
Fターム[5B057AA20]の内容
Fターム[5B057AA20]に分類される特許
2,201 - 2,220 / 2,761
画像読取装置

【課題】 この発明の課題は、縮小光学系あるいは等倍光学系(密着光学系)を用いる画像読取装置において、主走査方向の読取り領域を端部まで拡大することができる光学系を構成することにより、主走査方向の読取り領域の端部をコンパクトにする読取りユニットを備えた画像読取装置を提供することにある。
【解決手段】 縮小光学系を構成する結像レンズ及びイメージセンサを設けた読取ユニットを備える画像読取装置において、読取り原稿面と前記結像レンズまたは光路を折り返す反射面との間に配置し少なくとも一端を湾曲させて主走査方向における読取ピッチを拡大する介在物と、読取ピッチが拡大された拡大量に対応して読取り後に補間演算を行う補正手段とを備える。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム

【課題】 細線部分の消失や擦れの少ない縮小補完処理を高速に行うことが可能な画像処理装置、画像処理方法および画像処理プログラムを提供するものである。
【解決手段】 画像処理装置100は、原画像を縮小するものであり、PU102は、縮小画像における処理対象画素に相当する原画像の処理領域を導出し、縮小画像における処理対象画素の生成に参照される原画像の画素の制限数を設定し、分散型マトリクスに基づいて、原画像の処理領域の画素のうち、制限数の画素を選択して縮小画像を生成する。
(もっと読む)
補間回路および関数回路
【課題】 高速処理が可能な補間回路および関数回路を提供する
【解決手段】 補間回路1は、基本回路10a,10b、重合わせ回路20、入力端子30、および出力端子40を備えている。基本回路10aの出力は、入力変数xがx1(第1の入力値)からx2(第2の入力値)まで変化するとき、g(x1)(第1の出力値)からg0x(基準値)まで線形的に変化する。一方、基本回路10bの出力は、入力変数xがx1からx2まで変化するとき、g0xからg(x2)(第2の出力値)まで線形的に変化する。重合わせ回路20は、基本回路10a,10bからの出力を入力し、これらの重ね合わせを出力する。
(もっと読む)
文字図形表示装置、プログラムおよび記録媒体
【課題】文字または図形を表示可能な表示デバイスに文字または図形を滑らかに、かつ太く表示できる文字図形表示装置が提供される。
【解決手段】本発明の文字図形表示装置は、表示デバイスと表示デバイスを制御する制御部とを備え、複数の画素のそれぞれは、第1方向に配列された複数のサブピクセルを含み、制御部は、複数のサブピクセルに対応する複数の色要素をそれぞれ独立に制御することにより、文字または図形を表示デバイスに表示し、制御部は、骨格サブピクセル群のうちの1つのサブピクセルに隣接する第2サブピクセル群であって、第1方向に対して垂直な第2方向に並んだ少なくとも1つのサブピクセルを含む第2サブピクセル群の色要素レベルを第1サブピクセル群のうちの少なくとも1つのサブピクセルの色要素レベルに応じて設定する。
(もっと読む)
ノイズ検出回路及び同回路を有する信号処理装置及び同装置を備えた撮像装置及びノイズ除去方法
【課題】
画像データ中でインパルス性ノイズが混入した画素を的確に検出するノイズ検出回路と、インパルス性ノイズを的確に除去可能な信号処理装置及び同装置を備える撮像装置及びノイズ除去方法を提供する。
【解決手段】
画像データ中の対象画素の信号レベルと、この対象画素と垂直方向に隣接する画素の信号レベルとに基づいて、垂直方向ノイズ候補となる対象画素を検出する一方、対象画素の信号レベルと、この対象画素と水平方向に隣接する画素の信号レベルとに基づいて、水平方向ノイズ候補となる対象画素を検出し、これら垂直方向ノイズ候補と水平方向ノイズ候補との両方に該当した対象画素を検出し、この対象画素に対してのみメジアンフィルタを用いたノイズ除去を行うこととした。
(もっと読む)
表示装置、編集装置、及び、その編集方法
