
Fターム[5B057CD14]の内容
Fターム[5B057CD14]に分類される特許
961 - 978 / 978
PCIエクスプレスを用いたグラフィックデバイスのクラスタリング

ブロードキャストアパーチャーに関連するブリッジがプロセッサと多数のグラフィックデバイスの間でレンダリングコマンド及びデータを転送することを容易にする。ブリッジは、プロセッサによりブロードキャストアパーチャーに書き込まれるデータを受けて、多数のグラフィックデバイスに転送し、プロセッサが書き込みオペレーションを重複して遂行する必要を排除する。システムの初期化中、システムコンフィギュレーションユーティリティを使用して設定されシステムコンフィギュレーションメモリに記憶されたアパーチャーサイズ値に基づき、アドレス空間においてブリッジにブロードキャストアパーチャーを割り当てる。グラフィックドライバは、多数のグラフィックデバイスに関連するユニキャストアパーチャーパラメータを、ブリッジドライバを介してブリッジへ送信し、ブロードキャストアパーチャーを有効にする。 (もっと読む)
画像の視覚化
医療画像化モダリティが、より一層増加的に、非常に大きな3次元データセットを生成する。本発明の例示的な実施形態によれば、注目対象の3次元データセットが、画像における変化するサンプリングレートで対話的に視覚化される。有利には、レンダリングの間に、フォーカス領域が、ユーザにより対話的に動かされることができ、そこでは、その画像における特定の部分のサンプリングレートがフォーカス領域に対する相対的な位置によって規定される。有利には、これは、全体のレンダリング性能の改良を可能にすることができる。  (もっと読む)
(もっと読む)
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
本発明の利点は、オブジェクトを適切に検出することである。本発明におけるオブジェクト検出装置は、オブジェクトまでの距離を決定する複数のカメラと、距離を決定する距離決定部と、ピクセルの距離に対するピクセル度数を特定するヒストグラム生成部と、最もありそうな距離を決定するオブジェクト距離決定部と、距離の差に基づくピクセルの確率を提供する確率マッピング部と、ピクセルのグループとしてカーネル領域を決定するカーネル検出部と、カーネル領域の近傍にあるピクセルから選択したピクセルのグループとして縁領域を決定する縁検出部と、オブジェクトが所定の確率で現れるオブジェクト領域を特定するオブジェクト特定部と、を有する。  (もっと読む)
(もっと読む)
断層撮影像の再構成方法及び断層撮影装置
体動の程度や冗長性などを考慮してユーザーが設定する任意の体動補正範囲及び逆投影位相幅(再構成に使用するビュー方向の幅)に基づき重み関数を作成し、この重み関数を用いて画像再構成を行うものである。体動補正範囲は、重み関数のスロープ部として保障される幅を表現する補正角度幅インデックスεとして設定される。逆投影位相幅(データ幅)は、データの冗長性やSN、画像に寄与する時間幅(時間分解能)を考慮して決められる。これら二つのパラメータに基き重みを決定することにより、断層像の再構成において、すべてのスキャン範囲の投影データの再構成に適用することができ、データの寄与率の低下を防止し、しかも体動アーチファクトを低減し高品質の画像を得ることができる。 (もっと読む)
奥行きマップの生成
画像(100)の各ピクセルについて観察者への距離を表す奥行き値を含む奥行きマップ(106)を生成する方法。該方法は:画像(100)を第一のセグメント(110)と第二のセグメント(108)にセグメント分割し;前記第一のセグメント(110)の第一の大きさに基づいて、前記第一のセグメント(110)のピクセルの第一のものに対応する奥行き値の第一のものを割り当て、前記第二のセグメント(108)の第二の大きさに基づいて、前記第二のセグメント(108)のピクセルの第二のものに対応する奥行き値の第二のものを割り当て、前記第一の大きさが前記第二の大きさよりも小さければ前記奥行き値の第一のものが前記奥行き値の第二のものよりも小さいようにする、ことを含む。 (もっと読む)
