
Fターム[5B057DC08]の内容
Fターム[5B057DC08]に分類される特許
2,421 - 2,433 / 2,433
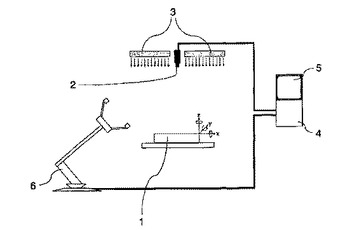
物体の3D位置の非接触式光学的測定方法及び測定装置
この発明は物体の3D位置、すなわち、ある幾何学的特性が公知の物体の3D位置及び3D配向の非接触式光学的決定のための方法及び装置に関する。前記発明の目的は単純な手段で、高測定速度、精度で、調査物体に関する完全な3D情報を調査することである。この目的のため、物体画像がカメラによって生成され、その生成画像に基づく物体の3D位置が、検出幾何学的特性に関する画像情報によって計算される。
 (もっと読む)
(もっと読む)
映像に基づいたフォトリアリスティックな3次元の顔モデリング方法及び装置
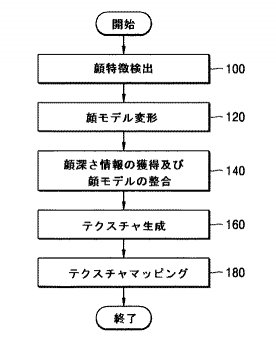
【課題】 映像に基づいたフォトリアリスティックな3次元の顔モデリング方法及び装置を提供する。
【解決手段】 描写された多角形のメッシュモデルによって表現される3次元のフォトリアリスティックな顔モデル生成方法において、入力映像の正面及び側面の顔映像内の顔特徴を検出する段階と、特定顔の3次元形状を決定するために、検出された顔特徴を利用して初期モデルを変形させて3次元の顔モデルを生成する段階と、入力映像からフォトリアリスティックなテクスチャを生成する段階と、前記テクスチャを前記3次元モデル上にマッピングする段階と、を含むことを特徴とする3次元の顔モデリング方法。これにより、デジタルカメラのように相対的に高価ではない装置を利用してデータを獲得し、可能な限り自動化を具現して、完全でない入力データから望ましく実際の人間らしい顔のモデ
リング方法を提供する。
(もっと読む)
ラスタ画像データセットの品質管理
ラスタ画像データの、出力ごとの関連品質パラメータを正確かつ客観的に評価・制御し、また、ラスタ画像データの状態に基づく品質欠陥を、出力前に高い信頼性で認識する方法を提供するために、ラスタ画像データセットの品質管理を行うこの方法において、評価装置により、ラスタ画像データセット内において、出力のための技術的適性より高度な、出力ごとの品質パラメータも測定され、少なくとも一つの選択された出力方法のための少なくとも一つの参照パラメータと比較することによりこれが評価される。  (もっと読む)
(もっと読む)
心臓関連の取得のための自動的な最適面の決定
心臓イメージを取得するために最適な観察面を決定する方法(1100)、システム(1200)および装置(101)。該方法(1100)には、心臓の矢状面イメージと軸面イメージと冠状面イメージとのセットを取得する手法が含まれ、軸面イメージおよび冠状面イメージは矢状面イメージと直交し、心臓は固有軸と、血液プール、血液プール境界および心尖(1110)を有する左心室(「LV」)とを含む。本方法には血液プール境界(1140)のマップを形成するステップと、該マップを使用して、固有軸(1160)に沿って方向決定された完全な座標フレームを作成するステップとが含まれる。 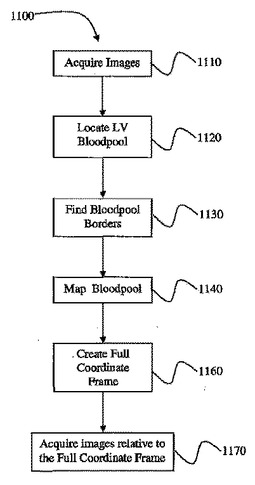 (もっと読む)
(もっと読む)
深度データを用いたビジュアルトラッキング

【課題】深度感知撮像技術を用いたリアルタイムビジュアル画像トラッキングにより、照度不変のトラッキング性能が得られる。深度感知(タイムオブフライト)カメラによって、同じ場面がリアルタイムで深度と色を持つ画像として提供される。深度ウィンドウはシャッター速度を制御してトラッキングする領域を調整する。深度画像データからポテンシャル領域が導き出され、トラッキングする目標物体の周縁部の情報が得られる。数学的に表される輪郭はトラッキングする目的物体をモデリングすることができる。この輪郭とトラッキングする目的物体の周縁部との間の適合度を決定し、深度データに基づいて、トラッキングのための位置情報が得られる。画像トラッキングに基づいて深度センサを用いる用途としては、頭部トラッキング、手のトラッキング、姿勢推定、ロボットの命令画定および、その他の人間とコンピュータの相互関係システムが挙げられる。 (もっと読む)
舌映像からの関心領域の抽出方法及び舌映像を利用した健康モニタリング方法及び装置
【課題】 舌映像からの関心領域の抽出方法及び舌映像を利用した健康モニタリング方法及び装置を提供する。
【解決手段】 (a)各個人別に撮影された舌映像、テンプレート映像と少なくとも一つ以上の特徴要素に対する健康状態の判別結果を対応させたデータベースを構築する段階と、(b)個人の舌映像から分割された舌領域でテンプレート整合を利用して関心領域を抽出する段階と、(c)前記(b)段階で抽出された関心領域に対して少なくとも一つ以上の特徴要素を検出する段階と、(d)前記(c)段階で検出された特徴要素と前記データベースから検索される健康状態別の当該関心領域の特徴要素とから追跡される舌の状態変化から個人の健康状態を判別する段階と、よりなる。
(もっと読む)
車両制御装置、プログラム及び方法
【課題】運転者のブレーキタイミングの特性や車両を取り巻く状況に柔軟に対応することができる車両制御を提供する。
