
Fターム[5C054ED17]の内容
閉回路テレビジョンシステム (47,623) | 輝度信号処理 (408) | N値化処理 (50)
Fターム[5C054ED17]に分類される特許
1 - 20 / 50
偏光画像による車両位置検知方法及びシステム
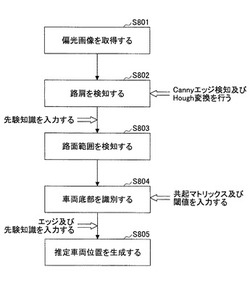
【課題】偏光画像による車両位置検知方法及びシステムを提供する。
【解決手段】かかる方法は、偏光カメラにより路面の偏光画像を取得する段階と、取得された前記偏光画像中の路面及び路肩の違いに基づいて、前記偏光画像中の路肩を算出し、算出された路肩間の部分を路面部分と決定する段階と、前記偏光画像における車両の車輪の画素値と実際の路面の画素値との顕著な差に基づいて、決定された前記路面部分における少なくとも一つ以上の推定車両底部を識別する段階と、識別された前記推定車両底部の各々に対し、前記偏光画像における車両の輪郭の画素値と背景の画素値との差に基づいて、対応する推定車両底部による推定車両位置を取得する段階を含む。
(もっと読む)
撮像装置

【課題】光学フィルタを通じて撮像した撮像画像に対して画像処理を行って互いに異なった光学成分を抽出して光学成分抽出画像を生成する場合に必要となる演算パラメータのデータ量を少なくすることを課題とする。
【解決手段】全単位画素(1pixel)に対応する演算パラメータのうち、全単位画素を3以上の単位処理領域に区分したときに互いに離間した2つの単位処理領域A,B,E,Fを構成する単位画素に対応した演算パラメータは予め記憶しておき、これらの単位処理領域の間に位置した特定単位処理領域α,β,γを構成する単位画素についての演算パラメータは、予め記憶せず、当該特定単位処理領域を挟み込む単位処理領域についての演算パラメータを用いた補間処理により生成する。
(もっと読む)
電子内視鏡用プロセッサ
【課題】患部の識別が容易となるように所定の領域のみに凹部強調の為等の所定の画像処理が行われた内視鏡画像を得ることが可能な電子内視鏡用プロセッサを提供する。
【解決手段】電子内視鏡用プロセッサは、内視鏡画像中の領域の指定を受け付ける入力手段と、内視鏡画像の少なくとも一部の領域に画像処理を行う画像処理手段とを有し、内視鏡画像の、前記入力手段を介して指定された領域内のみに、画像処理手段による所定の画像処理が行われることを特徴とする。
(もっと読む)
車載カメラ装置のキャリブレーション支援方法及びキャリブレーション支援装置、並びに車載カメラ装置
【課題】利用者が簡単に、所望の精度でもって、車載カメラのキャリブレーションを行えるようにする。
【解決手段】
車載カメラで撮影された、駐車枠やそれに類似の標識を含む路面の撮像画像データを取得し、該撮像画像データを俯瞰変換し、2値化して、2値化俯瞰画像データを生成し、該2値化俯瞰画像データを用いて、該車載カメラの設置誤差を評価する評価値を計算し、該評価値から車載カメラの設置誤差を判定し、該判定結果を基に、利用者にキャリブレーション操作を通知する。具体的には、2値化俯瞰画像データの2ラインの白画素に着目して評価値を計算し、車載カメラの横方向の位置ずれ、横方向の傾き、縦方向の傾きなどを判定する。利用者へのキャリブレーション操作の通知は表示装置や音声出力装置を用いて行うようにする。
(もっと読む)
車両の運転支援装置
【課題】撮像手段による撮像が不能となったときに、表示画像のフリーズにより運転者に違和感を与えることを緩和した車両の運転支援装置を提供する。
【解決手段】対象物画像抽出手段20により抽出された画像部分に対応する実空間上の対象物と、車両との相対速度を算出する相対速度算出手段24と、赤外線カメラ2R,2Lによる撮像が不能となったときに、画像メモリ28に保持された過去の画像のデータと、相対速度算出手段24により算出された相対速度とに基づいて、赤外線カメラ2R,2Lによる撮像が不能な期間における対象物の画像部分の変化を推定して表した擬似画像を生成し、該擬似画像を表示装置9に表示する擬似画像表示手段25とを備える。
