
Fターム[5B057AA16]の内容
Fターム[5B057AA16]に分類される特許
2,561 - 2,580 / 2,648
自動車シート上の対象物を検出するための装置
本発明は、対象物の2次元表現を生成するための処理ユニットとカメラを有する、自動車シート上の対象物を検出する装置に関し、装置が少なくとも2つの照明源をさらに有し、当該照明源は、対象物が様々な方向から照明されるように位置決めされ、処理ユニットが、それぞれが様々な照明条件下で生成された2つの2次元表現から対象物の3次元表現を生成するのに適していることを特徴とする。  (もっと読む)
(もっと読む)
立体物監視装置

【課題】簡単な方法で監視すべき立体物を絞り込むことが可能で、その絞込みにより計算負荷を低減することが可能な立体物監視装置および立体物監視方法を提供する。
【解決手段】立体物監視装置1は、立体物までの距離を計測する距離計測手段2と、距離計測手段により得られた立体物までの距離の分布から立体物までの距離データを求め、距離データを複数のグループに分け、各グループ毎に立体物の位置および速度を算出するグループ化手段3と、立体物のパラメータとして、立体物が周囲の立体物に対して相対的に距離計測手段側に突出している度合を数値として算出する突出度合算出手段3とを備える。
(もっと読む)
画像処理装置および画像処理方法

【課題】遠景や近景といった画像に写し出された景色に左右されず、無限遠におけるオプティカルフローを推定する。
【解決手段】ステレオカメラ(カメラ2,3)は、移動体に搭載されており、移動体周囲の景色を撮像することにより、一対の画像データを時系列的に出力する。ステレオ画像処理部7は、一対の画像データを処理対象とした二次元マッチングに基づいて、視差dを算出し、これにより、距離データDを出力する。認識部11は、距離データDに基づいて、複数の立体物Onを認識し、立体物Onのそれぞれの三次元位置を特定。検出部12は、一対の画像データのうちの一方の画像データにおいて、時系列的な前後関係にある一対の画像データを処理対象とした二次元マッチングに基づいて、立体物のそれぞれのオプティカルフローOFを検出する。そして、演算部13は、複数の立体物Onの並びと、それぞれの立体物Onの視差dとオプティカルフローOFとに基づいて、無限遠におけるオプティカルフローOFinfを推定する。
(もっと読む)
物体検出装置
【課題】 演算量を低減する物体検出装置を提供することを課題とする。
【解決手段】 互いに視点の異なる複数の撮像画像を出力する撮像手段と、互いに視点の異なる画像間の対応付けを行う対応付手段とを備え、対応付けによって得られる視差から物体を検出する物体検出装置において、撮像画像を低解像度画像に変換する解像度変換手段と、低解像度画像による対応付けで得られた各対応点の視差が所定の視差以下か否かを判定する判定手段とを備え、高解像度画像による対応付けを行う場合、低解像度画像による対応付けで得られた対応点の位置に対応する高解像度画像の位置の近傍を探索範囲として設定して高解像度画像における対応付けを行い、判定手段により対応点の視差が所定の視差以下と判定した場合、対応点の視差が所定の視差より大きいと判定した場合より探索範囲における視差が少ない方向に対応する範囲を小さく設定することを特徴とする。
(もっと読む)
算出装置及び車椅子
【課題】 移動体の現時点の正確な位置及び向きを算出すること。外部システム等を必要とせずに、移動体単体において自律的に現時点の正確な位置及び向きを算出すること。
【解決手段】 制御装置140は、光学センサ100a、100bの各検出値を所定の変換係数に従って車椅子1の前後方向への移動変位量に変換し、これらに基づいて車椅子1の走行面に対する位置変位量及び向き変位量を算出する。そして、制御装置140は、算出した位置変位量及び向き変位量を予め定義された基準位置及び基準向きに加算していくことで、車椅子1の現時点の位置及び向きを算出する。さらに、制御装置140は、無線タグ読取装置120から入力された設置位置データに基づいて、当該時点での車椅子1の絶対位置を特定・補正するとともに、前記所定の変換係数を補正する。
(もっと読む)
テラヘルツ画像処理システム及び方法
特定な成分の存在を判定するために、関心領域を急速に、そして効果的に検査するための、THz画像処理装置及び方法を提供する。この装置は、試験に適した所望のテラヘルツ周波数の電磁放射を発生させるための手段、そして関心領域に入射する放射をレンダリングするための手段を含む。領域から反射する、あるいは領域を透過するテラヘルツ放射を検出するために、関心領域から間隔を置いた平面内の複数の点に検出器手段を設ける。そして、特定な成分の存在が確定可能なよう、検出テラヘルツ放射を関心領域の画像へ変換するための手段を設ける。 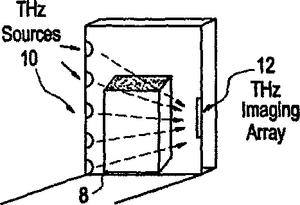 (もっと読む)
