
Fターム[5B057DC05]の内容
Fターム[5B057DC05]の下位に属するFターム
重心 (501)
始点、終点、屈曲点、分岐点 (396)
Fターム[5B057DC05]に分類される特許
1,301 - 1,320 / 1,510
車載画像処理装置、および画像処理方法

【課題】 画像内における消失線位置を算出すること。
【解決手段】 制御装置103は、カメラ101によって撮像された各フレームの画像から抽出した縦方向のエッジと横方向のエッジの交差する点をエッジ交点として抽出する。そして、複数のエッジ交点の中から、フレーム間での画像上におけるエッジ交点同士の位置関係が変化しないエッジ交点の組を観測点群として特定し、特定した観測点群の画像上での動きを観測して自車両のピッチングを検出する。画像内に存在する物体の高さの異なる任意の2点を特徴点として抽出し、各特徴点からピッチングの影響を排除した後に、2つの特徴点間の長さ、およびピッチングの影響を排除した後の各特徴点のそれぞれの画像上での速度の比に基づいて、画像内における消失線の位置を算出する。
(もっと読む)
画像処理装置、画像処理方法、および画像処理用プログラム

【課題】撮像する画像内に含まれるさまざまな情報を多面的に処理し得る画像処理装置、画像処理方法、および画像処理用プログラムを提供する。
【解決手段】撮像した画像から画像処理を行う対象物を検知した場合、撮像位置から検知した対象物までの距離を算出し、対象物を含む複数の画像のうち、少なくとも二つの異なる時刻に撮像された画像に含まれる対象物までの距離を用いて所定時間経過後の対象物の自車両に対する相対位置を予測し、この予測結果に基づいて画像処理を行う処理領域を設定し、この設定した処理領域に対して所定の画像処理を行う。
(もっと読む)
画像処理装置、画像処理方法、および画像処理用プログラム
【課題】撮像する画像内に含まれるさまざまな情報を多面的かつ効率的に処理し得る画像処理装置、画像処理方法、および画像処理用プログラムを提供する。
【解決手段】移動体に搭載され、所定の視野を撮像して画像を生成する撮像手段と、前記移動体の移動状況を検知する移動状況検知手段と、前記移動状況検知手段で検知した前記移動体の移動状況に応じて、前記視野全域を和集合とする複数の閉領域を前記画像に対して設定する閉領域設定手段と、前記閉領域設定手段で設定した閉領域ごとに所定の画像処理を行う画像処理手段と、を備える。
(もっと読む)
画像処理装置および方法並びにプログラム
【課題】 画像を自然に仕上げつつ、人物の顔等の画像中の構造物を特定できないようにする。
【解決手段】 パラメータ取得部32が、顔検出部31によって検出された画像P0中の顔部分P0fを、複数の人物の顔部分が表された複数のサンプル画像に基づいてAAMの手法によって生成された数学モデルMに適応させることによって、顔部分P0fにおける個人の特徴を表す重みづけパラメータC0を取得する。再構成部33が重みづけパラメータC0の値を小さくするよう変更し、変更したパラメータC1に基づいて、顔部分P0fを再構成する。
(もっと読む)
画像処理方法、画像処理装置
【課題】 現実空間を撮像するカメラの位置姿勢を測定するための指標を、画像中から簡便に識別する為の技術を提供すること。
【解決手段】 指標が配された現実空間の画像から検出した指標の候補領域の明度、及び面積を求め(S420)、求めた明度、面積に基づいて、候補領域が指標に対応する領域であるかを識別する(S440)。
(もっと読む)
画像処理装置、画像処理方法、および画像処理用プログラム
【課題】撮像する画像に含まれる情報を多面的かつ効率的に処理し得る画像処理装置、画像処理方法、および画像処理用プログラムを提供する。
