
Fターム[5C122DA27]の内容
スタジオ装置 (397,422) | スタジオ装置の用途/種類 (48,563) | カメラ (47,519) | ロボット (65)
Fターム[5C122DA27]に分類される特許
21 - 40 / 65
カメラ付きロボット
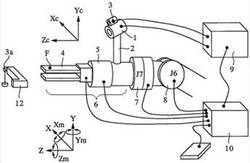
【課題】 ロボットアームに搭載されるカメラのシャッターチャンスを最適化し、組立作業効率を向上させる。
【解決手段】 フィンガー4上の点Fと、カメラ1の位置基準であるアライメントマーク3aに対する位置をカメラ1によって撮像し、画像処理によってカメラ1の位置を計測する。カメラ1の位置が予め設定された位置閾値以下で、かつ、カメラ1に搭載された速度センサ3によって計測されるカメラ1の移動速度が予め設定された速度閾値以下である時にカメラ1のシャッターを切る。あるいは更に、速度センサ3の微分値によって計測されるカメラ1の移動加速度が予め設定された加速度閾値以下である時と論理積を取ってシャッター切る。これによって、ワーク12を探索するための画像のブレを防ぎ、位置誤差を低減するとともに、シャッターを早く切ることで作業効率を向上させる。
(もっと読む)
背景画像推定に基づく物体検出方法及び物体検出装置

【課題】容易かつ低コストに移動物体の形状を検出でき、これによって移動物体の動作や挙動の認識も可能な背景画像推定に基づく物体検出方法及び物体検出装置を提供する。
【解決手段】徐行移動可能な1つの画像入力手段を用い、予め設定した時間間隔で撮影された複数の画像フレームFi−1、Fiの背景画像10から、移動物体画像11を検出する物体検出方法及び物体検出装置であって、背景画像推定手段により、画像フレームFiを構成する画素12ごとに、画像フレームFi−1を用いて画像フレームFiを構成する画素12の濃度値の正規分布を求め、画像フレームFiの各画素12の濃度値とその正規分布との比較から背景画像10を推定し、移動物体画像11を得る。
(もっと読む)
画像伝送装置
【課題】 ロボットアームに複数のカメラを設置し画像伝送路の数を、カメラ台数分より削減するためには、単一の伝送路に画像信号を多重化する必要がある。従来例のように多重化すると画像データの転送効率の低下を招いてしまう上、複数カメラで同時刻に撮影した画像を得ることができない。また画像データ分割方式では回路が複雑化する。
【解決手段】 入力される複数の画像伝送路の画像データをフレームごとに選択して単一伝送路に送信して多重化する画像伝送路選択手段と送信手段をもち複数の画像伝送路の画像データを選択してフレームごとにメモリに書き込む書き込み回路と画像メモリをもち、必要部分の画像データを読み出す読み出し回路を持ったので画像伝送路を削減しつつ伝送効率を上げることができ、なおかつ同時刻に撮像した画像データを画像処理に用いることができる。
(もっと読む)
視覚追跡のための適応型判別生成モデル及び逐次的フィッシャー判別分析並びにアプリケーション
【課題】オブジェクトの移動位置を正確に追跡する。
【解決手段】コンピュータは、デジタル画像フレームのシーケンス内の画像フレームを表す画像ベクトルを受け取り、画像ベクトルから、画像フレーム内におけるオブジェクトの初期位置を決定し、画像ベクトルに対して動的モデルを適用し、次の画像フレーム内におけるオブジェクトの少なくとも1つの推測位置を決定し、次の画像フレーム内のオブジェクトの少なくとも1つの推測位置から低次元投影空間に対し、投影パラメータに応じて、サンプルを投影し、前景オブジェクトタイプ及び背景タイプのうちの何れか1つに分類する分類モデルを、次の画像フレームの投影されたサンプルに対して適用し、サンプルに対して推論モデルを適用して、次の画像フレームでのオブジェクトの位置のうち最もあり得る位置を推測し、当該位置に基づいて、投影パラメータを更新する。
(もっと読む)
自己位置推定装置及び自己位置推定方法
【課題】周囲物体を特定する特徴点がロストする可能性を低減し、自己位置推定を継続的に実施可能な自己位置推定の技術の提供する。
【解決手段】移動体1に搭載した撮像装置10により撮像する画像中の特徴点を検出しつつ、移動体1の移動に伴う画像上での上記特徴点の変化から移動体周囲の物体の位置を検出することで、自己位置を推定する。このとき、上記移動体1の動作がその場回転する場合には、移動体がその場回転する前に取得した画像中に位置する特徴点の少なくとも一部を撮像可能な向きに、上記撮像方向を保持する。
(もっと読む)
撮像装置及び撮像方法
【課題】画像取得動作から画像処理までの一連の動作を、撮像条件を変えて複数回行う作業に必要な時間を短縮することができる撮像装置を提供することを課題とする。
