
Fターム[5B057AA16]の内容
Fターム[5B057AA16]に分類される特許
2,601 - 2,620 / 2,648
表示装置
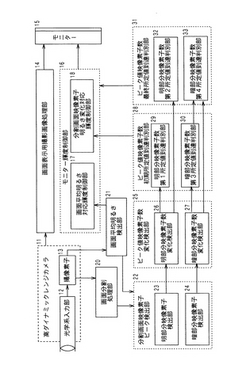
【課題】 周囲環境に対応した適切なモニターの輝度調節を行う表示装置を得る。
【解決手段】 画素毎に明るさを検出可能な高ダイナミックレンジカメラ11で車両前方を撮影し、撮像素子13の撮影画像信号を用い、画面分割処理部20で画面中心の所定範囲内をN×N個に分割し、分割画面映像素子ピーク検出部22で分割画面における所定以上の明るい映像素子部分を明部分映像素子検出部23で検出し、所定以上暗い部分を暗部分映像素子検出部24で検出する。ピーク値映像素子数変化検出部25ではそれらの映像素子数の変化を検出し、ピーク値映像素子数初期所定値到達判別部28でその映像素子数が初期の所定以上になったことを検出したときには、分割画面映像素子明るさ変化対応輝度制御部18でその映像素子数に対応してモニター15の輝度を制御する。その他の場合は画面平均明るさ対応輝度制御部17で画面の平均明るさに対応した輝度の制御を行う。
(もっと読む)
駐車支援装置及び駐車支援方法

【課題】 駐車支援の際の車両と周辺物との干渉の可能性に関する情報をユーザに提供することが可能な駐車支援装置
【解決手段】 目標駐車位置までの目標移動軌跡を算出し、前記算出された目標移動軌跡に従って車両が移動した場合の該車両の車体外側部分が描く外側軌跡を算出し、車両周辺を撮像する撮像手段から得られる実画像上に、前記算出された外側軌跡を重畳表示することを特徴とする。
(もっと読む)
画像上移動物体認識方法及び装置
【課題】移動物体を高速かつより正確に認識する。
【解決手段】時系列画像の各々を複数のブロックに分割し、ブロック単位で背景画像の対応するブロックと比較して両者の非類似度を算出し、該非類似度が基準値以上であれば移動物体が該ブロックに存在すると判定する。第1段階で移動物体領域の概略をブロック単位で高速に認識し、第2段階で該領域のみについてブロック単位で修正する。第2段階での該基準値を第1段階のそれより大きくし、第2段階での該ブロックのサイズを第1段階のそれより小さくし、第2段階で孤立移動物体ブロックのをその近くの移動物体クラスタと一体化し、又は、第1段階で輝度成分のみ用い第2段階で色成分を用いる。これらのいずれかを行っても同一移動物体が分離認識される場合には、第2段階での該基準値を第1段階のそれより小さくする。
(もっと読む)
画像情報処理装置及び画像情報処理方法
【課題】 出力画像を見やすくする。
【解決手段】 電子式カメラ101からの入力画像情報を格納する入力用フレームバッファ102と、再構成テーブルを格納する再構成テ−ブル保持手段104と、入力画像情報の各画素情報ごとの明度補正パラメータを格納する明度補正パラメータ格納手段107と、入力画像情報を再構成テ−ブル及び明度補正パラメータを用いて再構成して出力画像情報を生成する処理手段103と、出力画像情報を格納する出力用フレームバッファ105とを設ける。
(もっと読む)
接近車両認識システム
【課題】 自車両に接近する車両を適切に認識する。
【解決手段】 特徴点抽出部22は、後方撮像カメラ11から入力される画像データに対して他車両の前部において所定地上高位置(例えば、方向指示器が配置される高さ位置等)で車幅方向に所定間隔Lをおいた位置(例えば、車幅方向の両端部等)に配置された1対の発光部材の認識処理を行う。特徴点相対位置検知部24は、抽出した1対の発光部材の自車両に対する相対位置を検知する。対象物距離算出部26は、抽出した1対の発光部材の自車両に対する相対距離の情報を算出する。走行支援判定部27は、1対の発光部材の自車両に対する相対位置と、抽出した1対の発光部材の自車両に対する相対距離の情報と、自車両情報検出部13にて検出した自車両の走行情報とに基づき、走行支援レベルを設定し、この走行支援レベルに応じて、報知装置17を作動させる。
