
Fターム[5B057AA16]の内容
Fターム[5B057AA16]に分類される特許
2,521 - 2,540 / 2,648
識別方法、識別装置、及び交通制御システム

【課題】背景色及び計測対象物の色の近似による影響を低減してより高精度で計測対象物の有無または種別を認識することが可能な識別方法、及び識別装置を提供する。
【解決手段】画像データ取り込み領域のうち、計測対象物の識別に利用する第1の識別領域及び識別領域から得られる画像データに基づき特定される特性値が、第1の識別領域とは所定値以上相違する第2の識別領域を設定する。予め基準となる第1基準時空間画像及び第2基準時空間画像をそれぞれ生成しておき、第1の識別領域から得られる画像データに基づき生成した第1時空間画像及び前記第2の識別領域から得られる画像データに基づき生成した第2時空間画像と、前記第1基準時空間画像及び前記第2基準時空間画像とを用いて差分時空間画像を生成し、生成した差分時空間画像に基づき計測対象物の有無または種別を識別する。
(もっと読む)
移動物体検出装置および移動物体検出方法

【課題】監視領域内に存在する立体物を抽出し、オプティカルフローを用いて立体物の三次元的な動きを算出して、監視領域内の移動物体を的確に検出可能な移動物体検出装置および移動物体検出方法を提供する。
【解決手段】移動物体検出装置1は、監視領域を撮像して一対の画像を時系列的に出力するステレオカメラ2と、一対の画像から距離データを算出するステレオ画像処理部6と、距離データから監視領域内に存在する立体物Onを認識する認識部10と、一対の画像のうちの時系列的に並ぶ複数の一方の画像および距離データからオプティカルフローΔi、Δj、Δdを検出する検出部11と、距離データとオプティカルフローとから立体物Onの三次元移動成分フローFmv_i、Fmv_j、Fmv_dを算出する算出部12と、三次元移動成分フローに基づいて移動物体と静止物体とを判定する判定部13とを有する。
(もっと読む)
駐車支援システム
【課題】 ユーザが自車両を前進させて駐車開始位置に停止させた後に旋回させながら後退させて駐車させる場合の駐車支援を適切に行う。
【解決手段】 駐車支援ECU2は、自車両が前進しているときに、その時点から自車両が停止して旋回しながら後退して駐車すると仮定したときに自車両が到達し得る自車両の左右方向距離毎の複数の駐車可能位置に対応する複数の駐車可能位置図形を後方鳥瞰画像に重畳して表示する。ユーザは、複数の駐車可能位置図形のいずれかが自車両を最終的に駐車させたい駐車位置に重なるように停止させた後に、自車両を手動または自動で旋回させながら後退させることにより、自車両を駐車位置に適切に駐車させることができる。
(もっと読む)
車両用立体物検出装置
【課題】 本発明は、白線検出と立体物検出を効率的に画像処理する車両用立体物検出装置の提供を目的とする。
【解決手段】 撮像画像に基づいて路面上の白線及び立体物を検出処理する処理手段を有する車両用立体物検出装置において、前記立体物と自車との衝突確率を算出する算出手段を備え、前記処理手段は、前記算出手段により算出された衝突確率が所定値αより大きい場合、処理時間の短い白線検出処理よりも処理時間の長い立体物検出処理を優先的に検出処理することを特徴とする車両用立体物検出装置。
(もっと読む)
物体検出装置とその方法
【課題】簡単な処理により高精度に検出対象の物体のテンプレートマッチングを行うことができ、検出対象の物体を確実に検出できる物体検出装置を提供する。
【解決手段】先行車両検出装置10においては、TTC算出部13で画像データ上の先行車両の像を用いて先行車両との衝突余裕時間(TTC)を求める。テンプレート生成部12でテンプレートを作成した時のTTCと、マッチング対象の画像におけるTTCとの比率に基づいて、拡大縮小処理部14でテンプレートの拡大又は縮小を行う。パターンマッチング処理部15では、サイズの調整されたテンプレートを用いて、画像データのマッチングを行う。
