
Fターム[5B057AA16]の内容
Fターム[5B057AA16]に分類される特許
2,481 - 2,500 / 2,648
画像処理装置、および方法
【課題】 撮像画像の消失線を検出し、消失線がモニタの中央となるように画像位置を補正すること。
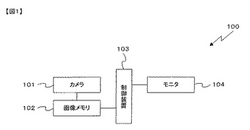
【解決手段】 制御装置103は、カメラ101で撮像した自車両前方の画像の画像速度を算出し、算出した画像速度に基づいて、画像上に設定した各検出領域内における速度の分散値を算出する。算出した速度の分散値の絶対値が所定の閾値以下となる1つの検出領域を抽出して、抽出した検出領域を消失線として検出する。そして、検出した消失線がモニタ104の垂直方向中央と一致するように画像の表示位置を補正する。
(もっと読む)
画像認識システム、及び画像認識結果出力方法

【課題】 撮像した画像データにて認識された認識対象物を、実在する位置及び方向に即して表示することができる画像認識システム、及び画像認識結果出力方法を提供する。
【解決手段】 車両の外部を撮像する撮像装置と、該撮像装置で撮像した画像データを通信手段を介して取得し、画像認識処理を行い、出力する画像データを生成する画像処理装置と、該画像処理装置で生成した画像データを取得して出力する出力装置とを備える画像認識システムにおいて、画像処理装置は、撮像装置から取得した画像データ中の認識対象物を認識する手段と、認識された認識対象物の実在する位置及び方向を推定する手段とを備え、出力装置は、認識対象物が実在する位置及び方向に対応する情報を、運転時の視界の範囲内で表示する手段を備える。
(もっと読む)
画像認識システム、画像認識方法及び画像処理装置
【課題】 撮像した車両の向きにかかわらず、撮像した画像データに基づいて、周囲を走行する車両の存在を認識することができる画像認識システム、画像認識方法、及び画像処理装置を提供する。
【解決手段】 撮像装置で撮像した画像データを取得して、画像認識処理を施し、処理結果に基づき出力する画像データを生成する画像処理装置を備える画像認識システムにおいて、画像処理装置は、撮像装置から取得した画像データ中に略水平方向の直線部分が存在する場合、略水平方向の直線部分が略鉛直方向の所定の間隔内に複数並んで存在するか否かを判断し、存在する場合、略水平方向の直線部分が略鉛直方向の所定の間隔内に複数並んで存在する部分にて、高輝度部分、低輝度部分、高輝度部分がこの順に存在するか否かを判断し、存在する場合、高輝度部分、低輝度部分、高輝度部分がこの順に存在する部分を含む領域を強調処理して外部へ出力する。
(もっと読む)
画像処理装置、および方法
【課題】 車両の振動に起因する撮像画像の変位量を算出すること。
【解決手段】 制御装置103は、カメラ101で撮像された撮像画像内で車両の振動に伴って画像内で上下に移動する移動成分を特定し、特定した移動成分の移動履歴に基づいて移動成分の振動周波数の強度を算出し、振動周波数の強度が最も高い振動周波数範囲を抽出し、抽出した所定の周波数範囲内における振動の平衡点で撮像された平衡画像を抽出し、抽出した平衡画像に基づいて、車両の振動によって変位する画像内の変位の中心位置である消失点を検出し、検出した消失点を監視して、各撮像画像における車両の振動に起因する画像の変位量を算出する。
(もっと読む)
スポット画像検出方法及びスポット画像検出プログラム
【課題】自動車をそれぞれ表す複数のスポット画像を含む解像度が低い撮像画像から、所望の車輛占有範囲と、屋根のような特定部分の所望の存在範囲とを有する自動車を表すスポット画像を簡単な処理で検出可能にする。
【解決手段】撮像画像から、その濃度が周辺の画素の濃度に対して極大値又は極小値のうちのあらかじめ定められた一方の極値である濃度を有する少なくとも一つの極値点画素を検出する。当該検出対象物に対してあらかじめ指定された最大占有範囲内の画素から、前記検出された極値点画素の濃度に対して濃度が単調変化関係にある一群の単調変化画素を検出する。検出された極値点画素と当該極値点画素に対して検出された前記単調変化画素群とを含む極値領域が所定の条件を満たすか否かに応じて、当該極値領域が前記検出対象物に対するスポット画像を表す領域であるか否かを判定する。
