
Fターム[5B057AA16]の内容
Fターム[5B057AA16]に分類される特許
2,621 - 2,640 / 2,648
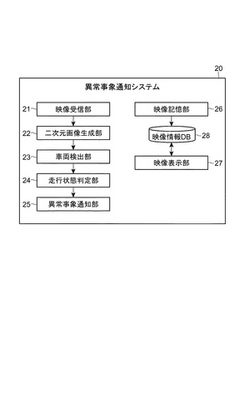
異常事象通知システムおよび異常事象通知方法
【課題】 監視カメラの撮影範囲外で異常事象が発生した場合、監視カメラの撮影範囲内で規模の小さな異常事象が発生した場合や照明設備がない場所で夜間に異常事象が発生した場合であっても異常事象の発生を検出させる。
【解決手段】 異常事象通知システム20の二次元画像生成部22は、映像受信部21により受信された映像に基づいて二次元画像を生成する。車両検出部23は、複数の二次元画像から車両に対応する車両画像を検出する。走行状態判定部24は、検出された車両画像に対応する車両が、異常事象発生時に特有の走行状態にあるか否かを判定する。異常事象発生時に特有の走行状態にあると判定された場合に、異常事象通知部25は、異常事象が発生した旨をユーザ端末30にメールで通知する。
(もっと読む)
障害物認識方法及び障害物認識装置

【課題】ミリ波レーダ等の探査結果を利用することなく、撮像装置の自車前方の撮影画像から自車前方の衝突の可能性がある停止中の先行車等の静止状態の障害物を、自車の走行状態による誤認識が生じないようにして、確実に認識する。
【解決手段】自車1に搭載された単眼カメラ(撮像装置)3の自車前方の撮影画像の垂直エッジのヒストグラムを算出し、このヒストグラムのピーク点の軌跡のトラッキング画像を形成し、自車1の旋回半径から自車1の直進走行状態を検出したときに限り、前記ピーク点の軌跡の車幅方向の広がりの時間変化特性から衝突予測時間を算出し、この衝突予測時間に基づいて自車前方の衝突可能性がある静止状態の障害物を認識する。
(もっと読む)
道路標識認識装置
【課題】 CPU、撮像装置の能力、コストを抑制し、車両へ現実的に搭載でき、確実に道路標識を認識することができる道路標識認識装置を提供すること。
【解決手段】 自車前方を撮像するステレオカメラ5と、撮像した画像を撮像対象までの距離を示す距離画像に変換する距離画像作成部21と、撮像した画像から道路標識部分を認識するデータ探索部42と、複数の道路標識のデータを有するテンプレートデータと、画像の道路標識部分とテンプレートデータとのマッチングを行い、道路標識を認識する画像判定部44とを備える道路標識認識装置1において、自車と道路標識との距離により段階的にテンプレートサイズを変更するテンプレート拡大縮小部44を設け、画像判定部44は、自車と道路標識との距離により段階的に認識処理を行う。
(もっと読む)
ナビゲーションシステム
【課題】 交差点の近傍において自車のナビゲーション装置の表示部に表示される無駄な情報を削減して運転者の混乱を抑えることができ、ひいては安全で円滑な運転を行わしめることができる「ナビゲーションシステム」を提供すること。
【解決手段】 ナビゲーション装置8は、対向車線上の対向車両7を検出可能とされた検出手段5が、対向車線上に対向車両7を検出した場合に、監視カメラ3が撮影した画像を表示部15に表示する。
(もっと読む)
先行車両水しぶき認識装置
【課題】 前方の車両が水しぶき等を巻き上げて走行していることを確実に認識できる先行車両水しぶき認識装置を提供すること。
【解決手段】 自車の前方の画像を取り込むカメラ4及び画像メモリ2、画像取り込み部31と、画像の輝度分布から減色閾値を設定し、取り込んだ画像を4色の画像に減色する変換処理を行い、減色させた画像の段階的変化から自車前方の車両が水しぶきや、雪煙を巻き上げて走行していることを判断するプロセッサ3を備えた。
(もっと読む)