(もっと読む)
駐車支援システム
【課題】 ユーザが自車両を駐車開始位置に停止させてから駐車動作を開始させるまでのタイミングの遅れを抑える。
【解決手段】 駐車支援ECU2は、自車両が前進しているときに、自車両後方を撮影し、自車両が前進して駐車開始位置に停止した後に、自車両が前進しているときに撮影された複数の撮影画像が視点変換された複数の鳥瞰画像を画像解析して自車両が駐車可能な位置を駐車候補位置として検索し、自車両が駐車可能な位置が存在すれば、自車両が駐車可能な位置を合成鳥瞰画像上に駐車候補位置として表示する。
(もっと読む)
車両用道路標示検出装置
【課題】 道路標示の検出信頼性の向上と画像処理負荷の低減
【解決手段】 自車前方を撮像した撮像画像を処理して道路上の進行方向に連続して描かれる道路標示を1文字または1記号ずつ検出するときに、道路標示の1文字または1記号が検出されるたびにその検出結果に基づいて撮像画像上の画像処理領域を絞り込み、連続して検出された文字または記号に基づいて道路標示を識別する。
(もっと読む)
物体検出装置及び物体検出方法
【課題】 従来よりも確実に物体を検出することができる物体検出装置を提供すること。
【解決手段】 物体検出装置1に、赤外線カメラ2と、隣接する新規画素間の輝度差を算出し、輝度差が所定値α1以上となる新規画素を特徴点とするエッジ抽出部41と、特徴点を含む領域から物体を検出する物体検出部44と、を備える。
(もっと読む)
白線認識方法及び白線認識装置並びに白線認識システム
【課題】複雑な画像処理を必要とせずに、車両と白線との位置関係を認識する技術を提供することが目的とされる。
【解決手段】白線認識システムは、撮像装置1及び白線認識装置2を備える。撮像装置1は、設置された位置から視野7を撮像する。白線認識装置2は画像処理部22及び制御部24を備え、画像処理部22は抽出部及び演算部を有する。抽出部は、撮像された画像に基づいて、白線のエッジ及び車両のサイドのエッジを抽出する。演算部は、抽出部で抽出された結果に基づいて、白線のエッジとサイドのエッジとの距離dを算出する。制御部24は、当該距離が所定の閾値α以下であると判断した場合には、自車両の運転を支援するための信号S2を出力する。
(もっと読む)
画像センサ装置および画像センサシステム
【課題】高解像度カメラの画像をリアルタイム処理する画像センサのバス容量や性能をカメラに応じてアップさせずに従来のままで、一次判定用画像の認識精度アップを図る。
【解決手段】一次判定用画像データ(物体検知用)として、高解像度カメラ10の撮影画像(原画像データv)を一定比率で間引き処理した縮小画像データv1を用いる。検出処理部27は、このv1に基づいて車の移動・変化などを検知した場合、フレームバッファ部22の二次判定用の原画像データvの転送要求を転送制御部25に送り、また、検知画素領域を示す検知位置アドレスを詳細解析部28に送る。詳細解析部28は、この転送要求に基づいて受信したvの検知位置アドレス部分の形状や数字などを解析する。(v−v1)をフレームバッファ部に保持する場合や、アドレス生成部24が検知位置アドレスに基づいて解析対象範囲の原画像データのみを詳細解析部28に転送する場合も開示している。
(もっと読む)
ナビゲーション装置
【課題】 カメラを任意の位置に取り付けることができ、カメラで撮影した前方画像と3D地図とを一致させて周囲状況に応じた案内が可能なナビゲーション装置を提供する。
