
Fターム[5B057AA16]の内容
Fターム[5B057AA16]に分類される特許
2,441 - 2,460 / 2,648
画像表示装置および画像表示方法

【課題】 三次元の全方向の範囲で、任意の方向の映像出力を得ると共に常に任意方向にあるターゲットの映像を固定して操縦者に提示することのできる画像表示装置および画像表示方法を提供する。
【解決手段】 複数台のカメラから入力された映像を表示する画像表示装置において、
前記映像を球面上に写像する演算を行うと共に、任意の方向の写像に基づき表示用の映像を生成する演算部と、
前記表示用の映像を表示する表示部と、
を有することを特徴とする画像表示装置。
(もっと読む)
画像認識システム、及び撮像装置

【課題】 車室内の乗員の位置、体格、姿勢等を検出する精度を高め、乗員の安全を確保すべく車室内の機器の動作を制御することができる画像認識システム、及び撮像装置を提供する。
【解決手段】 車室内を撮像する撮像装置で撮像した画像データを取得して、画像認識処理を施し、処理結果に基づき出力する画像データを生成する画像処理装置とを備えており、撮像装置は、複数の対物レンズと、該複数の対物レンズへ入射した光の方向を変更する光学機構と、該光学機構で方向を変更された光を受光し画像データを生成する単一の撮像素子とを有し、撮像素子で生成した画像データから乗員に対応する領域を認識し、認識した乗員の位置を算出し、算出した位置に応じて車載機器の動作を制御する。
(もっと読む)
画像処理装置、画像処理方法及び車両監視システム
【課題】 車両の追跡が容易な画像処理装置、画像処理方法および車両監視システムを提供すること。
【解決手段】 画像処理装置5は、道路10の車両進行方向に沿って複数設置される監視カメラ2からの映像信号をA/D変換して変換画像を得る。その後、画像処理装置5は、変形画像について分割領域を設定し、所定のサンプリング点に基づいて分割画像を得る。画像処理装置5は、この分割画像を道路10が連続するように合成して合成画像を得て、合成画像に基づいて車両検出を行う。その後、車両の追跡処理が行われ、車両画像や背景画像の補正を経て画像処理装置5から出力された画像データは、モニタ61に表示される。
(もっと読む)
画像認識システム、撮像装置及び画像認識方法
【課題】 サイドミラーに配設することができ、車両の前方及び後方の死角を監視することができる画像認識システム、撮像装置、及び画像認識方法を提供する。
【解決手段】 外部を撮像する撮像装置は、視野角が180度以上であるレンズを有し、該レンズが車両側方で略鉛直下向きになるよう配設してあり、車両の走行速度を検出して、車両の走行速度が所定速度より速い場合、撮像装置から取得した画像データの車両後方を撮像している部分を抽出し、車両の走行速度が所定速度以下である場合、撮像装置から取得した画像データの車両前方を撮像している部分を抽出し、それぞれ抽出した画像データに対して画像認識処理を施す。
(もっと読む)
車両用トンネル検出装置および車両用ライト制御装置
【課題】 トンネルを容易かつ確実に、特に高架橋といった道路の上を立体的に交差する状態の構造物をトンネルと誤認することなくトンネルを検出することができるようにする。
【解決手段】 カメラ3は車両の進行方向における前方領域および斜め上方領域を撮像する。CPU4は、進行方向における斜め上方領域の画像での平均輝度が所定値よりも小さくなったか否か判定し、斜め上方領域の画像での平均輝度が所定値よりも小さくなると、前方領域の画像および斜め上方領域の画像における、その両画像での平均輝度の差を求める。さらに、CPU4は前方領域の画像と斜め上方領域の画像での平均輝度の差が所定値よりも小さいと、トンネルであると判定して車両ランプを点灯させる。
(もっと読む)
非合法自動車の識別装置および方法