(もっと読む)
画像データの生成方法、画像データ、画像処理装置、画像処理プログラム及び画像データ生成システム
【課題】 移動しながら連続的に撮像された複数のフレーム画像の全部又は一部に撮像位置の情報が関連付けられた位置情報付き画像情報に基づいて、複雑な画像処理を用いず誤りの少ない処理により、認識が容易な画像データを生成することができる画像データの生成方法等を提供する。
【解決手段】 移動しながら連続的に撮像された複数のフレーム画像に撮像位置の情報が関連付けられた位置情報付き画像情報を取り込む画像情報取り込み工程と、前記複数のフレーム画像から各フレーム画像内の一定の位置に設定された切出領域の画像を切り出す切出処理工程と、複数の前記切出領域の画像を、当該切出領域の画像が切り出された元のフレーム画像に関連付けられた前記撮像位置の情報に基づいて連続的に配列して画像データを生成する画像配列工程と、を備える。
(もっと読む)
画像処理装置、画像処理システム及び画像処理方法
【課題】実際に仮想視点から見た映像と共通するように視点変換処理を行う。
【解決手段】撮像装置200により撮像された対象物の画像データを取得する画像データ取得部10と、測距装置300により測距された撮像装置200から対象物までの測定距離を取得する測定距離取得部20と、撮像された画像データを予め設定した2以上の基準座標に投射し、基準座標における画素ごとの投射座標値を算出する投射部30と、撮像装置200の高さ情報と、取得された測定距離とに基づいて、対象物の高さ成分を画素ごとに抽出する高さ成分抽出部40と、高さ成分と各投射座標値とに基づいて、撮像された画像データの視点変換処理を画素ごとに行う視点変換処理部50と、視点変換処理後の各画素データの有無を判断し、画素データのない画素を陰領域として特定するとともに、陰領域の画素に他の領域と識別可能なデータを補完する画像編集部60とを有する。
(もっと読む)
車両用画像生成装置および方法
【課題】車両に設けられた複数のカメラの画像を処理して視点変換した一つの画像を生成する車両用画像生成装置において、画像処理時に飛ばされたピクセルが生じることによる画像情報の欠落を低減する。
【解決手段】再配置テーブル207の再配置データ内容に基づいて入力ピクセルデータに対する出力ピクセルデータを演算する際に、再配置テーブル上の、連続した2つの再配置データに対応する入力用フレームバッファ203上の2つのピクセルデータ、つまり処理時間軸で隣接する2つのピクセルデータの位置から、所定の処理領域を決定し、該処理領域内の複数のピクセルデータから一つの出力ピクセルデータを求め、それを当該入力ピクセルデータに対する出力ピクセルデータとする車両用画像生成装置。
(もっと読む)
車両周辺認識システム及び画像処理装置
【課題】 車両の外界を撮像して障害物、歩行者などの車両周辺を認識する車両周辺認識システム及び該車両周辺認識システムを構成する画像処理装置を提供する。
【解決手段】 ECU2は、ビデオカメラ1aで撮像した1フレーム分の撮像画像に対して二次元フーリエ変換を行い、二次元フーリエ変換した撮像画像をECU3、4、5へ送信する。ECU2は、標準パターンH1、H2、…Hxを各ECU2、3、4、5に割当て、各ECU2、3、4、5において、二次元フーリエ変換後の撮像画像と標準パターンのフーリエ変換の共役複素数との積和演算(コンボリューション演算)、及び逆二次元フーリエ変換の演算を並列に行うことにより、各ECU2、3、4、5における演算処理量を分散する。
(もっと読む)
駐車支援装置
【課題】 白線等の駐車用の目印がなく、駐車すべき好適な位置を把握することが困難な場合においても、駐車に好適な位置を指示することによって、円滑で適切な駐車を支援することができる「駐車支援装置」を提供すること。