【解決手段】 現在位置を検出する位置検出手段24と、検出された現在位置に応じた2D地図データを取得する地図情報取得手段11と、移動体が進行する方位の前方を撮像する撮像手段10と、取得された2D地図データに基づき生成される2D地図の俯瞰角度、倍率および横方向位置を調整して、撮像手段で撮像することにより得られた前方画像に一致する3D地図を生成する3D地図生成手段12と、前方画像および3D地図生成手段で生成された3D地図を、2Dの前方画像および2D地図にそれぞれ変換して照合を行い、自己の周囲状況を判定する画像照合判定手段13と、画像照合判定手段により判定された周囲状況に基づき案内を行う制御手段35とを備えている。
(もっと読む)
画像生成方法およびその装置
【課題】 複数の撮像手段からの撮像画像による視点変換画像の生成において、認識度の高い視点変換画像を生成できる画像生成方法を提供する。
【解決手段】 車両に配置された1又は複数の撮像手段による画像情報と、空間モデルに基づいて視点変換画像を生成する方法である。前記撮像手段をステレオカメラユニット12で構成し、前記空間モデルに画像情報をマッピングするに際し、前記撮像手段の画像情報でそのステレオ画像の視差が小さい特定領域に関して、超解像補間処理して空間モデルに超解像補間画像をマッピングする。この場合において、特定領域とは視差量が1ピクセルより小さいサブピクセル領域である。
(もっと読む)
車両撮影方法およびその装置
【課題】 輝度値の異なる運転席の運転者とナンバープレートを同時に撮影するためには、ナンバープレートの輝度値が上がり過ぎないようにして車両全体を明るく照明するか運転席用の専用照明が必要になるといった問題があった。
【解決手段】 撮影した原画像からナンバープレートを抽出した画像を予め記憶し、原画像を所定のγ値でγ補正した画像を取得し、該γ補正画像と前記記憶されているナンバープレートの原画像とを合成することでナンバープレートのナンバーと運転席の運転者の顔を明瞭とした画像を抽出することを特徴とする車両撮影方法である。
(もっと読む)
幾何変換回路
【課題】画像処理部の負担を軽減しつつ、画像処理後のデータに基づく判断の信頼性を向上させる。
【解決手段】撮像手段100から入力された画像データを幾何変換し、幾何変換後の画像データを画像処理部200に出力する幾何変換回路1に、画像データを構成する複数の画素データと、各画素データに対応するエラー情報と、を合わせて格納する第一格納手段3と、画像データを幾何変換し、変換画像データを生成する幾何変換手段4と、各変換画素データに対応する各画素データのエラー情報をもとに、各変換画素データのエラーの有無を判定するエラー判定手段5と、変換画像データと、各変換画素データに対応するエラー判定結果と、を合わせて格納する第二格納手段6と、を具備した。
(もっと読む)
見通し距離測定装置
本発明は、景観(landscape)の明視距離(visibility distance)を判定する装置に関する。本装置は、風景画像を撮像するカメラ(12)と、前記風景画像を格納する手段(16)と、前記風景画像内の各画素を、前記カメラと当該画素に対応する前記風景内の点との間の距離を表す情報に関連付けることによって、距離マップを得る手段(14)と、前記風景画像を処理することによって、前記風景画像の画素のコントラストが少なくとも幾つかの隣接画素に関連した所定値よりも大きいか否かを検出する手段(20、22、24)と、最大距離に対応する画素から始めてコントラスト条件を満たす画素が見つかるまで、前記風景画像の複数の画素に前記処理を繰り返して行う手段(20、22、24)と、前記距離マップから、前記画素を距離情報に関連付ける手段(20、22、24)と、を備えている。 (もっと読む)
移動体の識別監視装置
【課題】 昼夜を問わず監視可能で、被監視側であるユーザの負担が少なく、安価で認識率の高い移動体の識別及び監視装置を供すること。
