
Fターム[5B080BA00]の内容
イメージ生成 (11,603) | 幾何学処理 (1,215)
Fターム[5B080BA00]の下位に属するFターム
Fターム[5B080BA00]に分類される特許
41 - 44 / 44
クリティカルポイント解析に基づくポーズ推定
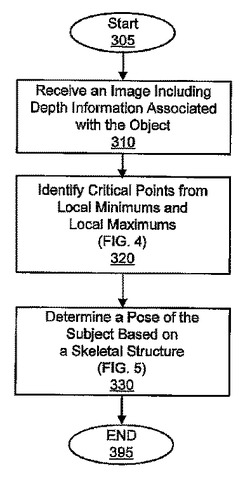
【課題】 対象物のポーズ推定の方法とシステムを提供する。
【解決手段】 対象物は人体、動物、ロボットでもよい。カメラ110で対象物310に関する奥行情報を受信し、ポーズ推定モジュール120で画像から対象物のポーズや行動を判定し、インタラクション・モジュール130で感知したポーズや行動に対する応答を出力する。ポーズ推定モジュール120により、対象物を含んだ画像を区分し、分類部分と未分類部分にする。区分化は k-means クラスタ法を用いてもよい。分類部分を、頭部や胴体部などの既知の対象として画像間で追跡してもよい。未分類部分をx軸とy軸に沿って走査を行い、極小値と極大値を特定する。極大値と極小値320からクリティカルポイントを導く。様々なクリティカルポイントを結んで潜在的な関節部を特定し、対象物の実対象に相当するのに十分な確率を有する関節部を選択し、判定済みの対象物のポーズに基づいて骨格構造を生成する。
(もっと読む)
多くのグラフの集合についてフォーカス及びコンテクストを表示するためのシステム、ツール及び方法

【課題】データ(例えば、線グラフ群として表示し得るデータ)のより大きな集合をコンパクトなグラフの形態で視覚化する。
【解決手段】コンテクスト及びフォーカスを提供するためにグラフの集合を視覚化するための方法で、少なくとも1つの圧縮されたグラフをズームして、圧縮されたグラフのスケールよりも第2の軸に沿ってより大きなスケールを有するその少なくとも1つのグラフを作成することができ、ズームされたグラフ(を圧縮されたグラフとともに表示することができる。この場合、そのズームされたグラフ(上記の1または複数)は圧縮されたグラフに対して同じ順序で、及び、ズームされる前の互いの順序と同じ順序で表示される。
(もっと読む)
トランケートされた投影と事前に取得した3次元CT画像を用いる円錐ビームCT装置
オブジェクトの領域の3次元画像を、X線装置で捕捉したトランケートされた円錐ビーム投影データと、オブジェクトのより大きな領域を表す事前CT画像とから計算する。トランケートされた投影データを外挿して検出器の外側の投影方向に関連する疑似投影データを求め、その疑似投影データで完成された、トランケートされた投影データに基づき中間CT画像を再構成する。次に、事前CT画像をその中間CT画像に登録する。検出器の外側の投影方向に関連する前方投影データをトランケートされた投影データと登録された事前CT画像から計算する。最後に、3次元画像を前方投影データで完成したトランケートされた投影データに基づき再構成する。 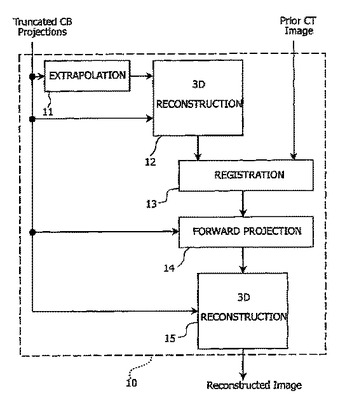 (もっと読む)
(もっと読む)
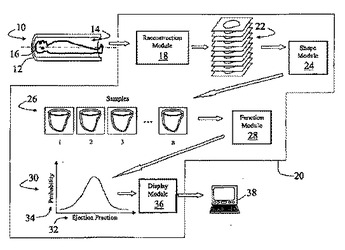
心臓機能の確率的解析
診断イメージング装置(10)は確率論的モデルに基づいて被検体の診断画像の区分化を行う。複数の断層画像の束(22)が、各々の束が遅れずに置換されるようにして生成される。断層画像の束から器官形状の複数解が複数の形状サンプル(26)の形態で計算される。画像を仮定した下での形状の条件付き分布を記述するベイズモデルに従ってサンプル群(24)が生成され、サンプル群の各々について、少なくとも1つの機能パラメータ(32)が導出される。各パラメータについて確率値(30)が導出され、表示(36、38)される。
 (もっと読む)
(もっと読む)
41 - 44 / 44
[ Back to top ]