【課題】画像情報の取込と表示とが共通の装置で行え、スペース的にもコスト的にも優れ、また、無用な画像情報の転送もなく、適切な領域指定で編集を行う。
【解決手段】原稿読取装置1における制御は、オペレータによる制御方法入力部14とペン3による入力操作に基づいて制御部18によって実行される。画像取込機能付ディスプレイ11上にセットされた原稿2の画像データを読み込み、読み込んだ画像データを、画像取込機能付ディスプレイ11で表示する。この表示した画像データについてペン3による領域指定がある場合は、データ生成部15にて画像データを加工して領域データのみを表示させる。このペン3による領域指定が終了した場合には、メモリ16に表示したデータを保存する。
(もっと読む)
仮想視点画像生成方法及び3次元画像表示方法並びに装置
複数のカメラで撮影された複数枚の被写体の画像をもとに、仮想視点から被写体を見たときの画像である仮想視点画像を生成する仮想視点画像生成方法が提供される。この仮想視点画像生成方法において、多層構造をもつ投影面を設定し、前記投影面上の各投影点と対応する、前記各被写体の画像上の対応点を求め、複数の対応点の色情報に基づいて前記投影点の色情報を決定し、空間上のある基準視点から見て重なり合う複数の投影点について、前記各投影点の位置に相当する距離に前記被写体が存在する可能性の度合いを、前記対応点の相関の度合いに基づいて計算し、前記仮想視点から見て重なり合う基準点の色情報に対し、前記被写体が存在する可能性の度合いに応じた混合処理をして、前記仮想視点画像における各画素の色情報を決定する。  (もっと読む)
(もっと読む)
領域分割方法
【課題】 高速かつ高精度に撮像画像を領域分割可能な領域分割方法を提供することを課題とする。
【解決手段】 撮像した画像を所望の領域に分割する領域分割方法であって、視点の異なる複数の画像を撮像する撮像ステップと、複数の撮像画像を複数の領域に各々分割する分割ステップ(S10)と、複数の撮像画像の視点情報と分割した各領域の輪郭に基づいて分割した各領域のフロンティアポイントの候補を算出する算出ステップ(S14)と、複数の撮像画像のうちの任意の撮像画像における領域と複数の撮像画像のうちの他の撮像画像における領域とが共通して存在する領域か否かをフロンティアポイントの候補に基づいて判定する判定ステップ(S17)と、分割した2つ以上の領域を1つの領域に統合する統合ステップ(S18)とを含み、判定ステップにおける判定結果に基づいて領域を統合していくことを特徴とする。
(もっと読む)
画像情報取得装置、画像情報取得方法およびプログラム
【課題】複数の要因により生ずる反射光画像の歪みを容易に補正することができる画像取得方法及び装置を提供する。
【解決手段】撮像対象に光を照射する発光手段と、撮像対象からの反射光を受光する受光手段と、受光手段で受光された反射光の強度分布から撮像対象の3次元形状を表す反射光画像を生成する画像生成手段を含む画像取得装置で、反射光画像を得、撮像対象の理想的な3次元形状を示す理想画像に対する反射光画像の歪みを補正するための変換行列を用いて、得られた反射光画像の各画素値を補正する。画像取得装置で得られた反射光画像の各画素値が各行列要素に対応する行列の逆行列と、理想画像の各画素値が各行列要素に対応する行列とを乗算することにより変換行列を生成し、反射光画像の各画素が各行列要素に対応する行列と変換行列とを乗算して、当該反射光画像の各画素値を補正する。
(もっと読む)
電子透かしシステム
【課題】電子透かしにおいて読み取りエラーを低減する。
【解決手段】エラーマップ生成部14は、付加情報が埋め込まれる埋め込み対象画像に対し、ランダムに発生したテスト情報を埋め込んで電子透かし画像を生成し、その電子透かし画像からデータを復号して元のテスト情報と比較することにより、読み取りエラーの発生したビット位置を検出する。多くのテスト情報に対してこの検査を繰り返すことにより、統計的に読み取りエラーが発生しやすい位置を求める。エンコーダ12は、エラーが発生しやすいビット位置は避けて付加情報を配列し直し、この結果得られたビット配列を埋め込み対象画像に埋め込んで電子透かし画像を生成する。デコーダ34は、電子透かし画像からビット列を読み取り、そのビット列において、エラーが発生しやすい位置のビットを無視することで、付加情報を復元する。