(もっと読む)
画像配信方法、画像配信システム
【課題】画像データを使用する受信ノードを有するネットワークにおいて、受信ノードごとに必要とする解像度が異なるときに、ネットワーク帯域の使用量の抑制と、受信ノードのデータ処理負荷の軽減とを両立させた画像配信方法を提供する。
【解決手段】原画像を分割した画像領域に含まれる画素の画素データに基づく演算によって符号化データを導出し、当該符号化データの集合からなる複数の画像を作成し、当該複数の画像を配信する。配信を受けた受信ノードは、必要とする画像の解像度に応じて符号化データを組み合わせ、使用する画像を作成する。
(もっと読む)
移動物体検知判定方法
【課題】外乱が多発する監視画像による移動物体において、簡単かつ少ない計算量で移動体だけを確実に検出し、これを連続してカウントアップすることができる移動物体検知判定方法を提供する。
【解決手段】画像データを画像処理して移動物体を抽出した画像から動きを検知し、アラーム判定をする。前記移動物体を抽出した画像を時系列順に記憶部に取得し、画像処理して移動物体抽出画像とし、前記移動物体抽出画像を複数のブロックに分割処理し、前記複数のブロック毎に動き検知を認識し、前記移動物体抽出画像のブロック毎の動き検知の回数をアラームカウンタで計数するに際し、前画像における現検知ブロックに対応する周囲ブロックのカウント値の最大値を求め、カウント値の最大値をオフセット値として引き継いで前記アラームカウンタのカウント値を加算し、前記アラームカウンタのカウント値が所定のアラーム判定回数に達したか否かによりアラーム判定する。
(もっと読む)
映像処理装置
【課題】従来の方式では、入力画像をそのまま処理していたため、速度の運いCPUをを用いた場合等は、多くの侵入物が入ってきた場合や、侵入物が大きく撮像された場合に、処理速度が低下し、かつ検出性能が低下するという間題がある。
【解決手段】本方式では、撮像条件、物体検知範囲.検出する物体の大きさから、検出する物体の最小の幅、高さおよび、最大の幅、高さを算出する。算出した、最小の幅、高さ、最大の幅、高さから画像縮小係数を設定する。これにより、画像処理の検知精度を保ったままで検出ができ.かつ必要最低眼の処理適度で高速に侵入者検知を行うことができる。
(もっと読む)
遠赤外線撮像装置及び物理量検出方法並びに障害物推定装置及び方法
【課題】簡便かつ高精度に、障害物の輻射率、温度の少なくとも1つの物理量を検出する。
【解決手段】遠赤外線撮像装置は、障害物からの遠赤外線に応じた画像を生成する遠赤外線イメージセンサ20と、遠赤外線イメージセンサ20を時間的に異なる温度に制御する温度制御装置22と、温度制御装置22により異なる温度に制御された各々の状態で、遠赤外線イメージセンサ20により生成された画像の出力に基づいて前記障害物の輻射率、温度の少なくとも1つを検出する画像処理部30と、を備えている。
(もっと読む)
移動物体検知装置
【課題】監視領域内に形状の変化する物体の影が写っている場合でも、その物体の形状変化に伴う影の揺れによる誤検出を防止できる移動物体検知装置を提供する。
【解決手段】本発明に係る移動物体検知装置は、所定周期にて撮像した監視画像を順次画像処理して移動物体を検知する。係る移動物体検知装置は、移動物体が写っていない画像である背景画像と影の揺れが生じる可能性のある背景画像中の影境界領域を記憶する記憶部4と、監視画像と背景画像とを差分処理して差分領域を抽出する差分領域抽出手段20と、所定周期で撮影された複数の監視画像において輝度変動を繰り返し、且つ影境界領域に含まれる変動影画素を抽出する変動影画素抽出手段10と、変動影画素の全部または一部が差分領域に含まれていると当該差分領域が移動物体によるものである可能性が下がる判定値を用いて移動物体によるものか否かを判定する判定手段50とを有する。