遮蔽された部分の表面を対称性の算出により見込み復元するための技術

【解決手段】所与の物体の遮蔽面の見込み3Dマップを計算するシステムに関する。このシステムは、物体の視認可能面の初期3Dマップを取得し、初期3Dマップから1以上の対称性を特定する。システムは、初期3Dマップの点を特定された対称性にしたがって遮蔽空間に投影することにより、遮蔽面の見込み3Dマップを計算する。このシステムは初期3Dマップを取得するための画像装置を含む。現実の遮蔽面は隠されているが故に完全にはわからない。しかし、計算された3Dマップは実際の遮蔽空間に多くの点で近似する。なぜなら、ほとんどの物体は1以上の対称性をもっており、計算された3Dマップは物体の初期3Dマップにおいて特定されたそのような対称性に基づくからである。 (もっと読む)
動きボケ低減のための帯域通過フィルタを用いた動き補償逆フィルタリング
本発明は、ホールド型ディスプレイ(101)に示されるビデオ信号の画像の動きボケを低減する方法、計算機プログラム、計算機プログラム製品及び装置を提供することであり、これらは、前記ビデオ信号の前記画像の動く成分の動きベクトルを推定するステップ(1102)と、前記ビデオ信号を空間周波数領域に対して帯域通過フィルタ処理を行うステップ(110,1101)であって、前記帯域通過フィルタ処理を行うステップが、少なくとも一部前記推定された動きベクトルに依存し、前記帯域通過フィルタ処理ステップの通過帯域が、前記推定された動きベクトルの長さが増加するに連れて高空間周波数から中間空間周波数に順応的に移動する帯域通過フィルタ処理ステップ(110,1101)と、前記ホールド型ディスプレイに関する入力ビデオ信号を生成するために、前記ビデオ信号及び前記帯域通過フィルタ処理されたビデオ信号を組み合わせるステップ(1104)と、を含む。 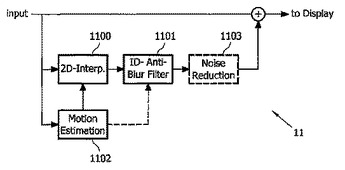 (もっと読む)
(もっと読む)
冠状血管可視化のためのレンダリング
器官レンダリングのためのシステム(100)及び相応の方法(200)が提供され、システム(100)はプロセッサ(102)を含み、器官を示す器官スキャンデータを受信するためにプロセッサと通信するイメージングアダプタ(130)を含み、器官の外側表面をセグメント化するためにプロセッサと通信するセグメンテーションユニット(170)を含み、複数の光線の各々においてセグメント化された外側表面に対して実質的に垂直な最大値投影(MIP)を提供し、さらにセグメント化された外側表面へ個別MIPによって器官の中心から複数の光線の各々をキャストすることによってレイコレクションを形成するためにプロセッサと通信するレイキャスティングユニット(180)を含み、さらに、方法(200)は器官の外側表面をセグメント化すること(216)を含み、複数の光線の各々においてセグメント化された外側表面に対して実質的に垂直な最大値投影(MIP)を提供すること(218)を含み、さらにセグメント化された外側表面へ個別MIPによって器官の中心から複数の光線の各々をキャストすることによってレイコレクションを形成すること(220)を含む。  (もっと読む)
(もっと読む)
3D自動測量装置
360度全周囲カメラで得られる動画映像を解析して、画像内の任意の対象物について高精度な三次元計測を行う。所望の計測点と座標が既知の基準点を含む動画像を撮影する周囲画像撮影部101と、撮影画像を記録する画像記録部102と、画像内の映像的な特徴点を抽出する特徴点抽出部103と、画像内の計測点を自動抽出する計測点特定部104と、画像内の基準点を自動抽出する基準点特定部105と、計測点,基準点,特徴点を各フレーム画像内で対
応付ける対応点追跡部106と、対応付けられた計測点,基準点,特徴点の三次元相対座標を演算するベクトル演算部107と、上記演算を繰り返して三次元相対座標を統計処理する誤差最小化処理部108と、基準点の既知座標により三次元相対座標を絶対座標系に変換する絶対座標取得部109と、最終座標を記録する計測データ記録部110と、記録された計測データを表示する表示部111とを備える。
