
Fターム[5C054FC03]の内容
閉回路テレビジョンシステム (47,623) | 映像解析処理 (5,931) | 輝度解析 (433)
Fターム[5C054FC03]の下位に属するFターム
Fターム[5C054FC03]に分類される特許
1 - 20 / 275
画像信号処理装置
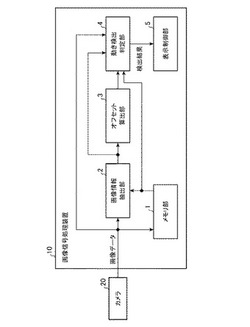
【課題】対象物の動き検出の誤判定を抑制する画像信号処理装置を提供する。
【解決手段】画像情報抽出部2が抽出した輝度平均値を参照し、現フレームの画像ブロックの輝度平均値と、現フレームの画像ブロックと同一地点に位置する参照フレームの画像ブロックの輝度平均値との差分が閾値以上であった場合に、現フレームの画像ブロックと参照フレームの画像ブロックとの間で輝度変化が発生したと判定すると共に、画像データの明るさの変化による輝度変化の変化量を差し引くためのオフセット値を算出するオフセット算出部3と、該オフセット値を考慮して、現フレームの画像ブロックの画素値と、現フレームの画像ブロックと同位置の参照フレームの画像ブロックの画素値との差分が閾値以上であるか判定を行い閾値以上であった場合に、当該画像ブロック内に動きを有する対象物が存在すると検出する動き検出判定部4とを備える。
(もっと読む)
車両の運転支援装置

【課題】運転者が車両の前方の状況を確認し易いようにカメラの撮像画像を運転者に対して表示することができる車両の運転支援装置を提供する。
【解決手段】運転支援装置1は、カメラ3aの撮像画像を表示する表示手段4,7と、所定の条件が成立する場合にカメラ3aの撮像画像から運転者の注意を喚起すべき対象物を検出し、対象物を検出した場合に運転者の注意を喚起するための処理を実行する注意喚起処理手段8とを備える。カメラ3aの撮像画像の表示モードは、撮像画像の一部の領域(小画角領域)を拡大して表示する小画角領域表示モードと、小画角領域を含む広角領域を表示する広角領域表示モードとがある。表示手段4,7は、前記所定の条件が成立する場合には、小画角領域表示モードにて撮像画像を表示し、前記所定の条件が成立しない場合には、広角領域表示モードにて撮像画像を表示する。
(もっと読む)
表面パターンの検出方法及び装置
【課題】本実施形態では、検査対象物が各種のものであっても、柔軟に対応して検査目的を達成できる表面パターンの検出方法及び装置を提供する。
【解決手段】この実施例では、予め撮像した参照用検査対象物の撮像信号に基づく参照用パターンデータを用意し、検査用対象物を撮像した撮像信号に基づくリアル撮像パターンデータを取得し、前記リアル撮像パターンデータを前記検査用対象物のリアル速度情報に基づき圧縮及び又は伸張して修正パターンデータを生成し、前記修正パターンデータと前記参照用パターンデータを比較して、類似か非類似を判定し、判定結果を示す信号を出力する。
(もっと読む)
車載カメラ制御装置、車載カメラ制御システム及び車載カメラシステム
【課題】 駐車時に消費電力を抑制しつつ、車両の周囲の監視対象物の監視をすることが可能な車載カメラ制御装置等の提供。
【解決手段】 車載カメラ制御装置は、赤外線画像データと可視画像データを取得する画像取得部110と、走行モードと防犯モードとを含む複数の処理モードのうちのいずれかの処理モードを、使用処理モードとして設定するモード設定部130と、処理部120とを含む。処理部120は、使用処理モードとして走行モードが設定されている場合には、可視画像撮像部220を通常駆動状態に設定し、可視画像データと赤外線画像データとに基づいて、報知用データの生成処理を行い、使用処理モードとして防犯モードが設定されている場合には、可視画像撮像部220を、動作オフ状態又は通常駆動状態よりも消費電力が低い省電力状態に設定し、赤外線画像データに基づく監視対象物の検出処理を行う。
(もっと読む)
画像処理装置、画像処理システム、カメラ、カメラシステム