(もっと読む)
画像処理装置
【課題】 道路上の撮影画像から、より精度良く車両認識を行うことが可能な画像処理装置を提供する。
【解決手段】 画像処理部は、車両の撮影画像を基に特徴画像作成部51で作成された特徴抽出画像を垂直・水平特徴コード化部54で垂直方向及び水平方向に特徴をコード化し、この特徴抽出データについて、車幅条件の車両判定値に基づいて幅小データ等を水平特徴結合部61で結合するとともに、幅大データを幅大データ分離部62で分離して補正する。その後、車両認識部66で特徴補正データによって車尾検出、車長算出、車体確定を行う。また、背景差分画像作成部52で作成されたライト検出用の背景差分画像を用いて、ライト検出を行って車尾位置を算出する。そして、車尾確定部69において、車体解析とライト解析によるそれぞれの車尾の検出結果を統合し、車尾位置を確定する。
(もっと読む)
画像処理装置
【課題】 周囲環境の変化にも対応でき、道路上の撮影画像から安定して車両抽出を行うことが可能な画像処理装置を提供する。
【解決手段】 画像処理部は、車両の撮影画像として画像入力部21より入力された現在画像、ΔT前画像、2ΔT前画像とともに、微分画像作成部31で作成されたこれらの微分画像、背景画像作成部32で作成された背景画像を用いて、画像間減算部33及び画像間論理積演算部34により、微分背景差分、背景差分、フレーム差分、微分フレーム差分の4つの方式による特徴抽出処理を行う。そして、各方式で得られた画像を画像二値化部35で二値化した後、各方式で得られた画像に対して二値化画像重み付け部36で撮影環境に応じた重み付けを行い、画像間加算部37で加算して合成することで、特徴抽出画像を生成し、特徴画像格納部30に格納する。
(もっと読む)
運転支援装置
【課題】 自車両周辺の状態をユーザにわかりやすく提示できる運転支援装置を提供する。
【解決手段】 車両の周囲の全方位を分担して広角撮影するように配置された複数のカメラ101〜104と、複数のカメラで広角撮影することにより得られた複数の広角画像を歪みのない複数の平面画像に変換するパノラマ変換部11と、パノラマ変換部で変換することにより得られた複数の平面画像の視差に基づき被写体までの距離を反映した視差画像を生成する視差計測部12と、視差計測部で生成された視差画像に基づき車両およびその周囲を上空から見た空間地図を生成する空間地図生成部13と、空間地図生成部で生成された空間地図を表示する表示部21、22とを備えている。
(もっと読む)
平面検出装置及び検出方法
【課題】平面を規定する法線ベクトル及び基準とする撮像手段から平面までの距離を高精度且つ短時間で算出する。
【解決手段】基準カメラ12及び参照カメラ14間の回転行列及び並進ベクトルをパラメータ記憶部26から読み出し、射影変換行列算出部28において射影変換行列を推定した後、平面パラメータ算出部30において、射影変換行列を特異値分解して得られる射影変換行列の定数倍の不定性を示す係数と、前記回転行列及び前記並進ベクトルとを用いて、平面を規定する法線ベクトル及び基準カメラ12から平面までの距離を算出する。
(もっと読む)
画像生成方法および装置
【課題】 撮像対象物までの距離が遠近いずれの場合にも鮮明な画像として撮像し、視点変換処理した場合でも像の歪みの極めて小さい空間モデルを貼り付けた変換画像を構成する。
【解決手段】 車両に配置された1又は複数の撮像手段から供給される画像情報と、空間モデルに基づいて視点変換画像を生成する画像生成装置である。前記撮像手段をステレオカメラユニット12で構成するとともに前記ステレオカメラユニット12対の組合せステレオカメラによる長基線長撮像を可能とする撮像カメラ切替手段を有し、空間モデルをその遠近情報より近距離空間モデルであるか遠距離空間モデルであるかに応じて短基線長撮像手段による画像情報と長基線長撮像手段による画像情報により更新するに際し、前記長基線長撮像手段による画像情報は対のステレオカメラユニット12の左右もしくは上下の異なる側の片側視野画像情報を用いて取得する。
(もっと読む)
運転支援装置及び運転支援方法
【課題】右左折や車線変更の際の他車との位置関係を容易に判断でき、運転者の目視による確認を十分に補助することができる運転支援装置及び運転支援方法を提供する。
【解決手段】カメラ10で自車両の側後方を撮影し、画像処理部11で、カメラ10の撮影により得られた画像を基に自車両からの後方の距離を検出し、検出した距離に基づいて右左折時と車線変更時の車両の運転を支援するためのガイド線を生成し、表示制御部12が、生成されたガイド線をカメラ10による画像に重畳させてモニタ13に表示する。これにより、運転者は、右左折又は車線変更の際の他車との位置関係を容易に判断することが可能となる。
(もっと読む)
移動物体を検出するシステムとその方法
【課題】一般道路走行中の車両で取得した画像情報を処理して、前方車や追い越し車などの移動物体の検出を可能にする。