ナンバープレート認識装置
【課題】 色情報と形状情報を併せて判断することにより、効率よくナンバープレートを抽出して処理でき、テンプレートデータを予め準備するようなことなく処理の負担を軽減できるナンバープレート認識装置を提供すること。
【解決手段】 自車前方に撮像するカメラ2と、撮像した画像を色の濃淡差を示す濃淡差画像に変換する濃淡差画像生成部3と、濃淡差画像におけるナンバープレートの地部分と一連番号との濃淡差により、ナンバープレートの一連番号領域を抽出する一連番号領域抽出部4と、抽出した一連番号の桁数からナンバープレート領域を判断するプレート領域抽出部5、ナンバープレート判定部6とを備えた。
(もっと読む)
カメラ・ポーズを決定する方法および装置
(例えばコンピュータ・ビジョン・システムで使用される)6つの自由度で特徴付けられるカメラ・ポーズを決定する方法および装置が開示される。一実施形態では、カメラでキャプチャされたイメージが受領され、潜在的ポーズに関する少なくとも2つの制約が、カメラに対するイメージの既知の関係に従って実施され、それによって潜在的ポーズが、残りの2つの自由度に制限される。次いで、少なくとも1つの潜在的ポーズが、その残りの2つの自由度に従って決定される。 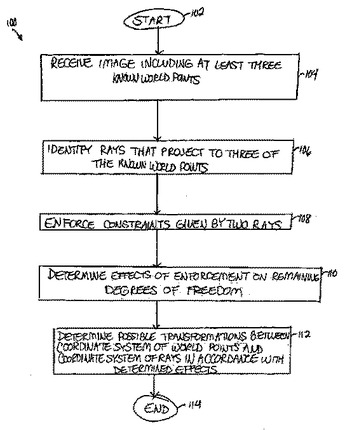 (もっと読む)
(もっと読む)
画像処理方法及び手段
本発明は、一般に画像処理に関し、特に、飛行及び航空輸送と、陸上輸送と、船舶輸送と、潜水作業と、水中検査と、医療調査と、海洋考古学と、陸上考古学と、農業と、監視及びセキュリティと、食品安全と、エネルギーシステムと、林業のような広範囲の用途について、カラー画像中の物理的な物体表現の人による検出を容易化する方法及び手段に関する。本発明は、カラー画素マトリクス毎に別々に実行されるヒストグラム等化処理ステップ(250)を実行することにより、少なくとも2個の別個のカラー画素マトリクスMiによって形成されたカラー画像表現Icのための画像処理方法を提供することによってこれを実現する。種々の前処理がヒストグラム等化処理ステップ(250)より前に適用される。本発明は、本発明による方法を使用して種々の用途に適した多数のデバイスをさらに提供する。 (もっと読む)
視覚障害者追跡システム及び視覚障害者検出方法
【解決手段】道路の対向位置にそれぞれカメラ2a,2bを設置して、その道路を渡る視覚障害者の追跡を行う。各カメラ2a,2bの視野は、互いに道路の対向側を監視し、かつ、道路の真中で重複した状態に設定されており、各カメラ2a,2bの画像処理部は、当該カメラに写った画像の中で、輝度の高い線分の検出を行い、前記線分が検出された場合に視覚障害者の白杖とみなし、当該視覚障害者の特徴情報に基づいて当該視覚障害者を追跡し、その追跡している視覚障害者の特徴情報を他のカメラの画像処理部に渡す。
【効果】道路をこちらに向かって渡って来る視覚障害者が白杖を持っていれば、それを正面から確実に検出できる。その視覚障害者の色、大きさなどの特徴情報を捉えて、当該視覚障害者を追跡することができる。当該視覚障害者が道路の半ばを越えてくると、その追跡している視覚障害者の特徴情報を他のカメラの画像処理部に渡すことにより、当該他のカメラは、白杖を検出できなくても、その特徴に基づいて当該視覚障害者を背後から、横断完了まで追跡し続けることができる。
(もっと読む)
撮像制御装置及びプログラム
【課題】 エネルギーの浪費を抑制し、常に最適な撮像が可能な撮像制御装置及びプログラムを提供すること。