(もっと読む)
画像処理システム
【課題】複数の画像送信手段1−1、1−2、1−3から送信される画像を処理する画像処理システムにおいて、各画像送信手段の送信レートを効果的に制御する。
【解決手段】画像受信手段3が複数の画像送信手段から伝送媒体2を介して送信された画像を受信し、送信レート制御手段(画像認識手段12、重要度判定手段13、送信レート決定手段14)が受信された各画像送信手段からの画像に基づいて各画像送信手段に割り当てる送信レートを決定し、送信レート指示手段14が決定された送信レートが各画像送信手段により使用されるように各画像送信手段に対して送信レートを指示する。
(もっと読む)
施設監視装置及び施設監視方法
【課題】照度計等の付属機器を設置することなく日照による画像への影響を排除できるようにし、これにより安価で高精度の監視を行えるようにする。
【解決手段】カメラ1により1時間おきに毎時0分になった時点で監視対象施設を撮像し、その監視画像データを撮像日時を表すタイムスタンプ情報を付加して記憶ユニット4に順次格納する。そして、最新の監視画像データが得られるごとに、当該最新の監視画像データと前日の同時刻における監視画像データを記憶ユニット4から読み出し、これらの監視画像データをその明るさの平均が任意の共通の値となるように画素ごとに明るさ(濃度)を補正する。次に、上記明るさが補正された後の監視画像データ間の差分を画素ごとに求めて絶対差分画像を生成し、この生成された絶対差分画像を画素ごとにしきい値と比較して、その結果をもとに上記監視画像データ間の変化の有無を判定する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】単眼カメラで撮影した画像から変化画素を含む矩形の領域を抽出する領域抽出処理機能を有する画像処理装置において、安定した精度の高い変化画素領域の抽出が可能な閾値の自動設定機能を実現する。
【解決手段】カメラで撮影した画像を順次入力し、入力した現在画像と過去画像から変化画素を含む領域を抽出する領域抽出処理手段を備えた画像処理装置において、前記領域抽出処理手段に、前記入力した一定期間内の複数の画像を対象に、画素あたりの輝度平均値と標準偏差を算出する算出手段と、前記算出手段が算出した画素毎の標準偏差を、前記変化画素を抽出するための対応する画素の閾値に設定する閾値設定手段と、を具備する。
(もっと読む)
表示装置
【課題】赤外線カメラおよび可視カメラの撮像により得られた各画像から適切な画像を生成する。
【解決手段】表示装置10を、可視画像を撮像する可視外界センサ11と、可視外界センサ11にて撮像する領域の少なくとも一部を含む領域の赤外画像を撮像する赤外外界センサ12と、消失点検知部21から出力される可視画像上の消失点、あるいは、道路領域抽出部22から出力される可視画像上の道路領域、あるいは、入力装置15を介して操作者から入力される入力指示に応じて、赤外画像に重畳させる可視画像中の重畳領域を設定する重畳領域設定部23と、可視画像上の重畳領域と、赤外画像とを重畳させる重畳画像生成部24とを備えて構成した。
(もっと読む)
車載用画像認識装置及び配光制御装置、並びに配光制御方法
【課題】
先行車や対向車の位置に応じて、より的確な配光パターンを実現する装置を提供する。
【解決手段】
車両の周囲を撮像するカメラからの撮像信号を入力する入力部901と、入力部901で入力した撮像信号から所定の連続した座標エリアを抽出する座標エリア抽出部902と、座標エリア抽出部902で抽出した座標エリアの特徴量を算出する特徴量算出部908と、座標エリア抽出部902で抽出された座標エリアのうち、特徴量算出部908で算出した同一または近似する特徴量を有する座標エリア同士をペアリングするペアリング部903と、ペアリング部903でペアリングした当該座標エリア同士の距離及び方向を示す信号を出力する出力部904と、を有する装置。
(もっと読む)