本発明は、非合法自動車識別装置および方法を開示する。その非合法自動車識別装置は、マイクロコンピュータ(1)と、通報手段(2)と、部材偽造識別装置(3)と情報ディスプレイ(4)とを含む。各部材偽造識別装置(3)は、データ及び暗号メモリを有していて、合法的登録を介してナンバープレート及びその他の部材に据え付けらている。管理センタあるいは検出ステーションのマイクロコンピュータによって、自動車の現状が自動的に監視される。その現状とは、ナンバープレートが本物か偽物か、ナンバープレートと自動車が一致するかどうか、自動車の主部材とその本体の色、デザイン、車枠、及びサイズが合法的に登録されているものと一致するかどうか、その自動車が所定の審査に期間内に合格したかどうか、その自動車が関係執行機関によって特別に追跡されているものに属するかどうかである。本発明は、非合法自動車の識別に用いられ、法律行政機関に自動車の合法状況を認識させるための情報を提供する。  (もっと読む)
(もっと読む)
周辺物体情報取得装置及びこれを用いる駐車支援装置
【課題】 信頼性の高い物体情報のみを取得できる周辺物体情報取得装置の提供。
【解決手段】 車両に搭載され、該車両の周辺に存在する物体に関する物体情報を取得する周辺物体情報取得装置80において、前記車両から所定方向に発射した検出波の反射波を受信して該検出波の反射点を点列で出力する測距手段70と、前記点列を記憶する手段82と、前記記憶手段に記憶された点列に基づいて、物体の存在を検出する物体検出手段と、前記点列を曲線又は直線で近似して近似曲線又は近似直線を導出する近似手段85と、前記点列の信頼性を評価する評価手段86と、前記評価手段による評価結果に基づいて、前記点列若しくは前記近似曲線又は近似直線から導出可能な情報を、前記検出した物体に関する物体情報として採用すべきか否かを判定する判定手段87とを備えることを特徴とする。
(もっと読む)
車両周辺認識システム及び画像処理装置
【課題】 撮像装置で撮像して得られた撮像画像から、外界の人工構造物を示す人工構造物領域を除去して車両周辺を認識する車両周辺認識システム及び該車両周辺認識システムを構成する画像処理装置を提供する。
【解決手段】 画像処理部45は、撮像画像を該撮像画像の湾曲部分を矯正した矯正画像に変換するための変換テーブルを有するLUT451と、矯正画像の画素が有する輝度に基づいてエッジを検出するエッジ検出部452と、検出されたエッジ画像に基づいて直線又は角を検出する直線・角検出部453と、検出された直線又は角に基づいて外界の人工構造物に対応する人工構造物領域を特定する人工構造物領域特定部454と、特定された人工構造物領域を除いた矯正画像に基づいて歩行者認識処理を行う歩行者認識部455と、矯正画像を記憶するフレームメモリ456とを有する。
(もっと読む)
画像編集装置、画像編集方法、画像編集プログラムおよびコンピュータに読み取り可能な記録媒体
【課題】画像データの編集の容易化を図ること。
【解決手段】画像編集装置は、画像イメージを含む画像データの入力を受け付ける入力部101と、入力部101によって受け付けられた画像データの画像イメージ内に含まれる人物に関する画像イメージを抽出する抽出部102と、抽出部102によって抽出された人物に関する画像イメージ内の人物を識別する識別部103と、識別部103によって識別された識別結果に基づいて、抽出部102によって抽出された人物に関する画像イメージを含む画像データを分類する分類部104と、分類部104によって分類された分類結果に基づいて、人物に関する画像イメージを含む画像データを人物ごとのアルバムデータに分配するとともに、人物に関する画像イメージを含まない画像データをすべての人物のアルバムデータに分配する分配部105と、を備える。
(もっと読む)
画像生成方法、画像生成装置、及び画像生成プログラムならびに画像処理方法、画像処理装置、及び画像処理プログラム