【課題】表示画面内の対象物の存在を認識しやすい画像を提供し、危険予知を容易にすることができる画像処理装置、画像処理システム、カメラ、カメラシステム等を提供すること。
【解決手段】画像処理装置100は、赤外線画像データを取得する画像取得部110と、画像取得部110により取得された赤外線画像データに基づく画像領域に対して、画像領域内での対象物を検出する画像処理を行うアラート表示領域と、画像領域内での対象物を検出する画像処理を行わないアラート非表示領域とを設定する領域設定部120と、アラート表示領域の赤外線画像データに基づいて、アラート表示領域における対象物の検出情報を含むアラート表示の画像処理を行ってアラート表示を含む表示用画像データを生成する処理部130とを含む。領域設定部120は、境界線を用いて画像領域を区画する設定パターンを決定し、境界線の位置及び形状のうちの少なくとも一つを定める。
(もっと読む)
撮影表示制御システム
【課題】可視光および近赤外光の信号を用いた輝度の計算方法を切り替えることのできる撮影表示制御システムにおいて、車両の走行シーンに応じた適切な切り替えを行えるようにする。
【解決手段】撮像素子22が受光した可視光および近赤外光の強度に基づいて、各画素の輝度を算出する信号処理部23と、信号処理部23が算出した各画素の輝度に基づいた画像をディスプレイ9に表示させる画像認識部8と、を備え、画像認識部8は、可視光に基づく映像信号を出力するカメラ3から受けた映像信号に基づいて、近赤外光を強く反射または放出する被写体としてあらかじめ設定された被写体を画像認識によって探索し、探索の結果近赤外光を強く反射または放出する被写体が見つからなかった場合は、第1の算出方法で各画素の輝度を算出し、見つかった場合は第1の方法よりも輝度に対する近赤外光の強度の寄与が低くなるような第2の算出方法で各画素の輝度を算出する。
(もっと読む)
全方位監視画像表示処理システム
【課題】単眼カメラで撮影した各フレーム単位の360°監視映像について、その全体映像を細部に亘り明瞭に表示できるとともに、360°監視映像から切り出した切り出し画像に対して細部に亘り明瞭に表示することができる。
【解決手段】ブロッキング輝度伸張処理部20は、画像バッファメモリ13に記憶された楕円面の360°全周入力画像(Pa)とオブジェクト画像バッファメモリ19に記憶された切り出し画像(オブジェクト画像)を処理対象に、表示出力する画像に対して画素単位のブロッキング輝度伸張処理を実施する。
(もっと読む)
全方位監視画像処理システム
【課題】単眼カメラで撮影した各フレーム単位の360°監視映像について、その全体映像を細部に亘り明瞭に表示できるとともに、360°監視映像の一部に存在する監視対象物となる動物体若しくは静物体を細部に亘り明瞭に表示することができる。
【解決手段】ブロッキング輝度伸張処理部20は、画像バッファメモリ13に記憶された楕円面の360°全周入力画像(Pa)とオブジェクト画像バッファメモリ19に記憶された切り出し画像(オブジェクト画像)を処理対象に、表示出力する画像に対して画素単位のブロッキング輝度伸張処理を実施する。
(もっと読む)
通行監視システム
【課題】複数の監視カメラを用いることなく監視カメラの死角を解消することにより、立入制限エリアへの非許可者の不正侵入を確実に監視し得る通行監視システムを得る。
【解決手段】通行監視システムは、所定の出入口の近傍領域を第1方向から撮影するカメラ1と、カメラ1の画角内において、第1方向とは異なる第2方向から出入口の近傍領域が映るように配置された鏡11と、カメラ1によって撮影された映像内の鏡11に映し出された第1映像と、カメラ1によって第1方向から出入口の近傍領域を撮影した第2映像とに基づいて、出入口を通行する人物が一か複数かを判定する処理部4とを備え、処理部4は、第1映像に基づき第1のアルゴリズムを用いて人物の単複判定を行い、第2映像に基づき第1のアルゴリズムとは異なる第2のアルゴリズムを用いて人物の単複判定を行う。
(もっと読む)
歩行者検出装置