【解決手段】 ステップ110では、メイン投光器3により近赤外光を照射し、ステップ120にて、メインカメラ1により撮像を行う。ステップ130では、サブ投光器7により近赤外光を照射し、ステップ140では、サブカメラ5により撮像を行う。ステップ160では、顔位置を検出する。即ち、メインカメラ1及びサブカメラ5の画像を用いて、三角測量の原理を利用して、顔との距離を求める。従って、2回目からは、各カメラ1、5と顔との距離に応じて、メイン投光器3から照射する近赤外光の好ましい投光量(従ってメイン投光器3のパワー)を算出する。
(もっと読む)
車両用右左折支援装置
【課題】 交差点ごとにインフラ整備を行うことなく、車両に搭載したシステムのみにより右折先または左折先横断歩道上の歩行者との接触を防止する。
【解決手段】 撮像手段による撮像画像を処理して右折先の横断歩道を横断する歩行者の存在を検出するとともに、すれ違う対面車両の通過を待っている右折待ちの状態にあるか否かを判定し、車両が右折待ち状態にあると判定され、かつ歩行者が検出されている場合に、運転者の車両を発進させる意志が検出されたときは警告を行う。
(もっと読む)
パンタグラフのすり板検査装置。
【課題】
従来のカメラによるパンタグラフすり板の検査では、すり板側面の照明を当ててパンタグラフを撮像していたが、この方法では、すり板上面と側面を高精度に分離することが難しかった。
【解決手段】
カメラでパンタグラフを撮像する際に、パンタグラフすり板上面を照射するストロボ照明と、パンタすり板側面を照射するストロボ照明を設け、すり板上面を照射するストロボ光に比べてすり板側面を照射するストロボ光の光量を少なくして撮像する構成とした。
(もっと読む)
通過車両をダイナミックなバックグランドから頑強な情報フュージョンを使用して検出するための装置および方法
通過車両を検出するための装置および方法が開示される。複数の画像フレームを含みビデオシーケンスが受信される。画像強度が測定され、画像の動きが各画像フレームで評価される。バックグランドダイナミクスを表す仮説が定式化される。測定された画像強度と動き評価は、バックグランドダイナミクスが所定の画像フレームで妨害されているか否かの決定に使用される。バックグランドダイナミクスが妨害されている場合、バックグランドダイナミクスの妨害が通過車両によって引き起こされているか否かの決定に動き一貫性が使用される。  (もっと読む)
(もっと読む)
物体検出装置、物体検知方法、およびコンピュータプログラム
【課題】目標物の検出を行う際に撮影環境などに変化が生じても、処理速度をあまり低下させることなく当該検出を正確に行う。
【解決手段】画像の中から人を検出する人体検出装置1に、カメラで撮影されて得られた画像FGを入力する画像入力部101と、互いに異なる方法を用いて、画像FGの特徴を検出する複数のプレーン生成部301〜304と、カメラの撮影に関する事項の条件を取得する手段と、取得された条件の場合の、プレーン生成部301〜304によって検出される特徴の信頼性を求める手段と、1つまたは複数のプレーン生成部301〜304によって撮影画像からそれぞれ検出された特徴および各特徴の信頼性に基づいて撮影画像に写っている人を検出する検出処理部105と、設ける。
(もっと読む)
車両周辺部を可視化するための方法及び装置
車両周辺部を可視化するための方法、特に暗視情報システムを用いて運転者の前方にある交通状況を検出及び描写するための方法であって、異なるスペクトル領域から殆ど同所同時のビデオ画像が融合され、ビデオ画像の融合時、異なるスペクトル領域に重み係数が備えられる、前記方法において、第1にビデオ画像が全域的に調節された予備的な重み係数で重み付けられること、第2に対象認識システムを使ってビデオ画像の対象分析が実施されること、及び第3に対象分析に基づいて重み係数の対象選択式の局所的な適合が行なわれること。 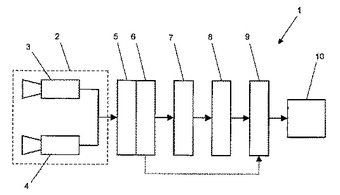 (もっと読む)
