
Fターム[5C034AB05]の内容
Fターム[5C034AB05]に分類される特許
1 - 7 / 7
滞留時間制御による局所加工方法
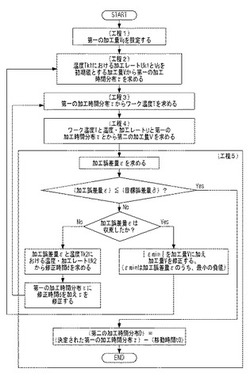
【課題】 従来の滞留時間制御による局所加工方法では、加工に伴うワークの温度変化による加工レートの変動を考慮していなかったため、加工精度が悪かった。
【解決手段】 本発明は、局所加工ツールによる第一の加工量を設定する工程(工程1)と、
第一の加工量と前記ワークの温度・加工レートから前記ワークの第一の加工時間分布を求める工程(工程2)と、第一の加工時間分布に従い加工した際のワーク温度を求める工程(工程3)と、求められた前記ワーク温度と、前記温度・加工レートと、前記第一の加工時間分布から、第二の加工量を求める工程(工程4)と、第一の加工量と前記第二の加工量との差である、加工誤差量に応じて、第二の加工時間分布を設定する工程(工程5)と、
第二の加工時間分布に基づき、前記局所加工ツールが前記ワークを加工する工程と、を有することを特徴とする局所加工方法である。
(もっと読む)
電子ビーム装置

【課題】 オペレータによる目視に基づく操作を行うことなく、自動的に、初期設定した大きさの断面の電子ビームを蒸発材料表面上に照射することが出来るようにする。
【解決手段】 蒸発材料3を収容した坩堝4と基板6が設けられたチャンバー1、及び、電子銃7、集束レンズ8、9、走査コイル11が設けられた鏡筒2を備えており、温度検出器18が取り付けられたアパーチャ10を集束レンズ8による電子ビーム集束位置の近傍に配置し、温度検出器18からのアパーチャ温度信号値を基準値と比較し、その差分を制御装置13に送る演算回路19を設け、制御装置13からの指令により集束レンズ8の集束作用をコントロールする様に成している。
(もっと読む)
集束イオンビーム装置、それを用いた試料の加工方法、及び集束イオンビーム加工用コンピュータプログラム
【課題】ピクセルを複数含む加工領域画像を変形しても、もとの画像を再現した加工を行うことができる集束イオンビーム装置を提供する。
【解決手段】集束イオンビーム20Aを試料2に照射する集束イオンビーム照射機構20と、集束イオンビームを試料に照射して生じる二次荷電粒子を検出する検出器70と、検出器の検出データに基づき、試料の試料画像を生成する画像生成手段90と、試料画像上で、集束イオンビームの照射位置に対応したピクセルを複数含む加工領域画像を設定する加工領域設定手段90と、加工領域画像に含まれるピクセルの座標を、試料への照射位置として設定する照射位置設定手段90と、ピクセル毎に定められた輝度に応じて、集束イオンビーム照射機構から照射される集束イオンビームのドーズ量を設定するビーム設定手段90と、加工領域画像が変形された場合に、該加工領域画像を補間処理する補間手段90とを備えた集束イオンビーム装置100である。
(もっと読む)
ビーム照射装置
【課題】コストを上昇させることがなく,且つ高速の振動にも追従することが可能な制振機能に優れたビーム照射装置を提供すること。
【解決手段】加速器より射出されるイオンビーム若しくは電子ビームを,電界及び/若しくは磁界による質量分離装置及びビーム収束装置を備えたビームラインを経てチャンバ中の試料に入射するビーム照射装置に関する発明であり,前記ビームライン中を通過するビームの前記試料に対する振れを直接または間接的に検出し,検出されたビームの試料に対する振れに基づいて振れを消去するように質量分離装置及び/若しくはビーム収束装置を制御するビーム照射装置。
(もっと読む)
集束イオンビーム装置、集束イオンビーム装置を用いた試料加工方法及び試料加工プログラム
【課題】加工パターン検出用のマークの検出確率と加工位置の再現性を向上させ、加工パターンの自動加工を円滑化することができる集束イオンビーム装置、集束イオンビーム装置を用いた試料加工方法及び試料加工プログラムを提供する。
【解決手段】加工パターンの加工前にマーク登録時の視野倍率よりも低いマーク検出用の視野倍率でマークを検出し、登録したマークと検出されたマークの位置を比較して位置ずれ量を算出し、イオンビーム偏向領域をシフトさせてマーク登録時の視野倍率に戻してマークを再検出する。その後、マーク登録時の視野倍率で検出されたマークと登録時のマークの位置を比較してマーク登録時の視野倍率で再度位置ずれ量を算出し、そのずれ量分だけ加工パターンの登録位置から加工用のイオンビーム照射位置をシフトさせて加工パターンの加工を実行する。
(もっと読む)
試料作製・観察方法及び荷電粒子ビーム装置
【課題】FIB加工とSEM観察の繰返しによる加工断面の奥行き方向のSEM観察において、加工断面が奥行き方向に移動することに伴って発生するSEM観察の観察視野ずれと焦点ずれを補正する。
【解決手段】断面加工領域の表面の高さと傾き情報を加工に先立って算出し、これらの情報を利用して、加工時における加工断面の移動量に応じたSEM観察の観察視野ずれと焦点ずれを予測し、この予測値に従ってSEMを制御する。
(もっと読む)
荷電粒子線装置
【課題】荷電粒子線の光学系の光軸に垂直な平面内、もしくは少し傾斜した平面内における回転機構をもった装置の回転操作に伴って発生する観察・加工位置の移動の補正を簡便かつ高精度に実現すること。
【解決手段】荷電粒子線装置における試料ホルダー、絞り装置、バイプリズムなどの、当該回転機構の2次元位置検出器とコンピュータ制御による駆動機構を利用し、さらにコンピュータの演算能力を利用することによって該平面内の回転に伴う移動量を演算によって求め、これを相殺させる様に駆動、制御を行なう。また、ひとつの入力によって複数の回転機構を互いに関連をもって操作させる。
(もっと読む)
1 - 7 / 7
[ Back to top ]