表示画像検査方法、表示画像検査システム及び表示画像検査プログラム
【課題】誰でも簡易に医用画像表示用モニタ特有の不良画像の確認、及びモニタ画像の検査を行うことのできる医用画像表示用モニタの表示画像検査方法、表示画像検査システム及び表示画像検査プログラムを提供する。
【解決手段】カラー画像として医用画像を表示する画像表示装置に複数の注目領域を有するテストパターンを表示して行う表示画像検査方法において、前記注目領域の画像と比較するための不良画像例の画像データを保持する画像保持部から、前記注目領域の画像と同時に表示する前記不良画像例の画像データを取得する表示画像取得工程と、前記表示画像取得工程により取得された前記不良画像例の画像データに基づく不良画像例と、前記注目領域の画像と、を前記画像表示装置に同時に表示させる画像表示工程と、を含む。
(もっと読む)
エリア警戒自動識別監視システム
【課題】監視対象物の識別精度を高くし、挙動が不審な監視対象物も検知する。
【解決手段】監視対象識別部22は、監視対象物パターンを登録し、撮影された映像からパターンマッチング技法を用いて監視対象物を識別処理する。ざわつき排除部21は、排除対象となる、ざわつきパターンを登録し、映像内のざわつきが、ざわつきパターンと一致すると、パターンマッチング技法を用いて排除処理する。挙動不審パターン登録部25は監視対象物の挙動不審パターンを登録処理し、挙動不審パターン識別部24は監視対象物の移動行動パターンが、登録処理された監視対象物の挙動不審パターンと一致するかオプティカルフローの画像処理技術を用いて識別処理する。
(もっと読む)
捕虫シートの検査装置及び捕虫シートにおける捕虫の画像計数方法
【課題】高いモニタリングの精度を維持しつつ、複数の捕虫シートを大量に処理することができる捕虫シートの検査装置を提供する。また、精度の高い画像計数を実現する捕虫シートにおける捕虫の画像計数方法を提供する。
【解決手段】本発明に係る捕虫シートの検査装置は、片面又は両面に粘着層を備える長尺な捕虫シートAであって、長手方向に一定間隔で仕切られて複数の区画を有する捕虫シートAを複数並列してセットするためのステージ2と、該ステージ2上にセットされた複数の捕虫シートA,…を同時期的に撮像可能な撮像手段4aと、該撮像手段4aにより取得された全体画像Xから、選択的に何れかの区画を切り出し、それを一つの画像データとして区画画像Yを生成する画像処理手段10aと、該画像処理手段10aにより生成された区画画像を表示する表示手段15とを備える。
(もっと読む)
車両周辺監視装置
【課題】画像から抽出された対象物が人工構造物であるか否かを、効率的かつ精度良く判定することができる車両周辺監視装置を提供する。
【解決手段】車両10に搭載された撮像手段2R,2L,2´によって得られる画像から対象物を抽出する(STEP200)対象物抽出手段と、該対象物が人工構造物であるか否かを判定する人工構造物判定手段とを備えて、車両の周辺に存在する物体を監視する車両周辺監視装置であって、前記画像から道路領域を識別する(STEP100)道路領域識別手段を備え、前記人工構造物判定手段は、人工構造物であるか否かの判定を、前記道路領域内で対象物が抽出された場合には第1の人工構造物判定条件に基づいて行い、該道路領域外で対象物が抽出された場合には該第1の人工構造物判定条件と異なる第2の人工構造物判定条件に基づいて行う(STEP500)。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】海などの周期的な揺らぎを伴う監視対象から不審物等を検出するのは困難である。
【解決手段】静止画像データを矩形状の領域に均等に分割する。分割領域毎に特徴量を計算する。各分割領域毎の特徴量と、所定の値との距離を計算する。得られた距離を閾値と比較して、背景であるか否かを判定する。
(もっと読む)
1 - 20 / 50
[ Back to top ]