【解決手段】移動体に搭載され、所定の視野を撮像して画像を生成する撮像手段と、前記撮像手段の撮像位置から前記画像を構成する各構成点までの距離を算出する距離算出手段と、前記画像に対して処理対象となる処理領域を設定する処理領域設定手段と、前記処理領域設定手段で設定した処理領域に対し、前記撮像位置からの距離帯域に応じた画像処理を行う画像処理手段と、を備える。
(もっと読む)
被検対象物の材料界面を決定するための方法及び装置
本発明は、被検対象物(1)の材料界面を決定するための方法及び装置に関し、透過放射線を用いて、画像データの画像値を取得することによって被検対象物(1)の三次元画像データを生成するか、或いは取得して置いた画像データの画像値によって被検対象物(1)の三次元画像データを取得し、被検対象物(1)に対して相対的に、画像データを評価するための評価線(17)を決定し、評価線(17)の方向における画像値の第1の部分導関数の絶対値が材料界面の位置に極大値を有するように、この評価線に沿って存在する画像値を評価することによって、被検対象物(1)の材料界面の位置を決定するものである。 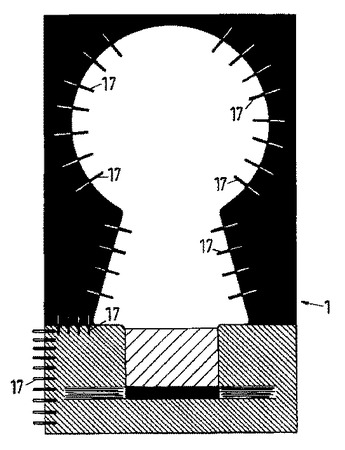 (もっと読む)
(もっと読む)
画像歪曲防止装置及びその方法
【課題】画像歪曲防止装置及び方法を提供する。
【解決手段】画像に関する情報を有する画像信号にセンシング信号(IN1)を挿入し、センシング信号(IN1)が挿入された画像信号をスキャニング信号(IN1)として出力する信号挿入部(230)と、スキャニング信号(IN1)に応答して光を生成し、前記光が走査される方向を決定する駆動信号によって前記光を走査するスキャニング部(240)と、前記走査された光を検出してセンシング信号(IN1)を感知する感知部(260)と、センシング信号(IN1)が所定のセンシング条件に適して感知されるか否かを検査し、前記検査された結果に応じて、前記画像信号及び前記駆動信号のうち少なくともいずれか一つを再設定するセンシング条件反映部(270)と、を備える。
(もっと読む)
車両及びレーンマーク認識装置
【課題】鋲型のレーンマークの検出が不能となることを抑制した車両及びレーンマーク認識装置を備えた車両を提供する。
【解決手段】Botts Dotsの設置間隔Lを認識する設置間隔認識手段21と、車両の移動速度vを認識する車速認識手段22と、画像入力回路10により画像メモリ11に記憶された画像データM1と画像メモリ12に記憶された画像データM2とを合成して、合成画像データM3を生成する画像合成手段13と、画像データM1,M2を取得するときに、カメラ2よる画像の撮像タイミングを、設置間隔Lと移動速度vとに基づいて、画像データM1,M2におけるBotts Dotsの位置が異なるように決定する撮像タイミング決定手段20と、合成画像データM3からBotts Dotsを検出するBotts Dots検出手段14とを備える。
(もっと読む)
顔判別方法および装置並びにプログラム
【課題】画像のコントラストを正規化した後、画像上の輝度分布に係る特徴量に基づいて当該画像が顔画像であるか否かを判別する処理において、画像上の顔への重畳物、斜光、顔以外の背景による濃淡のばらつき等の影響による判別精度の低下を抑制する。
【解決手段】正規化処理を、当該判別対象画像における各局所領域について画素値の分散の程度が所定レベルに近づくように画素値の階調変換を行う処理とし、その局所領域を、判別すべき顔の目が1つのみ含まれる大きさの領域とする。顔であることを特徴付ける目や鼻等の顔の構成部品内でのコントラストの変化を抑えつつ、顔以外のものによる濃淡変化の影響を受け難い安定した正規化が可能となる。
(もっと読む)
画像処理装置およびそれを用いた内視鏡
【課題】複数の2次元画像から、鮮明な3次元画像を生成する。