【課題】動画像において隠蔽された被写体像を提示できるようにする。
【解決手段】一連の画像フレームを入力し、前記一連の画像フレーム内で物体が占める領域を示す領域情報を入力し、前記一連の画像フレームにおける第1の画像フレーム内の注目点を入力し、前記注目点に対応する物体の隠蔽物体領域を前記領域情報に基づいて推定し、推定された隠蔽物体領域の輝度値を前記一連の画像フレームから求めることにより提示用画像フレームを生成する。
(もっと読む)
車両検知装置
【課題】新型車についても車両として検知できる車両検知装置を提供する。
【解決手段】
車両検知装置は、特徴量の入力を受け付けて車両か否か判定する識別器(ニューラルネットワーク)を記憶する。そして、カメラの画像から抽出した特徴量を識別器に入力し車両か否か判定する。その判定結果と、レーダ車両検知の結果が不一致の場合、カメラで撮像した画像パターンを教師データに登録する。教師データを用いて識別器を学習させ更新する。
(もっと読む)
車両周辺監視装置
【課題】赤外線画像上において歩行者と人工構造物とを的確に区別して抽出する。
【解決手段】2値化対象物OBの下端から下方に互いに隣接する複数の第1探索領域Mask_U1(I)を設定し、第1探索領域Mask_U1(I)の視差dn1(I)と2値化対象物OBの視差Δdとにより、|dn1(I)−Δd|<所定閾値DISP_TH又は(dn1(I)−Δd)≧DISP_THとなる最下端位置の第1探索領域Mask_U1(I)を検出する。(dn1(I)−Δd)≧DISP_THの場合、2値化対象物OBと略同等の視差を有する最下端位置の第1探索領域Mask_U1(K)の下端位置D_F_yPから、他の対象物O1の高さdelta_Hを算出し、他の対象物O1により遮蔽される2値化対象物OBの縦幅O_delta_Hを推定する。グレースケール領域の下端位置Ob_min_yを(D_F_yP+O_delta_H)とする。
(もっと読む)
車両周辺監視装置
【課題】赤外線画像上において歩行者と人工構造物とを的確に区別して抽出する。
【解決手段】人工構造物判定処理では、グレースケール画像において、縦方向の各縦位置J毎での横方向に沿った輝度値の平均値の縦位置Jに応じた変化(横平均輝度プロジェクション)F(J)と、横平均輝度プロジェクションF(J)での縦位置Jに応じた傾きの変化(微分係数)S(J)とに基づき、最大ピーク位置j_enと最小ピーク位置j_stを検知する。最大ピーク位置j_enと最小ピーク位置j_stとの差分に対応する実空間での区間長さが所定長さSLOPE_TH(例えば、1m)よりも長い場合には、縦方向における熱分布が相対的に緩やかであると判断して、2値化対象物が人工構造物であると判定して、一連の処理を終了する。
(もっと読む)
画像認識装置及び方法、ナビゲーション装置
【課題】 行路中に画像処理に関して、その処理上障害となる事象が比較的頻繁に発生することがある地点が含まれている場合に、合理的な処理負荷で画像処理を実行することができる画像認識装置を得る。
【解決手段】 走行路R上を走行する走行体1に装備可能に構成され、撮像手段により撮像された撮像画像i1から走行路Rに存する認識対象3を所定の認識ロジックに従って画像認識する画像認識手段を備えた画像認識装置を構成するに、画像認識を困難とする障害発生の可能性が高い地点である認識障害地点Oと前記認識障害地点以外の地点Nとで、画像認識手段における認識処理を異ならせる認識処理変更手段を備える。
(もっと読む)
車載用ナビゲーション装置
【課題】 工事予告看板等に記載の工事予告情報を有効に利用し、工事地点を避けた走行ルートの選択が可能な車載用ナビゲーション装置を得る。
【解決手段】 現時点が、工事期間中にあるか否かを判定する現時点判定手段と、誘導ルートが、工事地点を含むか否かを判定する誘導ルート判定手段とを備え、いずれかの工事に関し、現時点が前記いずれかの工事の工事期間内にあり、且つ、誘導ルートが前記いずれかの工事の工事地点を含む場合に、いずれかの工事に関連づけられた工事情報を出力させる出力制御手段を備える。
