可能な媒体と、を含有しており、コンピュータ使用可能な媒体は、撮像装置に電気的に接続されており、プロセッサによって実行されたとき、撮像装置によって受信された信号から画像を生成する処理と、画像にデコンボリューションを行う処理と、その後、デコンボリューションの行われた画像から所望のパターンを抽出する処理と、を実行するように、上記プロセッサを動かす、一連の命令を有している、ものである。  (もっと読む)
(もっと読む)
画像処理装置
【課題】 生体組織の内壁面下の浅い位置を通る毛細血管等を鮮明に表示する。
【解決手段】 内視鏡プロセッサ20は、参照用光源22、レーザ光源23、第1信号処理回路35a、及び映像信号処理回路36を備える。内視鏡プロセッサ20と内視鏡50とを接続することにより、撮像素子53を第1信号処理回路35aに接続する。映像信号処理回路36において、参照光を照射する時に撮像素子53が生成する参照光画像信号から参照光エッジデータを生成する。レーザ光を照射する時に撮像素子53が生成するレーザ光画像信号レーザ光エッジデータを生成する。更に映像信号処理回路36において、参照光エッジデータとレーザ光エッジデータの中でレーザ光エッジ画像にのみ表示されるエッジを抽出した部分エッジデータを生成する。
(もっと読む)
画像処理装置
【課題】 自家蛍光を利用した擬似カラー画像のちらつきを防止する。
【解決手段】 内視鏡プロセッサ20は、参照用光源22、励起用光源23、第1信号処理回路35a、ヒストグラム演算回路37、及び擬似カラー演算回路38、を備える。内視鏡プロセッサ20と内視鏡50とを接続することにより、撮像素子53を第1信号処理回路35aに接続する。撮像素子53が画像信号を生成する。第1信号処理回路35aとヒストグラム演算回路37は画像信号を画像データとして擬似カラー演算回路38に送る。擬似カラー演算回路は参照光画像データと蛍光画像データとに基づいて、徐々に色相が変わる擬似カラー画像データを作成する。
(もっと読む)
食道粘膜用画像処理装置
【課題】 バレット食道の診断等を効率良く行うのに適した食道粘膜用画像処理装置を提供する。
【解決手段】 食道内の粘膜を撮像した内視鏡画像から食道の管腔方向となるZ方向と周方向となるθ方向の座標系に変換した展開図を生成し、さらに食道の本来の粘膜となる扁平上皮とこの扁平上皮が胃側粘膜に変性した円柱上皮との境界の上皮境界を検出し、さらにバレット食道の症例に多く見受けられる上皮境界が複雑な形状になっている場合の特徴を備えているかを上皮境界のZ方向の分散値σAを算出して基準値σthと比較することによりバレット食道か否かを判定する。
(もっと読む)
超音波診断装置
探触子10によって受信されたエコー信号は、メモリ18へ記憶される。操作盤28aにはメモリ18へ記憶されたエコー信号の読出し感度範囲を設定する読出し範囲設定器34が少なくとも1つ設けられ、メモリ18へ記憶された全感度範囲のエコー信号から読出し範囲設定器34によって設定された感度範囲のエコー信号がメモリ18から読み出される。メモリ18から読み出されたエコー信号はディジタルゲイン調整回路31によってモニタ24aの表示ダイナミックレンジに対応したデータへ変換される。データ変換されたデータは画像構成部22へ入力され画像データが形成され、この画像データはモニタ24aの画面に表示される。  (もっと読む)
(もっと読む)
721 - 740 / 882
[ Back to top ]