【解決手段】本発明の画像処理装置10は、2次元の画像を撮影する撮像手段11と、複数の2次元画像15から3次元画像16を生成する画像生成手段12を具備している。画像生成手段12は、マトリックス状に配置された複数のレンズ等から成るユニットUを具備しているので、このユニットUの数に対応した2次元画像を取得することができる。また、各ユニットU同士の相対的な位置は極めて正確に事前に把握することができるので、3次元位置を算出するための計算を正確に且つ容易に行うことができる。
(もっと読む)
画像処理装置
【課題】 白線検出結果の信頼度合いを正確に把握すること。
【解決手段】 エッジ強度の距離分布における最大のエッジ強度(MAX)を基準としてエッジ強度の閾値を設定し、エッジ強度の距離分布において、エッジ強度が閾値以下となる自車からの距離をエッジ検出距離として算出し、このエッジ検出距離の長さに応じて白線検出結果の信頼度合いを算出する。
(もっと読む)
画像処理方法及び画像処理装置
【課題】 画像中の物体を高精度に分離することができる画像処理方法及び画像処理装置を提供することを課題とする。
【解決手段】 撮像画像中の物体を分離する画像処理方法であって、視点の異なる複数の撮像画像を取得する撮像ステップと、複数の撮像画像に基づいて撮像対象の三次元形状(三次元点群)を求める三次元点処理ステップと、三次元点群をグループ化するグループ化ステップと、グループ化した三次元点群を撮像画像の基準画像上に投影する投影ステップと、基準画像を領域に過分割する過分割ステップと、隣接する各過分割領域におけるグループ毎の三次元点の数をそれぞれ求め、当該各グループの三次元点の数により隣接する過分割領域間の結合度を求める結合度処理ステップと、結合度に基づいて隣接する過分割領域間を結合又は分離することによって物体を分離する分離ステップとを含むことを特徴とする。
(もっと読む)
座標変換関数の補正方法
【課題】測定対象物の正確な3次元形状測定を行うために、精度のよい座標変換関数を計算することが可能な座標変換関数の補正方法を提供する。
【解決手段】カメラ座標系の各座標軸の向きと基準座標系の各座標軸の向きとを一致させた状態で、両座標系の2つの座標軸に対してそれぞれ平行に3次元形状測定装置30を移動させ、各移動方向においてそれぞれ少なくとも2つの位置で基準球60の3次元形状を測定する。そして、各移動方向ごとに座標変換関数によって座標変換された基準球60の中心座標を定点として計算し、各移動方向ごとの各定点によって基準座標系に定義される直線の傾きを計算する。この各移動方向ごとに直線の傾きに応じて第1座標変換関数を座標回転関数M’を用いて補正した後、この補正された第1座標変換関数によって座標変換された定点を用いて第1座標変換関数の座標移動関数を補正する。
(もっと読む)
画像に含まれる人物を認識する際の時刻の利用
長期間にわたって取得したディジタル画像コレクションの中から興味の対象となる特定の少なくとも一人の人物を同定する方法は、それぞれのディジタル画像に一人以上の人物が含まれているディジタル画像コレクションを用意するステップと;付随するある時刻における興味の対象である特定の人物の顔の特徴に関する距離測定値である1セットの特徴を持つ外見モデルをディジタル・データベースに記憶させるステップと;個人認識分類装置を設け、その個人認識分類装置において、外見モデルと付随する時刻とを利用して、ディジタル画像コレクションの画像の中で興味の対象である特定の人物を同定するステップを含んでいる。  (もっと読む)
(もっと読む)
画像計測方法、装置、プログラム及び記録媒体
【課題】ステレオ視を用い、1枚の画像上で測定範囲を設定するだけで画像内オブジェクトの実寸を算出する。