(もっと読む)
車両周辺監視装置
【課題】赤外線画像上において歩行者と人工構造物とを的確に区別して抽出する。
【解決手段】2値化対象物OBの上端から上方の領域に縦方向(y方向)および横方向(x方向)に沿って互いに隣接する所定の縦幅(高さ幅)および横幅の複数の探索領域)を設定する。2値化対象物OBに連続して配置されている各探索領域に対して、右画像と左画像との相間演算により各探索領域の視差を算出し、2値化対象物OBに対する視差に対して、差の絶対値が所定閾値より小さい場合、探索領域は2値化対象物OBと略同等の視差を有する領域であると判断する。2値化対象物OBと略同等の視差を有する最上端位置の探索領域の位置をグレースケール領域の上端位置とする。
(もっと読む)
物体検出装置、物体検出方法、物体検出プログラム、距離センサ
観測対象空間に存在する少なくとも1つの物体を検出する物体検出装置であって、検出対象物体の形状を表す画像である物体モデルを算出して記録する物体モデル記録部3と、一度に観測対象空間の全体をカバーするミリ波を照射し、物体候補の距離の算出を行うミリ波距離センサ1と、視点の異なる特徴画像と距離画像を算出するステレオ画像センサ2と、物体候補を選択する制御部7と、物体モデルから照合モデルを算出するモデル変換部4と、特徴画像と距離画像から照合画像を抽出する照合画像抽出部5と、照合モデルと照合画像の類似度を算出し、最大類似度が所定の範囲内となった場合、照合画像の座標と物体候補の距離から前記物体の3次元位置を算出し、前記物体の3次元位置を外部へ出力する類似度照合部6とを備えてなる。 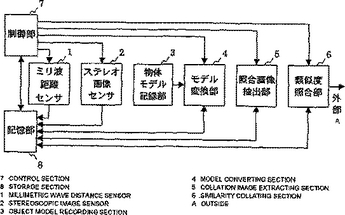 (もっと読む)
(もっと読む)
車両周辺監視装置
【課題】赤外線画像上において歩行者と人工構造物とを的確に区別して抽出する。
【解決手段】人工構造物判定処理では、グレースケール画像において縦方向の各縦位置J毎での横方向に沿った輝度値の平均値の縦位置Jに応じた変化(横平均輝度プロジェクション)F(J)に基づき、所定の輝度分布、例えば互いに所定間隔を置いた位置に配置される同等の最大輝度値を有する極大位置Hi1,Hi2および同等の最小輝度値を有する極小位置Low1,Low2が存在するか否かを判定し、存在する場合には、2値化対象物が、2個の発熱体が鉛直方向に沿って所定間隔を置いて配置された人工構造物であると判定し、存在しない場合には、2値化対象物が人工構造物以外であると判定する。
(もっと読む)
物体検出装置、および方法
【課題】 自車両前方を撮像した画像内に存在する道路上の境界線を簡易に検出すること。
【解決手段】 制御装置103は、カメラ101で撮像した自車両前方の画像を画像処理して、各画素の画像の速度情報を算出し、算出した各画素の画像の速度情報に基づいて、速度情報を有する画素を抽出し、抽出した画素によって構成される斜線を検出し、検出した斜線に基づいて道路上の境界線を検出する。
(もっと読む)
位置検出装置及びその補正方法
【課題】複数の撮像手段の光軸を調整する調整装置を用いることなく、光軸間の相対角度に起因する誤差を補正する補正値を高精度に算出して位置を補正することができる位置検出装置及びその補正方法を提供する。
【解決手段】赤外線カメラ16R、16Lから距離Znの位置にエイミングターゲットT1、T2を配設し、赤外線カメラ16RによりエイミングターゲットT1を撮像する一方、赤外線カメラ16LによりエイミングターゲットT2を撮像し、得られた各画像を距離Zの位置に配設された同一のエイミングターゲットT0のものと見なして視差オフセット値を算出する。
(もっと読む)
2,441 - 2,460 / 2,648
[ Back to top ]