【課題】監視エリアを所定時間毎に撮影して取得した画像を処理して、監視エリア内の歩行者を検出するときの検出精度を高める。
【解決手段】監視エリア100内を歩行者101が矢印102の方向に移動する。歩行者101の足は片方ずつ交互に動き、交互に静止する。領域103、104、105内の静止部分の下端の中心間距離は歩幅に対応し、領域103、104、105内の静止部分の発生周期は歩行周期に対応する。背景差分により異物画像201を検出し、フレーム間差分により移動物体画像202を検出する。背景差分とフレーム間差分との差分により、異物画像中の静止領域画像204を抽出する。隣り合う静止領域画像204の下端の中心間距離、発生周期が、歩幅、歩行周期に対応すれば、歩行者であると判定する。
(もっと読む)
移動物体監視システム
【課題】進入監視エリアに対する物体の移動を効果的に検知して、小さな処理負担で移動物体を監視できる移動物体監視システムの提供。
【解決手段】カメラの撮影視野内で進入監視エリアの外側に任意に設定される第1指標帯の画像領域である第1画像領域と、この第1指標帯との間に任意に設定される第2指標帯の画像領域である第2画像領域を撮影画像から抽出する画像抽出部と、第1・第2画像領域の画像特徴量である第1・第2画像特徴データを算定する特徴量算定部と、第1・第2画像特徴データに基づいて進入監視エリアに対する物体移動を評価するための物体移動評価データを演算する評価データ演算部と、物体移動評価データの経時変化に基づいて進入監視エリアへの物体の進入又は退出あるいはその両方を推定する物体移動推定部とが備えられている。
(もっと読む)
画像処理方法及び装置
【課題】画像の高周波成分を維持しつつノイズ成分を除去する。
【解決手段】実施形態によれば、画像処理方法は、N(Nは3以上の整数)枚の入力画像の平均画像を平滑化し、平滑化画像を得ること(S203)と、N枚の入力画像から平滑化画像をそれぞれ減算し、N枚の高周波画像を得ること(S204)とを含む。画像処理方法は、N枚の高周波画像に対して因子分析を行い、N枚の高周波画像にそれぞれ対応する因子負荷量を算出すること(S205)と、因子負荷量に基づいてN枚の高周波画像を合成し、合成画像を得ること(S206)とを含む。画像処理方法は、平滑化画像と合成画像とを加算し、出力画像を得ること(S207)を含む。
(もっと読む)
インターホンシステム
【課題】 人物を検出する機能を設けることなく、表示映像における人物の視認性を高める。
【解決手段】 集合玄関機1に、カメラ2の撮像映像を表示する子機モニタ14と、露光の最適化処理に使用する測光領域と測光量の重み付けのパラメータを記憶するパラメータ記憶部16と、パラメータを変更或いは設定操作する操作部17と、パラメータの変更或いは設定を制御する子機CPU24と、現在の日時を記憶するためのリアルタイムクロック23と、設定されたパラメータを用いてカメラ2の撮像映像を処理して子機モニタ14に表示させ、またパラメータ記憶部16に記憶されたデータを使用して映像処理して居室親機3へ伝送する映像処理部11とを設け、パラメータ登録操作されたらパラメータにリアルタイムクロックの日時情報が添付されてパラメータ記憶部16に登録される。
(もっと読む)
並走物体検知装置
【課題】背景を、並走物体であると誤検知する可能性が低い並走物体検知装置を提供する。
【解決手段】並走物体検知装置10は、自車両(並走物体検知装置10を搭載した車両)の側方の様子を示すカメラ20からの映像データに所定の監視領域を設け、該監視領域内の自車両近傍の所定領域の映像データのみを対象として並走物体を検知する機能を有する。
(もっと読む)
追尾装置およびその制御方法
【課題】追尾対象の特徴をもとに追尾を行う際に、誤追尾の発生を高精度に検出可能な追尾装置および方法を提供する。