(もっと読む)
監視装置
監視装置は、カメラ(101)で撮影された全体画像をフレーム毎に受けて全体画像に対してフレーム間差分処理、又は事前に用意された背景画像との背景差分処理を行う移動体画像生成部(102)と、差分処理された画像(移動体画像)を1次元情報に変換し、周波数分析を行って、移動物体または群衆の密集の度合いを示す密集度を算出する密集度算出部(103)と、所定日時の密集度に基づいて移動物体又は群衆の基準密集度(モデル値)を算出するモデル生成部(104)と、現時刻における密集度と基準密集度との比較を行って、現時刻における密集度が基準密集度と異なるか否かを判断して判断結果を生成して報知部(107)に与える状況判断部(106)とを備える。  (もっと読む)
(もっと読む)
移動体動き算出方法および装置、並びにナビゲーションシステム
移動体動き算出装置(100)において、対応点算出部(101)はカメラ120によって撮影された画像間の対応点を算出する。第1の動き算出部(102)は画像内に所定の平面を仮定して、対応点を用いて移動体の第1の動き(Ma)を算出する。第2の動き算出部(103)は第1の動き(Ma)と対応点を用いて、第2の動き(Mb)を算出する。  (もっと読む)
(もっと読む)
低照度の深度に適応可能なコンピュータ視覚を用いた移動物体検出
移動物体検出は距離又は深度情報を含む低照度画像に基づいている。視覚システムは、並進運動が支配的で少量の回転運動を伴うプラットフォーム上で動作する。運動が背景の移動と一致しない移動物体の検出は、形状に基づいたアプローチを補足する。低照度でのコンピュータに基づいた視覚支援では、同時およびその次のフレームブロブの対応を求めるために二段階技術が用いられる。平均風景視差を用いることにより、陽にエゴモーションを計算することなく、運動が検出される。これらの技術は、熱放射物体がホットスポットとして現れる赤外感光ビデオデータの特性を利用する。 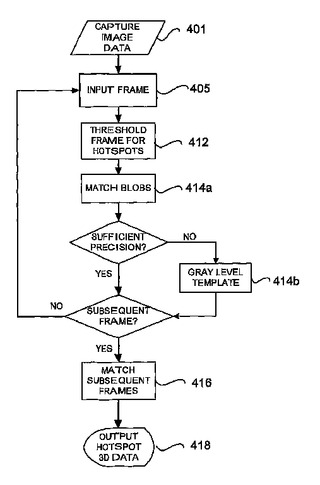 (もっと読む)
(もっと読む)
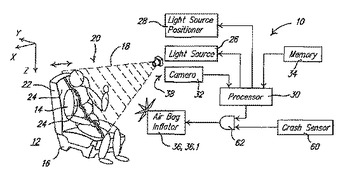
乗員検出システム
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
車両システム
両システムを操作する操作装置と、操作装置を介する車両システムの操作を制御する制御部とを備えた自動車における運転のための車両システムにおいて、操作装置への操作アクセスが車両ドライバにより行われるか、車両の他の乗員により行われるかを識別するために構成されている装置が設けられおり、制御部は操作装置を介する車両システムの操作を少なくとも、操作装置への操作アクセスが車両ドライバにより行われるか、車両の他の乗員により行われるかに依存して制御するよう構成されていることを特徴とする、車両システムが提案される。独立請求項の特徴を備えた本発明による車両システムは、車両システムに車両ドライバがアクセスするか、その他の車両の乗員がアクセスするかに依存して操作が制御されるという利点を有する。したがって、車両ドライバを本来の運転任務から過度に注意を逸らさせる可能性のある操作アクセスは効果的に阻止される。しかしながらそれと同時に車両システムはその他の車両乗員に対して少なくとも広範に操作可能のままであるか、完全な範囲で操作可能のままである。  (もっと読む)
(もっと読む)
2,621 - 2,640 / 2,648
[ Back to top ]