(もっと読む)
障害物検出装置
【課題】複数のカメラによって撮像された他車両が同一車両であるか、異なる車両であるかを的確に判断すること。
【解決手段】自車両の周囲に存在する他車両の中から同一車両である可能性を有している他車両を抽出して、これらの他車両を撮像したカメラのうち任意の一台を基準カメラとして設定し、基準カメラで撮像した他車両の擬似画像パターンを生成する。生成した擬似画像パターンを基準カメラ以外のカメラで撮像した場合に生成される擬似画像パターンに変換して、変換後の擬似画像パターンと、当該基準カメラ以外のカメラで撮像した撮像画像とを比較する。双方の画像のずれが所定位置未満であれば同一車両であると判断し、所定値以上であれば異なる車両であると判断する。
(もっと読む)
画像における移動物体追跡方法及び装置
【課題】移動物体を一時的に隠す遮蔽物が存在し又は移動物体の中間部が背景画像と類似していても、1つの移動物体を画像上で1つの移動物体として認識可能にする。
【解決手段】画像のフレーム内に遮蔽物12の一端側及び他端側に沿ってそれぞれスリットSL1及びSL2を予め設定しておき、一方のスリット内で移動物体の一部が検出され、その後他方のスリット内で移動物体の一部が検出された場合に、該一方の移動物体の一部に付与されている識別符号を該他方の移動物体の一部に付与する。
スリットの替わりに遮蔽物領域を設定して、該領域に隠れた移動物体を推定してもよい。遮蔽物の一端及び他端に沿ったスリット画像をそれぞれ該一端及び他端から遮蔽物の内側へ所定回数複写することにより遮蔽物の幅を擬似的に狭く又は0にしてもよい。画像の縮小比が大きい領域ほどブロックサイズを大きくしてもよい。
(もっと読む)
物体検出装置
【課題】 検出対象となる物体の形状や動きに依存することなく正確に物体の位置を検出する。
【解決手段】 車両20に搭載され、車両20の周囲を撮像するカメラ11と、調査点を中心とし、車両と、実空間における調査点との相対距離に応じて面積が決められた調査領域を画像上に設定し、設定された調査領域を、前記調査点を通過する分割線により2以上の領域に分割し、分割された各領域内の特徴量をそれぞれ算出し、算出したこの特徴量に基づいて、画像上の上部に位置する上部領域に物体が存在し、画像上の下部に位置する下部領域に物体が存在していないと判定した場合に、中心点までの実空間における距離を算出して、物体の位置を求める画像演算処理部13とを備えることで実現する。
(もっと読む)
道路環境認識方法及び道路環境認識装置
【課題】 道路環境を高精度に認識することができる道路環境認識方法及び道路環境認識装置を提供することを課題とする。
【解決手段】 車両に搭載され、道路を撮像した撮像画像から道路環境を認識する道路環境認識装置1であって、任意の道路を撮像した撮像画像から線分を検出し、検出した線分に対して複数の特徴を算出し、各線分に対する複数の特徴と属性との関係を学習することによって得られた属性推定規則を記憶する記憶手段と、認識すべき道路を撮像する撮像手段2と、撮像手段2で撮像した撮像画像から線分を検出する線分検出手段3aと、線分検出手段3aで検出した線分に対して複数の特徴を算出する特徴算出手段3bと、記憶手段に記憶している属性推定規則に基づいて、特徴算出手段3bで算出した複数の特徴から線分の属性を推定する属性推定手段3cとを備え、各線分に対して推定した属性から道路環境を認識することを特徴とする。
(もっと読む)
計測システムおよび計測方法
【課題】 撮影手段の撮影条件に関するパラメータを、より容易に算出させる。
【解決手段】 計測領域内の道路上を直線的に移動ながら通過する試験車両5を、計測領域を撮影するカメラで撮影し、その試験車両5の撮影画像に基づいて、カメラの撮影条件に関するパラメータを算出するとともに、算出したパラメータを用いて車両の速度などを計測する。計測領域内の道路上を直線的に移動ながら通過する試験車両5の撮影画像を用いてパラメータを算出することができるため、予め道路上に基準物を設置する等の困難を要する作業を省くことができる。