【解決手段】 移動体固有の情報を、バーコードの二次元コードであるQRコード(登録商標)を使用して符号化する。このQRコードは、1m×1mの大きさのシールに、白地に黒色で表示する。このQRコードの白地の部分は蛍光塗料を塗布する。QRコードを表示したシールは、それぞれの移動体に貼り付ける。カメラは一般に広く使用されているカラーカメラを使用し、処理装置は一般に広く使用されているコンピュータを使用、投光器は近紫外線を投光する紫外線投光器を使用する。
(もっと読む)
画像異常判定方法及び画像異常判定装置
【課題】従来より安価な構成で迅速に、しかも、極力判断ミスが極力生じないようにして、撮影画像がフロントガラスに散布状態に付着した雨滴等の付着物の画像を含んだ異常画像か否かの判定を行なう。
【解決手段】自車室内の単眼カメラ(撮像装置)2が撮影した自車1のボンネットを含む自車前方の撮影画像の微分画像を形成し、この微分画像から撮影画像のほぼボンネット前縁部に左右方向に設定した複数個の部分領域それぞれの垂直エッジ成分を探査して検出し、各部分領域毎に、垂直エッジ成分の検出個数から、撮影画像が自車1のフロントガラスに散布状態に付着した雨滴等の付着物の画像を含んだ異常画像か否かを個別判定し、その結果の多数決処理により、撮影画像が異常画像か否かを総合判定する。
(もっと読む)
モバイル・ナビゲーション・ユニットのための高度3D視覚化システム及び方法
モバイル・ユニットのための三次元の視覚的ナビゲーションを提供するシステムは、モバイル・ユニットの現在位置を計算する位置計算ユニットと、現在位置から視錐台を決定する視点制御ユニットと、少なくとも1つの地理データベースと通信して、視錐台と関連付けられた地理的な対象物のデータを入手し、地理的な対象物のデータを編成する風景図を生成する風景図管理部と、風景図をリアルタイムに描写する風景図描写部とを備える。描画の質を高めるために風景図において異なる解像度の画像を混合する方法は、モバイル・ユニットが描かれた地理的な対象物について移動する際の突然の変化を軽減する。地理的な対象物のデータに関する情報の格納及び実行時アクセスのためのデータ構造は、データを視錐台に基づいてオンデマンドにロードすることを可能とし、ナビゲーション・システムがユーザに見える対象物のみをオンデマンドで動的にロードすることを可能とする。 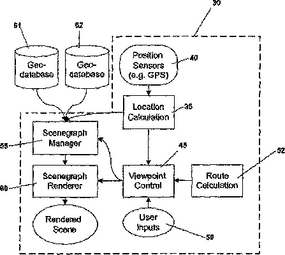 (もっと読む)
(もっと読む)
画像処理装置、および画像処理方法
【課題】 撮像画像内におけるワイパーで隠れた部分の画像を補間すること。
【解決手段】 制御装置103は、カメラ101で撮像した自車両前方の画像を画像メモリ102から読み込んで画像処理し、画像内に存在する物体の速度情報を算出し、算出した物体の速度情報に基づいて、画像内に存在するワイパーを検出する。画像内にワイパーが検出された場合には、画像上のワイパーによって自車両前方の画像が欠落した領域を、カメラ101で過去に撮像したフレームから補間画像を得て補間する。
(もっと読む)
ステレオ画像による平面推定方法
【課題】平面上から十分な特徴点が得られないような場合でも、既知マーカ等の設置なしに、高精度に平面推定を行う。
【解決手段】 平面上を移動する物体が撮像できるように設置された複数の撮像手段によってステレオ画像を撮像し、前記ステレオ画像のうちの基準画像について複数の特徴点を抽出し、抽出した各特徴点について他の画像中の対応点を探索して得られる視差から三角測量の原理により3次元座標を求め、抽出した各特徴点位置の画像に類似する画像を物体の移動前後の画像から検出し、抽出した各特徴点の3次元的な移動ベクトルから前記平面の3次元的位置を算出するようにした。
(もっと読む)
2,521 - 2,540 / 2,648
[ Back to top ]