(もっと読む)
ヒト中枢神経系への損傷を測定するためのコンピュータシミュレーションモデル
コンピュータ化されたモデルが、ヒト脊髄をシミュレーションし、将来の損傷の確率または過去に起こった特定の損傷が起きる見込みについての推測を引き出すことを可能にする。脊髄は、多数の有限要素から形成される複数の2次元グラフによってモデル化される。2次元グラフは、患者の様々な脊椎レベルで、測定された脊髄の位置に対応する位置に積み重ねられる。積み重ねられたグラフは、他の患者から取得した同様のデータと比較することのできる3次元モデルを生成する。モデルは脊髄の全部または一部に加えられる応力のシミュレーションを含むことができ、それによって摂動された3次元モデルが生成され、それを既知の損傷を有する患者から取得した同様のデータと再度比較することができる。したがって、本発明を使用して、特に車両またはスポーツ事故の結果として起こる脊髄損傷の主張を検証することができる。 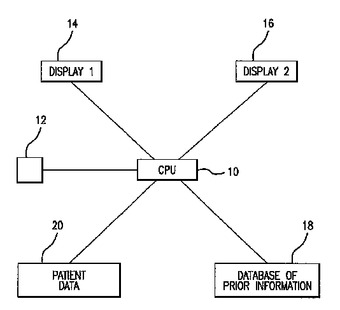 (もっと読む)
(もっと読む)
インバンド動き補償時間フィルタリングを利用したビデオノイズ除去アルゴリズム
ウェーブレット変換器(12)が、ビデオシーケンスの各フレームを2次元バンドに空間的に変換し、該2次元バンドが次いで時間方向に分解され空間−時間サブバンドを形成する、ビデオ信号をノイズ除去する方法。空間的な変換は、シフト不変の動き基準フレームを生成するため、低バンドシフト法の適用を含んでも良い。前記2次元バンドの分解は、各2次元バンドについて1つの、動き補償時間フィルタ(16)の利用を含んでも良い。付加的なノイズは次いで、例えば軟閾値法、硬閾値法及びウェーブレットウィナーフィルタのようなウェーブレットノイズ除去手法を利用して、各空間−時間サブバンドから除去される。  (もっと読む)
(もっと読む)
映像に基づいたフォトリアリスティックな3次元の顔モデリング方法及び装置
【課題】 映像に基づいたフォトリアリスティックな3次元の顔モデリング方法及び装置を提供する。
【解決手段】 描写された多角形のメッシュモデルによって表現される3次元のフォトリアリスティックな顔モデル生成方法において、入力映像の正面及び側面の顔映像内の顔特徴を検出する段階と、特定顔の3次元形状を決定するために、検出された顔特徴を利用して初期モデルを変形させて3次元の顔モデルを生成する段階と、入力映像からフォトリアリスティックなテクスチャを生成する段階と、前記テクスチャを前記3次元モデル上にマッピングする段階と、を含むことを特徴とする3次元の顔モデリング方法。これにより、デジタルカメラのように相対的に高価ではない装置を利用してデータを獲得し、可能な限り自動化を具現して、完全でない入力データから望ましく実際の人間らしい顔のモデ
リング方法を提供する。
(もっと読む)
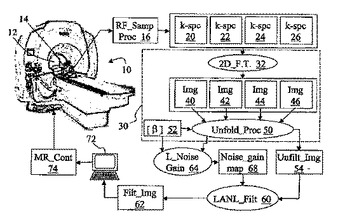
局所適応的な非線形ノイズ削減
撮像スキャナ(10)が撮像データを取得する。再構成プロセッサ(30)が撮像データを再構成してフィルタ処理前再構成画像にする。局所的ノイズマップ作成プロセッサ(64、120、136、140、142、152)が前記フィルタ処理前再構成画像における空間的変動のあるノイズ特性を表すノイズマップ(68、68′、68″)を生成する。局所適応的な非線形ノイズフィルタ(60)がノイズマップ(68、68′、68″)に従って前記フィルタ処理前再構成画像の異なる領域を異なる仕方でフィルタ処理してフィルタ処理済み再構成画像を生成する。
 (もっと読む)
(もっと読む)
医用画像診断支援装置及びプログラム
本発明の医用画像診断支援装置は、医用画像装置によって得られた被検者の医用画像から臓器部位を設定する臓器部位設定手段と、この臓器部位設定手段によって設定された臓器部位の変形度を算出する変形度算出手段と、前記臓器部位の変形度の指標を基準値として記憶する基準値記憶手段と、この基準値記憶手段によって記憶された基準値と前記変形度算出手段によって算出された変形度とを比較し、その比較結果からの前記臓器部位の病変の存在を判別する病変判別手段と、この病変判別手段によって判別された前記臓器部位の病変の存在を検者の視覚、聴覚の少なくとも一つの感覚に通知する通知手段とを備える。 これにより、臓器部位が疾患により変形した箇所だけを選択的に診断し、その診断部位の形状変化を画像表示などの検者の視覚や音声などの検者の聴覚で通知できるようになるから、診断の効率を向上できる。 (もっと読む)