(もっと読む)
モーションキャプチャ方法、モーションキャプチャ装置、及びモーションキャプチャ用マーカ
少数のマーカを用いて人体等の多関節体の構成要素の位置情報と角度情報を取得するために、多関節体の各構成要素が備える制約条件を利用し、少数のマーカから得られたある構成要素の位置情報から、この制約条件を満足するような他の構成要素の姿勢候補を抽出し、この姿勢候補と多関節体の画像との重ね合わせにより角度情報を取得する。 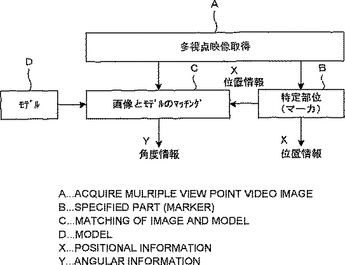 (もっと読む)
(もっと読む)
画像処理装置
【課題】 角度が45度近辺の斜線を常に一定幅で印刷でき、画質の高い印刷画像が得られるようにする。
【解決手段】 パス処理部3で座標の位置指定を行った線画のパス情報を、パス管理部4に渡し、パス管理部4でパス情報を記憶・管理する。45度線判定部5は、印刷すべきパス情報の中に斜線があった場合、その斜線が水平軸又は垂直軸から45度を中心として前後一定範囲内の角度を有するか否かを判定する。そして、一定範囲内の角度の斜線であれば、そのパス情報を45度線近似部6に渡す。45度線近似部6は、受け取った斜線のパス情報を全て45度の斜線に固定して線描画処理部7に渡す。そのようにして、水平軸又は垂直軸から45度を中心として前後一定範囲内の角度を有する斜線を全て45度の斜線として描画処理する。
(もっと読む)
眼画像撮影装置および認証装置ならびに誘導方法
【課題】被認証者が眼位置合わせを行う際、被認証者に所定の位置への移動方向をわかりやすく示して被認証者を誘導することができる。
【解決手段】眼画像撮影装置50は、レンズ部21と撮像素子22と前処理部23とを備えた撮影部20と、瞳孔検出部31と判断部32と認証画像取得部33とを備えた画像信号処理部30と、照明用LED62と照明制御部61とを備えた照明部60と、虹彩認証処理部40と、誘導鏡13と誘導用LED12とを備えた誘導部10とを備え、誘導用LED12は誘導鏡13の左右両端に配置された誘導用LED12R、12Lから構成され、撮影された眼画像内の瞳孔の位置が適切な位置にないと判断部32によって判断された場合に、そのいずれかが発光される。
(もっと読む)
画像処理方法及び装置及び記憶媒体
【課題】少ない処理負荷で確実に色かぶり補正を行う。
【解決手段】RGB画像データを輝度Y及び色度C1,C2に変換し、そのハイライトポイントとシャドーポイントとを求め、それらを結んだ色立体の軸lを得る。その軸が輝度軸Yと平行になるように回転変換し、さらに、最低輝度の画素が原点と一致するように、平行移動変換する。
(もっと読む)
画像形成装置
【課題】 偽造防止処理を解除するためのパスワードの安全性を高める。
【解決手段】 原稿を読取り、読取った画像データに特定画像データが含まれていると検出したときに、出力制御手段にて出力を禁止する画像形成装置に関する。前記出力制御手段にて出力を禁止したときのカレント情報を取得し、当該カレント情報に基づいてパスワードを生成する。前記出力制御手段にて出力を禁止したときの画像データを管理者に送信し、当該管理者の出力許可を得ると、前記パスワード生成手段にて生成したパスワードをユーザが認識不可能に埋め込んだ出力許可画像を生成して出力手段にて出力する。前記出力手段にて出力した出力許可画像を読取手段にて読取り、埋め込まれたパスワードデータを抽出手段にて抽出する。前記抽出手段にて抽出したパスワードと前記パスワード生成手段にて生成したパスワードと一致すると判定したときに出力の禁止を解除する。
(もっと読む)
擬似立体画像生成装置及び擬似立体画像生成プログラム並びに擬似立体画像表示システム
【課題】様々な画像に対して、消失点の決定を自動的に行うことは困難であり、また遠近法的な構造推定が適合する場合であっても自動的に正しい奥行き構造モデルを構成して違和感の無い立体視を実現させることは容易ではない。