【解決手段】画像計測装置は、測定対象及び参照物体が同時に撮影された2枚の画像の撮影時のアフィン射影行列及び透視射影行列と、両画像間の拘束関係を与える行列とを算出する撮影情報算出部200と、一方の画像において対象領域を囲んで指定された矩形の辺を、参照物体の像の3つの辺の像の線形結合で表した際の結合係数を算出し、矩形の形状を修正する対象領域決定部300と、他方の画像において、矩形に対応する領域を対応対象領域として算出する対応対象領域決定部400と、透視射影行列と、対象領域での矩形の頂点位置と、対応対象領域での矩形の頂点位置を用いて、対象領域へのカメラ中心からの奥行と参照物体へのカメラ中心からの奥行を比較し、対象領域の頂点の3次元座標を算出する対象領域実寸算出部500と、を有する。
(もっと読む)
運動中のオブジェクトの大域的な形状を追跡するシステムおよび方法
ここに記載されているのは、運動中のオブジェクトの大域的な形状を追跡するシステムおよび方法である。ここではこの大域的な形状の初期輪郭に沿って1つ以上の制御点が定められる。運動中の1つ以上の制御点の各々は、オブジェクトの運動に伴って追跡される。運動中の制御点の位置の不確かさは、多数の手法を使用して表される。大域的な形状を制約するための不確かさは、予備の形状モデルを使用して利用される。択一的な1実施形態では、制御点毎に複数の外観モデルが形成され、各モデルによって形成される動きベクトルが組み合わされてオブジェクトの形状が追跡される。オブジェクトの形状の運動は、ディスプレイおよびカラーベクトルを使用して視覚的に追跡することができる。  (もっと読む)
(もっと読む)
画像処理方法及び画像処理装置
【課題】 画像中の物体を高精度に分離することができる画像処理方法及び画像処理装置を提供することを課題とする。
【解決手段】 撮像画像中の物体を分離する画像処理方法であって、基準の視点での撮像画像を取得する撮像ステップと、基準の視点での撮像画像を領域に過分割する過分割ステップと、隣接する過分割領域間の境界をまたぐように複数の参照点を設定する参照点設定ステップと、複数の参照点の三次元位置を求める三次元復元ステップと、視点の異なる複数の視点変化画像を取得する視点変化撮像ステップと、三次元位置の複数の参照点を各視点変化画像に投影する投影ステップと、複数の視点変化画像間での隣接する過分割領域における投影点の相対変位に基づいて隣接する過分割領域間の結合度を求める結合度処理ステップと、結合度に基づいて隣接する過分割領域間を結合又は分離することによって物体を分離する分離ステップとを含むことを特徴とする。
(もっと読む)
画像認識方法
【課題】被測定体の寸法測定の際、問題となる画像歪みを補正する画像認識方法を提供することを目的とする。
【解決手段】正確に実測した格子状の治具4を認識することで画像上に基準ポイントを与え、このポイントにより、格子毎に分解能を設定し、更に実測ポイントからの測定とすることで認識画像の歪みを補正して画像認識を行うことにより、比較的容易、かつ安価で小さなレンズにて、広視野、高精度に寸法測定を行うことが出来るものである。
(もっと読む)
画像処理方法およびその方法を用いた3次元計測方法ならびに画像処理装置
【課題】対象物の位置をサブピクセル単位で抽出できるようにする。
【解決手段】対象物の良品モデルを撮像して得たモデル画像から、その画像上のエッジ画素、その濃度勾配方向、およびサブピクセル単位のエッジ位置が抽出されて、ハードディスク14に登録される。処理対象画像が入力されると、CPU11は、モデル画像に対応する画像領域の位置をピクセル単位で求めた後、その画像領域において、モデル画像側の対応画素にサブピクセル単位のエッジ位置が対応づけられているエッジ画素を抽出する。そして、これらのエッジ画素につき、サブピクセル単位のエッジ位置を抽出し、その抽出位置とモデル画像側のエッジ位置とのずれ量を算出する。さらに各エッジ画素毎に求めたずれ量の平均値により前記ピクセル単位の位置を修正し、対象物の真の位置とする。
(もっと読む)
1,301 - 1,320 / 1,510
[ Back to top ]