(もっと読む)
車両用画像処理装置
【課題】 悪天候下での車両検知性能を向上させる。
【解決手段】 自車の前方を撮像した画像の一部に画像処理領域を設定し、設定した画像処理領域から画像の特徴を導出するとともに、導出した特徴に基づいて車両の存在を判定する車両用画像処理装置において、撮像画像の中の自車に近い位置から遠い位置へ順に画像処理領域を設定し、自車に近い位置から遠い位置へ行くにしたがって画像処理領域を狭くする。
(もっと読む)
ナンバープレート認識装置及び方法
【課題】
進行方向が切替わる交互通行道路において、上りと下りの2台のナンバープレート認識装置を、1台で実施できるナンバープレート認識装置を提供する。
【解決手段】
車両の画像を撮影する車番認識用カメラ1と、車番認識用カメラ1で撮影された画像を画像処理する画像処理プロセッサ13を有する画像処理装置2を備え、画像処理装置2により車番認識用カメラ1で撮影された2つフレームの画像投影間の像投影差分からテンプレート46を算出し、時間経過後の2つのフレームの画像投影間の画像投影差分からテンプレート46とマッチした領域を検索し、テンプレート46とマッチした領域から移動ベクトル50を計算して前面ナンバープレート認識処理と後面ナンバープレート認識処理を切替える。
(もっと読む)
車両周辺画像表示装置
【課題】車両後退時などに、車両の側方領域に存在する障害物と自車両との位置関係を容易に把握可能とすること。
【解決手段】左側用カメラ部および右側用カメラ部は、車両の屋根の両端部にそれぞれ取り付けられており、車両の側方領域を斜め下方に俯瞰して撮影可能である。そして、これら車載カメラから送信された撮影画像データに対して座標変換を行って鳥瞰図画像を表す変換画像データを生成する。その変換画像データと、表示部に表示中の周辺画像に対応する周辺画像データとを比較して車載カメラの視野から外れた領域を抽出し、この抽出された領域を変換画像にマッチングをとって合成し、更新後の周辺画像データとする(S120)。自車両画像を表示部の表示画面中の特定位置に表示させるとともに、周辺画像および現在位置周辺の道路地図を表示部に表示させる(S130)。
(もっと読む)
表示制御装置
【課題】 ユーザに車両周辺の情報を適切に提供する。
【解決手段】 表示制御装置1は、魚眼レンズカメラ3により撮影された撮影画像にあってレンズ端付近の箇所を切出して表示する場合には、その箇所を画像処理により回転させて表示する。例えば通行人が通行している態様を表す撮影画像を表示する場合には、その撮影画像を通行人が垂直方向から傾くことなく通行しているように回転させて表示することにより、通行人が通行している態様をユーザに多大な違和感を与えること無く適切に伝えることができ、ユーザに車両周辺の情報を適切に提供することができる。
(もっと読む)
物体検出装置
【課題】 静止画像から物体を検出するときに、画像上で重複している検出対象物体を分離し、検出対象物体それぞれを認識することができる物体検出装置を提供する。
【解決手段】 物体検出装置1は、画像を撮像するカメラ10,11と、カメラ10,11により撮像された画像から歩行者の候補画像が含まれる探索領域を抽出し、探索領域の座標値、及び、探索領域に含まれる歩行者候補と歩行者との類似度に応じた探索領域の評価値を出力する検出部30と、検出部30から出力された探索領域の座標値に基づいて、探索領域を歩行者ごとに分別する分別処理部42と、分別処理部42により分けられた歩行者ごとの探索領域の座標値に対して評価値に応じた重み付き平均をとることにより、歩行者の位置を算出する代表値作成部43とを備える。
(もっと読む)
車両用走行区分線認識装置
【課題】撮影画像を合成するとき、合成された画像から遠方の走行区分線に対応する点列が欠落することがなく、よって走行区分線を精度良く正確に認識できるようにした車両用走行区分線認識装置を提供する。