【解決手段】どのような画像に対しても違和感を感じさせないと同時に、できる限り現実に近いシーン構造の決定を行うために、基本となる3種類のシーン構造のそれぞれについて奥行き値を示す3種類の基本奥行きモデルを用いる。上部の高域成分評価部2と下部の高域成分評価部3からの入力非立体画像の輝度信号の高域成分評価値の値に応じて合成比率8を決定し、その合成比率8に応じて3種類の基本奥行きモデルを合成する。加算器10において、合成した基本奥行きモデルと非立体画像のR信号9とを重畳して奥行き推定データ11を生成する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】 原本画像とそれに追記がなされた追記画像との間において、その追記内容から原稿作成時の時系列を認識することができる画像処理装置、画像処理方法および画像処理プログラムを提供する。
【解決手段】 この画像処理装置1は、原本に追記がされた原稿から追記画像を画像入力部2により光学的に読み取ると、抽出画像生成部4が画像格納部3に格納されている原本画像と追記画像から追記抽出画像を生成し、リンク作成部5により画像間のリンク情報を作成し、追記抽出画像をリンク情報とともに画像格納部3に格納する。
(もっと読む)
画像処理装置、画像処理方法、プログラム及び記録媒体
【課題】複写禁止文書等の出力規制文書に埋め込んだ「ドットパターン」を出力規制文書のスキャンデータ中から検出する事で出力規制文書のスキャンデータである事を判定する場合に関して、出力規制文書に埋め込んだ「ドットパターン」の検出精度を制御するための新規な手法を提案すること。
【解決手段】原稿から取得された画像を当該画像中のドットパターンを検出するための検出用画像に変換する変換手段と、前記画像中のドットパターンを前記検出用画像中から検出する検出手段と、前記画像中のドットパターンの検出結果に基づき前記画像の出力を制御する制御手段とを備える画像処理装置であって、前記変換手段の変換処理の変換パラメータとして、当該変換パラメータの値の設定内容に従って前記変換手段の変換内容が制御される事で前記検出手段の検出精度が制御されるような変換パラメータの値を、前記変換手段の変換処理に際して自動設定する設定手段を備えることを特徴とする画像処理装置。
(もっと読む)
ロボット装置
【課題】家庭環境のように照明条件が一定でない環境でも人物識別を可能とするロボット装置の提供。
【解決手段】画像を取得する映像取得手段と、画像中から人間の頭部を検出する頭部検出追跡手段と、検出された頭部の部分画像中から正面顔画像を取得する正面顔位置合わせ手段と、正面顔画像を特徴量に変換する顔特徴抽出手段と、識別辞書を用いて特徴量から人物を識別する顔識別手段と、識別辞書を保存する識別辞書記憶手段とを備え、を含む人物識別装置と、ロボットの動作を制御する全体制御部と、前記全体制御部の指示で音声を発話する音声出力手段と、前記全体制御部の指示でロボットを移動する移動手段と、を備える。
(もっと読む)
平面検出装置および方法並びに平面検出プログラム
【課題】 少ない処理量で、局所的な平面を見落としなく、正確な平面の境界を維持して、撮像画像中の平面を検出できる。
【解決手段】 画像入力手段11は、カメラ等の撮像装置で撮像された1枚の画像と、該画像の画素と前記画像とは異なる位置で撮像されたステレオ画像の画素との対応点座標を受信し、小領域分割手段12は、画像入力手段11から受信した画像を分割して小領域とし、各小領域に唯一のIDを付与し、小領域IDとして出力する。統合用小領域間距離値算出手段13では、小領域に分割された画像と対応点座標を受信し、2つの小領域が空間中の同一平面に属するかどうかを判定する統合用小領域間距離値を算出する。平面統合手段14は、算出された距離値と小領域ID、対応点座標を受信し、空間中の同一平面に属する小領域を統合し、最終的に平面に対応付けられた対応点座標を出力する。
(もっと読む)
2,201 - 2,220 / 2,761
[ Back to top ]