【解決手段】本発明によるシステムは、連続撮像手段A(カメラ)、画像出力手段B、背景領域識別手段C、水平エッジ検出手段Dおよび移動物体検出手段Eから構成されている。本発明による移動物体検出方法では、背景領域検出ステップを設け、オプティカルフローを用いて、前記画像データから動きの消去点を利用して背景領域を検出する。移動物体領域候補(背景でない部分)でオプティカルフローと水平エッジ検出の両方の視点から移動物体を検出する。
(もっと読む)
画像処理方法および画像処理装置
本発明の画像処理方法においては、基準画像と参照画像とを用いたステレオマッチングによって対象物の形状を復元するにあたり、基準画像および参照画像に対して、それぞれ所定の相関関係に基づいて対応付けされた複数のウィンドウを設定する。このとき、参照画像に設定されたウィンドウの並び順を基準画像における複数のウィンドウの並び順と一致させるように、参照画像における複数のウィンドウの並び順を修正する。並び順に基づいてマッチングの修正を行うため、基準画像と参照画像との間のステレオマッチングを容易に行うことができ、画像処理時間の短縮を図ることが可能となる。  (もっと読む)
(もっと読む)
平面検出装置及び検出方法
【課題】平面を検出するための画像間の射影変換行列を高精度且つ短時間で算出する。
【解決手段】基準カメラ12及び参照カメラ14間の回転行列及び並進ベクトルをパラメータ記憶部26から読み出し、射影変換行列算出部28において、前記回転行列及び前記並進ベクトルを用いて、基準カメラ12及び参照カメラ14によって撮像された画像に含まれる道路平面領域を重畳させることのできる射影変換行列を算出する。
(もっと読む)
移動体周辺監視装置
【課題】ステレオ画像に基づいて物体を検出する際、計算時間の短縮と計算コストの低廉化を図る。
【解決手段】基準カメラ12により基準画像Ibを撮像し、参照カメラ14により参照画像Irを撮像する。基準画像Ib及び参照画像Irから平面領域Πfを抽出する。基準画像Ibからエッジや特徴点を抽出したエッジ画像を作成し、平面領域Πfを除去した修正エッジ画像62を生成する。修正エッジ画像62のエッジや特徴点に対して参照画像Irを参照しながら物体検出処理を行う。
(もっと読む)
移動体移動量算出装置
【課題】移動体と静止物とが混在する環境下において、移動体の速度を正確に計測をする。
【解決手段】基準カメラにより基準画像を撮像し、参照カメラにより参照画像を撮像する。基準画像及び参照画像から車両が走行する平面領域を抽出する。基準画像を用いて道路を上方から見たVPP画像IVを及び平面領域を上方から見たVPP平面画像IVfを生成する。異なる時刻間でのVPP画像IV(t)、IV(t-1)のうち平面の共通領域R(ΔX、ΔY)の範囲でVPP画像マッチングを行い、求められたずれ量から移動量を算出する。
(もっと読む)
画像生成方法および装置
【課題】 暗所の撮影や夜間撮影時に視点変換画像の合成対象撮像手段が撮像する際に効率的に必要な補助光を照射でき、認識度の高い視点変換画像を生成する。
【解決手段】 車両に配置された1又は複数の撮像手段から供給される画像情報に基づいて視点変換画像を生成する画像生成装置である。前記撮像手段による撮像領域を照射する補助光源を備え、この補助光源を視点変換画像毎に切り替えて使用する補助光源を選択する制御手段を設けた。
(もっと読む)
車両撮影方法およびその装置
【課題】 従来の運転席を含む領域を運転者の顔が判別可能なまでに一様に増幅した場合には、明るい色の車両の塗装面がハレーションを起こして車両の形状が認識できなくなるといった問題があった。
【解決手段】 車両の前面を撮影した画像に対してナンバープレートを含む領域は原画像を残し、該ナンバープレートを含む領域より上方の領域は原画像における低輝度の画素の輝度値を高める輝度変換処理を行うことでナンバープレートと運転者の顔を明瞭にしたことを特徴とする車両撮影方法である。
(もっと読む)
障害物検出装置及び方法
【課題】平面投影ステレオ法の、対応点探索を必要としなく、計算量上の実用性を維持しつつ、誤検出が生じる可能性を大幅に減少させる障害物検出装置を提供する。
【解決手段】走行車搭載のビデオカメラにより入力された左右の画像に基づいて道路面上における左右の画像の任意の点の対応関係を表すパラメータを求めるパラメータ計算部と、パラメータに基づいて、一方の画像の道路面上に設定された点が、他方画像上のどの点に対応するのかを計算する対応点計算部と、計算される点の対応関係を用いて一方画像に近似する変換画像を作成する画像変換部と、計算される対応点の対応関係及び変換画像を用いて、道路平面に対して実質的に垂直上方向に一定以上の大きさを有する物体を検出する検出部を含む。
(もっと読む)
2,561 - 2,580 / 2,648
[ Back to top ]