【解決手段】車両制御装置は、自車両の外部の画像を撮影する撮影手段と、他車両の接近を検出するためのテンプレートを記憶するテンプレート記憶手段を有する。テンプレートは、運転者のブレーキ操作に基づいて適宜更新される。車両制御装置は、撮影した画像とテンプレートとを比較して、前方を走行する車両が相当接近してきたために、自車両の減速や停止が必要であるか否かの判断を行う認識処理手段をさらに有している。認識処理手段によって減速や停止が必要と判断され、かつ、運転者によってアクセルペダルを戻したりブレーキペダルを踏むなどの衝突回避の操作が行われなかった場合は、動作指示手段によって自車両に衝突回避操作を実行させる。
(もっと読む)
立体計測装置
【課題】ワークの立体形状を正確に計測する。
【解決手段】立体計測システムは、ワーク1100を撮像するカメラ100と、ワーク1100を照明するストロボ200と、カメラ100の電子シャッターに同期してストロボ200を発光させてワーク1100を撮像するように制御する制御回路と、撮像された画像データを画像処理する画像処理コンピュータとを含む。画像処理コンピュータは、撮像された画像データに対して、明度の不均一を補正するシェーディング補正回路と、補正された画像データに対して、カメラ100からワーク1100までの距離に応じた明度の違いに基づいて、ワーク1100の特徴量を算出する算出回路と、算出された特徴量に基づいて、ワーク1100の位置情報を作成する作成回路とを含む。
(もっと読む)
画像処理装置および画像処理方法、並びにコンピュータ・プログラム
【課題】 複数視点位置からの画像データに基づいて高画質な三次元画像生成を可能とする装置および方法を提供する。
【解決手段】 パッチ面毎に、パッチ面と各視点間の距離データ、および各視点のパッチ面に対する方向データとを適用した画質評価値に基づいてテクスチャ画像の選択を実行し、パッチ境界部におけるテクスチャ画像間の画素値誤差データに基づいて、端点移動によるマッチング処理を実行し、隣接テクスチャ画像中、パッチ面に対して、正対した視点方向にあるテクスチャ画像の画素値に大きな重み付けを行ない、パッチ境界部における画素値を算出し、さらに、パッチ面内の画素値を、パッチ境界線からの距離に反比例した重み係数を適用して、パッチ境界線の画素値に基づいて算出する。
(もっと読む)
ビジュアルサーボによる位置姿勢制御方法
【課題】 ビジュアルサーボによる位置姿勢制御においてカメラの縦揺れ角および偏揺れ角(姿勢角)の検出精度向上を図る。
【解決手段】 ロボット本体11は、制御装置12により位置の移動と姿勢の駆動制御がなされる。CCDカメラ15は、ロボット本体11の上アーム20に固定され、ワークWを撮影する。あらかじめ参照画像として基準位置からワークWを撮影したデータを記憶させる。制御装置12は、カメラ15で撮影した画像と参照画像のデータとに基づいてビジュアルサーボにより位置姿勢の制御を行なう。収束した段階では、カメラ15を姿勢角を所定以上傾けて画像データを取得する。このとき各画像での姿勢角と参照画像のデータとの誤差値を演算し、誤差値が最も小さくなるときの姿勢角を推定し、補正量として求める。この補正量だけ位置姿勢を制御することで、精度の高い制御を行なうことができる。
(もっと読む)
画像印刷装置及び方法
【課題】 失敗画像をプリント前にユーザに通知する。
【解決手段】 メモリカード12を画像印刷装置10のカードインターフェース14に接続すると、処理/制御装置16は、メモリカード12に記憶される画像を順次、読取り、それらのサムネイル画像をモニタ画面上に一覧表示する。失敗画像検知装置18が、各画像が失敗か否かを判定し、検知結果表示装置20が、失敗画像に対してその旨を表示する。
(もっと読む)
超音波診断装置
【課題】 超音波診断装置において、複数のカラードプラMモード画像と複数の速度曲線の合成表示を行う。
【解決手段】 走査面17上において2つのMライン19,21が設定され、それらのライン上においてサンプル点P1,P2が指定される。それらのサンプル点を貫通してベクトルラインL1,L2が設定され、それらを利用してサンプル点P1,P2の速度情報に対する角度補正がなされる。画像表示に当たっては、2つのカラードプラMモード画像と2つの速度曲線の合成表示がなされる。
(もっと読む)
画像処理方法、画像処理装置及び記録媒体
【課題】 人物の顔の内部構造に基づき、人物の顔に相当する領域を簡易な処理で精度良く抽出する。
【解決手段】 処理対象の画像から人物の顔に相当すると推定される顔候補領域を抽出し、顔候補領域を所定数のブロックに分割し(分割パターンを(A) に破線で示す) 、画像の天地方向に沿ったエッジ強度の積算値を各ブロック毎に演算する。各ブロック毎に求めた特徴量を、実際に人物の顔に相当する顔領域を前記分割パターンに従って分割し各ブロック毎にエッジ強度積算値を演算して求めたマッチング用パターン((B)参照) と照合し、顔候補領域に対し人物の顔に相当する領域(顔領域)としての確度を評価する。
(もっと読む)
2,421 - 2,433 / 2,433
[ Back to top ]