【解決手段】 表示部8に表示された駐車スペースの画像に基づいて、当該駐車スペースへの車両の駐車を支援可能とされた駐車支援装置1であって、前記駐車スペースの画像上に、当該駐車スペースにおける駐車位置を示すための擬似的な駐車線の画像を描画する駐車線描画手段7,9を有すること。
(もっと読む)
ドライバモニタシステムおよびその処理方法
【課題】 車両運転者の眼の位置を正確に検出することができ、カメラ設置位置の自由度の高いドライバモニタシステムを提供する。
【解決手段】 車両運転者の顔画像情報111を生成する画像取込手段10と、カメラ位置情報102および顔画像情報111に基づき、車両運転者の顔の部位を考慮して車両運転者の眼の位置を検出する眼の位置検出手段20と、カメラ位置情報102、顔画像情報111および眼の座標情報112に基づき、車両運転者の顔の部位を考慮して眼の座標情報112を元に顔画像情報111から車両運転者の眼の位置を検出して眼の座標情報を更新し、該眼の移動情報113を出力する眼の追跡手段30と、顔画像情報111、眼の座標情報112および眼の移動情報113に基づき、顔画像上に眼の座標と眼の移動情報を重ねて表示する表示情報121を出力する表示処理手段40とを備えて構成する。
(もっと読む)
車両運転支援装置
【課題】 周辺車両画像の歪みをなくして視認性を向上させることができる「車両運転支援装置」を提供すること。
【解決手段】 車両運転支援装置100は、自車両から路面を含む周辺を撮影するカメラ10と、カメラ10によって撮影された画像に基づいて路面投影を行って路面に投影した画像を生成する路面投影処理部20と、自車両の周辺に存在する他の車両を検出する画像認識処理部30と、路面投影処理部20によって生成された画像に含まれる他の車両の位置に他の車両を上空から見た車両画像を貼りつける画像補正処理部34と、画像補正処理部34によって補正された後の画像を自車両の車内において表示する表示処理部50、表示装置60とを備えている。
(もっと読む)
車両用警報装置、車両周囲状況の警報方法
【課題】 運転者が注視していない障害物に対する警報を報知すると共に、運転者が既に注視した障害物に対する再度の警報を回避する。
【解決手段】 視線検知部2により運転者の視線情報を検知し、車両状態検知部4により車両の走行状態を検知し、障害物検知部3により車両の周囲の障害物情報を検知して、注視対象判定部11により、運転者の視線情報と障害物情報とから運転者が注視した障害物を判定する。そして、非常可能性予測部12は、走行状態と障害物情報とに基づいて、障害物に対する車両の非常可能性を予測すると、非常可能性が予測された障害物情報と運転者が障害物を注視したか否かの情報とを記憶部13aに記憶しておく。警報制御部13は、記憶部13aで記憶された非常可能性が予測された障害物情報と、運転者が障害物を注視したか否かの情報とに基づいて、報知部5の警報制御を行う。
(もっと読む)
車両の視界補助装置
【課題】車両側方の前後を撮像可能な撮像手段による撮像画像を画像処理手段で処理して表示モニタに表示させるようにした車両の視界補助装置において、直接視界および間接視界と、撮像画像に基づく画像との間に死角が生じることを回避し、優れた視認性が得られるようにする。
【解決手段】撮像手段14Lが、運転席上の車両運転者による前方側の直接視界領域ならびにドアミラー12Lによる後方側の間接視界領域の一部を含んで前後に連続した領域を同時に撮像可能としてハウジングの下部に取付けられ、画像処理手段は、撮像画像のうち少なくとも前後の境界が直接視界領域の後縁ならびに間接視界領域の前縁と重なる領域を表示モニタに表示する。
(もっと読む)
物体検出装置、および物体検出方法
【課題】 車両のピッチングを検出して、ピッチングを考慮して自車両前方に存在する物体を正確に検出すること。
【解決手段】 マイコン3は、カメラ1で撮像した自車両前方の画像を画像処理して、撮像画像内に存在する物体の速度、および加速度を算出し、算出した物体の加速度に基づいて、撮像画像が自車両が平衡状態にあるときに撮像されたものであるか否かを判定する。そして、撮像画像が自車両が平衡状態にないときに撮像されたものであると判定されたときに、自車両が平衡状態にあるときに撮像された撮像画像に基づいて、撮像画像内に存在する物体の位置を算出する。