【解決手段】車両の進行方向の路面を含む領域を撮影するカメラなどの撮影手段と、撮影された撮影画像中の路面上の少なくとも白線などの破線状の走行区分線を認識可能な区分線認識手段と、異なる時刻に撮影された複数の撮影画像を合成して撮影画像中の走行区分線の長さを延長する画像合成手段(S10からS16)とを備える車両用走行区分線認識装置において、画像合成手段は、区分線認識手段による走行区分線の認識処理における撮影画像中の少なくとも走行区分線の形状に変化を与えない処理段階、具体的にはエッジ検出前の段階で(S12)で撮影画像を合成する。
(もっと読む)
車載周辺状況検出装置
【課題】効率的に標識等の認識を行う「車載周辺状況検出装置」を提供する。
【解決手段】前照灯制御部5は、前照灯1の点灯/消灯の繰り返しを制御する。特徴領域抽出部10は、前照灯1の点灯時に撮影した点灯時画像a、前照灯1の点灯時に撮影した消灯時画像bを差し引いた画像を差分画像cとして生成し、差分画像c中の高輝度領域を特徴領域404として抽出する。画像認識処理部11は、点灯時画像aの特徴領域404の部分のみを対象として画像認識による標識等の認識を行う。
(もっと読む)
障害物検知支援装置
【課題】車外の障害物の位置を、立体音声により使用者に報知する。
【解決手段】車両10の外部に設けられ、車両の周囲の状況を画像として取得するカメラ3F、3R・・と、車両に対して着脱自在に設けられた画像表示装置1Bと、画像表示装置1Bの位置を検出する位置検出装置7と、スピーカー2F、2Rを備え、位置検出装置7で検出された位置に基づいて、使用者の視点から画像表示装置1Bへ向かう延長線上の、車両周囲状況を、カメラ3F・・で取得した画像から切り出し、画像表示装置1Bのディスプレイに表示するとともに、取得された画像から障害物を検出し、該障害物の位置を立体音声によって、使用者に報知する。
(もっと読む)
駐車車両検知方法及び駐車車両検知システム
【課題】 駐車車両の調査を、走行する調査車両を使用して効率的で精度良く行う。
【解決手段】 路上を走行する車両から路上の対象物を水平方向に複数回ラインスキャンしてエピポーラ平面画像(EPI画像)を取得する工程と、前記取得したEPI画像から、撮像した対象物に関する一以上の特徴軌跡を抽出する工程と、抽出した対象物の特徴軌跡の傾きを演算する工程と、演算した特徴軌跡の傾きと前記移動体の移動速度とに基づいて、対象物までの距離を演算する工程と、演算した対象物までの距離に基づいて駐車車両の有無を判別する工程とを備えた。
(もっと読む)
車両の側方周囲の、ビデオベースの監視及び測定のための方法及び装置
初期の市販の運転者支援システムにおいては、適用形態により、走査の解像度と走査される領域の大きさのどちらを重要視するかを考える必要がある。従来のビデオベースのシステムは、解像度と記録範囲の両方を十分兼ね備えてはいるが、一般に、直接の距離情報を供給しない。本発明の目的を有する新規な設備によれば、路上走行車内に設置した場合には、複雑かつダイナミックな場面、たとえば、ダイナミックに動作している車両の視点から、道路の縁に対する側方の3D幾何学的形状を記録し、駐車する際にこれを利用することができるシステムを実現することができる。本発明によれば、車両の側方周囲の監視及び測定は、一方では、ディジタル画像を備えたカメラにより、他方では、画像にタイムスタンプを提供し、かつこれをバッファ処理するよう機能するコンピュータユニットにより表示される。車両の移動は、上記のデータに基づいて、バッファ処理された画像から画像の対を選択するために、さらに記録される。したがって、車両の側方周囲の局所3D深さ画像が、立体画像処理用のアルゴリズムによって生成できる。 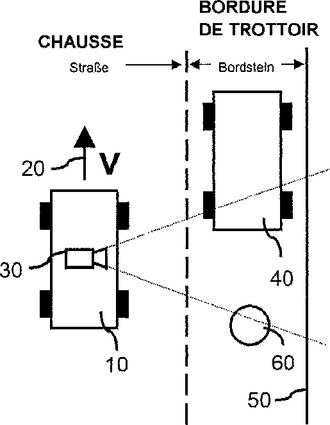 (もっと読む)
(もっと読む)
2,601 - 2,620 / 2,648
[ Back to top ]