CTにおける金属アーチファクトの訂正
アーチファクト訂正する画像復元装置は、取得した投影データ(60)を訂正されていない復元画像(74)に復元する復元プロセッサ(70)を含む。分類プロセッサは、この訂正されていない復元画像(74)を少なくとも高密度、中間密度、低密度のピクセルクラスに分類する。ピクセル置換プロセッサ(88)は、合成画像(90)を生成するために、高密度及び低密度のクラスからなる訂正されていない復元画像(74)のピクセルを低密度のピクセルのクラスのピクセル値と置き換える。前投影プロセッサ(94)は、合成投影データ(96)を生成するために、合成された画像を前投影する。投影置換プロセッサ(100、110)は、訂正された投影データを生成するために、高密度クラスのピクセルに寄与している取得した投影データ(60)を対応する合成投影データ(96)と置き換える。復元プロセッサ(70)は、この訂正された投影データ(112)を訂正された復元画像(120)に復元する。 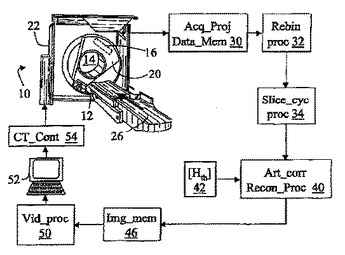 (もっと読む)
(もっと読む)
フラワーデザイン方法
【課題】インターネットに接続されたパソコン上で、生花の通信制作配達販売とフラワーデザイン教室を運営する目的で、ディスプレイ画面上で、自由にかつ簡単に、誰にでも、スピーディーに、フラワーデザインを可能とする。
【解決手段】視点を固定した状態で、各切花を、茎の根元の断面中心点を支点にして動かして、当該切花のあらゆる態様を撮影しておき、フラワーデザインに際して、切花の中心点を支点にして任意に動かした位置での画像を、切花の左右への回転の角度、前方傾斜の角度、茎軸回転の角度および草丈の長さを指定することで、当該切花の画像をパソコンのディスプレイ画面上に表示する手法を採ることによって、各切花のあらゆる態様を呼び出して表現でき、その結果、自由自在に無限に近いフラワーデザインが可能とする。
(もっと読む)
画像歪み補正装置及び方法
【課題】 複雑な処理を必要とせず簡便かつ安価に精度良く光学系に起因する画像の歪みを補正できる画像歪み補正装置及び方法を提供する。
【解決手段】 カメラ10によって撮影したディジタル画像データを取り込んでメモリ11に記憶する。光学的画像中心算出部12により光学的画像中心を算出し、画素傾き算出部13により画像のシェーディングから画素毎の局所的な輝度の傾き量を算出して、画素距離算出部14により画素毎の傾き量に基づいて画像が歪まない場合の画素各々の光学的画像中心からの距離を算出する。画像再構成部15により各画素の光学的画像中心からの距離を示す極座標をXY座標に変換し、この座標を基にメモリ11から読み出した画像データをXY平面上に再構成し、再構成された画像データについて画素補間部16により出力画面の座標位置に基づいて画素の補間を行って出力する。
(もっと読む)
実立体モデル作成装置、立体データ作成装置、疑似立体データ作成装置並びにその方法
【課題】 レーザ光を対象物上にスキャンして三次元形状データを得るには、そのスキャンにかなりの時間がかかりその間対象物が静止している必要があり、人物などの三次元形状データを得るのは、難しいという問題があった。
【解決手段】 データ入力部10において、カメラを用い対象物の複数の画像を得る。この画像に基づいて、モデリング部12において、色彩データを含む三次元形状データを得る。この三次元形状データに基づいて成形部14において実立体モデルを成形する。これは切削や成形型による成形によって行われる。そして、色づけ部16により、色彩データに基づいて、実立体モデルに対し色づけが行われる。
(もっと読む)
961 - 978 / 978
[ Back to top ]