(もっと読む)
特定部位抽出プログラム
【課題】環境条件によらず、車両の色を判別すべき部位を正確に抽出すること。
【解決手段】画像蓄積サーバ100は、画像データ管理部110が、白黒画像データおよびカラー画像データを取得し、取得した各画像データを特定部位抽出処理部120に渡し、特定部位抽出処理部120が、カラー画像上の車両の特徴的な部分(ナンバープレート、サイドミラー、フロントミラー、ヘッドランプ等)を検出し、検出した部分を基にして車両の特定の部位(ボンネット領域、ルーフ領域、車両側面とドア領域、トランク領域等)を検出する。
(もっと読む)
車両運転支援装置
【課題】 車両に接触する可能性のある周辺の物体の存在を確実に知ることができる「車両運転支援装置」を提供すること。
【解決手段】 車両運転支援装置100は、自車両の路面を含む周辺を撮影するカメラ10と、撮影された画像に基づいて路面投影を行って路面に投影した画像を生成する路面投影処理部20と、自車両の周囲に存在する周囲物体の高さを検出する三次元映像センサ30、高低計測部32と、検出された高さと基準値とを比較する高低比較部34と、基準値よりも高さが高い箇所を危険箇所として検出する危険箇所検出部36と、路面投影処理部20によって生成された画像の中で危険箇所を強調する画像補正処理を行う画像補正処理部40と、画像補正処理部40によって補正された後の画像を表示する表示処理部50、表示装置60とを備えている。
(もっと読む)
画像処理方法及び画像処理装置
【課題】自車前方の撮影画像につき、自車の追従走行制御等に必要な重要度の高い画像から順に画像認識処理が行なえるようにしてその処理負担を軽減する。
【解決手段】自車前方のレーダ探索結果から自車前方の撮影画像に含まれた各物標の領域を検出し、各領域の画像につき、自車の走行状態から予測した自車の推定進路に近いものから順であって、かつ、自車に近いものから順に、優先順位が高い画像に選択し、画像認識処理の優先順序を決定することにより、全ての領域の画像に認識処理を施すことなく、重要度(注視度)の高いものから順に選択して画像認識処理を施すことができ、処理負担が軽減されて画像認識処理が短時間に迅速に行なえる。
(もっと読む)
移動体の自己位置同定装置および移動体の自己位置同定方法
【課題】特別な構造体やマーカを設置することなく移動体の自己位置を同定することが出来、そのための作業の負荷を軽減できる自己位置同定装置およびその同定方法を提供する。
【解決手段】移動体1に備えた全方位カメラ2と、周囲のエッジ位置情報を入力するデータ入力部3と、データ入力部3を介してエッジ位置情報を入力するコンピュータ4を備え、コンピュータ4は、エッジ位置情報を記憶するエッジマップ記憶部5と、全方位カメラ2からの視覚情報をもとにエッジを検出するエッジ検出部6と、エッジ検出部6からのエッジ情報をもとに移動体1の位置、姿勢を同定する演算部7を備え、撮像画像から周囲の柱や壁などの垂直成分エッジ8の方向を算出し、記憶したエッジマップ上から算出された方向でエッジが観測される位置及び姿勢を探索することで、移動体1の自己位置同定を行う。
(もっと読む)
車体撮像表示システム、それに関連する装置、方法、及びシステム
【課題】自車体の側方近傍を視認性良く表示する。
【解決手段】画像処理用ECU50は、カメラ1によって撮像された車体近傍の画像信号J1を入力する。画像処理用ECU50において画像処理用ASIC52は、所定の角度を示す角度情報Pを不揮発性メモリ54から入力する。そして画像処理用ASIC52は角度情報Pを用いて、画像信号J1から表示用画像信号J2を生成する。モニタ3は表示用画像信号J2を画像処理用ECU50から得て、これに基づいて車体近傍の画像を表示する。画像信号J1と比較して表示用画像信号J2では、モニタから認識される車体の延在方向と実際に車体が延在する方向とが、運転者から見て平行となる。
(もっと読む)
2,481 - 2,500 / 2,648
[ Back to top ]