【解決手段】動画像において追尾対象の位置を追尾する追尾装置は、現在の処理対象のフレーム画像に対して前記追尾対象の特徴情報を用いた被写体の追尾処理を実行することにより、今回の追尾対象位置を検出し、当該処理対象のフレーム画像から今回の追尾対象位置と前回の追尾対象位置との間にある画像を抽出し、抽出された画像と特徴情報との類似度に基づいて検出された追尾対象位置が追尾対象外であるか否かを判定する。追尾装置は、検出された追尾対象位置が追尾対象外でないと判定された場合には、上記今回の追尾対象位置を、上記判定で使用される前回の追尾対象位置として保持する。
(もっと読む)
画像表示システム、画像処理装置及び画像表示方法
【課題】互いに離間した複数の乗降口を一の側面に有する旅客車両において、乗務員が旅客の乗降の安全確認を適切に行うことができるようにする。
【解決手段】画像表示システムにおいては、前乗降口の近傍の領域を示す部分画像SP1と、後乗降口の近傍の領域を示す部分画像SP2とが生成される。これら二つの部分画像SP1,SP2のうち、物体が検出された乗降口に対応する部分画像のみが表示装置に表示される。このため、安全確認が必要な乗降口のみに対して乗務員の注意を向けさせることができる。その結果、乗務員が旅客の乗降の安全確認を適切に行うことができる。
(もっと読む)
画像認識装置、画像認識方法及びプログラム
【課題】画像中の被写体を精度良く追尾できるようにする。
【解決手段】入力された画像から被写体領域を特定し、前記特定された被写体領域の位置を代表する注目点を算出して前記被写体領域を追尾する画像認識装置であって、前記注目点を含む領域が前記被写体領域と異なる領域である場合には前記注目点の位置を前記被写体領域の内部に補正し、前記補正された位置の注目点に基づいて前記被写体領域を追尾するようにして、例えば、ドーナツ型の形状の被写体を検出する場合も精度良く被写体を追尾できるようにする。
(もっと読む)
特定人物検知システムおよび検知方法
【課題】特定人物検知システムおよび特定人物検知システム方法は、検知の高精度化、即ち、見逃しや誤検知の低減を図る。
【解決手段】撮影画像中から任意の登場人物を検知する手段と、特定人物の一覧と登場人物との特徴照合から類似性を求め、特定人物検知を行う手段を有する、撮像装置と検知装置と端末装置から構成される特定人物検知システムにおいて、登場人物の撮影条件を求める手段と、最類似人物の撮影条件を求める手段と、両条件の比較から次の撮影条件の方向性を判断する手段と、該判断に従い撮像装置を制御する手段と、該制御から得られる複数条件下の撮影画像を用いて特定人物検知を行う手段を設けた。
(もっと読む)
監視システムおよび監視方法
【課題】監視対象となる領域を監視する監視システムで、環境変化によって監視システムに不適応な映像が得られた状態を効果的に監視員に提示する。
【解決手段】監視システムにおいて、撮像装置より撮像した画像が物体検出に適応した画像であるかを判断する映像状態診断手段より、物体検出に適応または不適応な映像状態の情報を取得する。映像状態診断手段は、適応判断テーブルに記憶した値を用いて映像状態を判断する。物体検出に不適応な映像状態の情報を取得した場合は、表示装置に監視対象となる領域内の環境異常を表示する。
(もっと読む)
内視鏡診断装置
【課題】位置の異なる2つの照明窓から照明光を照射して撮像された画像信号に現れる配光分布の違いを正しく補正することができ、正確な狭帯域光画像を得ることができる内視鏡診断装置を提供する。
【解決手段】内視鏡診断装置は、異なる位置に配置された第1および第2の照明窓を有し、第1の照明光を第1の照明窓から照射して撮像した第1の画像の画像信号、第3の照明光を内視鏡スコープの先端部に配置された蛍光体に照射することによって、蛍光体から発せられる疑似白色光である第2の照明光を第2の照明窓から照射して撮像した第2の画像の画像信号、および、第3の照明光を第1の照明窓からもしくは第1の照明光を第2の照明窓から照射して撮像した第3の画像の画像信号を取得する内視鏡装置と、第1および第2の画像の画像信号に現れる第1および第2の照明光の配光分布の違いを、第3の画像の画像信号を用いて補正する配光分布補正手段とを備える。
(もっと読む)
1 - 20 / 275
[ Back to top ]