【解決手段】少なくとも連続する第1の撮像画像及び第2の撮像画像を取得して画像処理する撮像装置であって、前記第1の撮像画像の画像処理の予定終了時刻及び前記第2の撮像画像の撮像条件設定の予定終了時刻を基に前記第2の撮像画像の取得動作の開始を待機させるウェイト時間を設定するウェイト時間設定部(109)と、前記ウェイト時間設定部により設定されたウェイト時間が経過してから、前記第2の撮像画像の画像取得動作を開始させるように制御するとともに、前記第2の撮像画像の撮像条件設定が終了するまでの期間と前記第1の撮像画像の画像処理が終了するまでの期間との少なくとも一部が重複するように制御する画像取得制御部(110)とを有する撮像装置が提供される。
(もっと読む)
撮像方法、ピッキング方法及びピッキング装置
【課題】ワークと撮像装置との相対位置を変化させながら撮像するときにも、ブレの少ない画像を生成する方法を提供する。
【解決手段】撮像装置を用いてワークを撮像する撮像方法にかかわる。ロボット3を用いて撮像装置20を移動する撮像装置移動工程と、撮像装置移動工程と並行して行われ部品5を撮像する撮像工程と、撮像装置20と部品5とが相対移動する移動軌跡を演算する軌跡算出工程と、移動軌跡の情報を用いて撮像した画像を補正する補正工程と、を有し、撮像装置移動工程ではロボット3の姿勢を検出し、軌跡算出工程ではロボット3における姿勢情報を用いて部品5に対する撮像装置20の移動軌跡を算出する。
(もっと読む)
移動体カメラシステム及び駆動方法
【課題】移動体7にカメラ4を搭載し、移動体7が曲がろうとする方向にカメラの撮像方向を向けて、曲がる方向の外景を撮像する。
【解決手段】移動体7が移動する方向を撮像するカメラ4と、カメラ4により撮像された実写像を表示する表示部6と、移動体7の移動方向の変化を検出して移動方向情報を生成する移動方向検出部2と、カメラ4の撮像方向を移動体7に対して変更するための撮像方向変更部3と、制御部5を備え、制御部5は、移動方向情報に基づいて撮像方向指示情報を生成し、撮像方向指示情報を撮像方向変更部3に与えてカメラ4の撮像方向を移動体7の移動方向が変化する方向に向ける。
(もっと読む)
バーコードを利用した認識方法および認識システム、ならびに、バーコードを利用した制御方法および制御システム
【課題】離れた認識対象物までの距離を、認識対象物の表面の傾きに大きく影響されずに判定でき、且つ、超音波信号や赤外線信号の測定範囲外の距離にある認識対象物との距離を判定できるバーコードを利用した認識方法を提案すること。
【解決手段】ロボット1が走行する直線経路11aの正面にある壁面12aに、異なるサイズの3つのバーコード13a〜13cを垂直に並べたバーコード群13を付しておく。バーコード13a〜13cのサイズを、ロボット1に設置したCCDカメラ7によって判別可能な最大距離がLa〜Lcとなるように設定する。直線経路11aを走行するロボット1のCCDカメラ7を垂直方向に走査して、これらのバーコード群13を撮影し、各バーコードが判別不能から判別可能に、あるいはその逆に切り替わった時点を検出して、切り替わり時点におけるロボット1と壁面12aとの距離を把握する。
(もっと読む)
撮影装置、通信端末、サーバ、撮影方法及び通信方法
【課題】所定の場所に固定され、被撮影者を撮影するとともに、その撮影時の音声も記録することができる撮影装置、通信端末、サーバ、撮影方法及び通信方法を提供する。
【解決手段】所定の撮影エリアAを撮影可能な撮影装置10であって、撮影エリアAに被撮影者Pが存在するときに、被撮影者Pを撮影するための撮影信号を受信する通信手段と、撮影信号に含まれている位置情報に応じて撮影エリアAにいる被撮影者Pを特定し、撮影を実行する撮影部13と、撮影部13の撮影に基いて撮影データを生成する撮影データ生成手段14と、被撮影者側から音声を取得し、音声データを生成する音声データ生成手段15と、撮影データ及び音声データを関連付けて記録するように指示する記録制御手段16を備える。
(もっと読む)
高速視覚センサ装置
【課題】 簡単な回路構成で、複数の画像間に対しても効率的に高速演算処理が可能な多画素数の高速視覚センサ装置を提供する。
【解決手段】 受光素子アレイ11の各列の受光素子120に対して1個のA/D変換器210を対応させたA/D変換器アレイ13と、受光素子120と1対1に対応する演算素子400と転送用シフトレジスタ410からなる並列処理機構14とを備えている。演算素子400は並列処理により近傍画素間の画像処理演算を高速で行うことができるとともに、転送用シフトレジスタ410における転送処理と独立して演算処理が行えるので、演算処理、転送処理を効率良く行うことができる。
(もっと読む)
複合メディア合成装置及び複合メディア表示システム及び複合メディア合成方法及び複合メディア合成プログラム
【課題】3次元形状を計算することが困難な箇所がある領域の3次元地図として、有用なものを作成することを目的とする。
【解決手段】複合メディア合成装置120の3次元地図作成部123は、移動可能な計測装置に搭載されたカメラ、レーザスキャナ、ステレオカメラの出力するデータの少なくともいずれかを用いて計測装置の周辺領域の3次元地図を構築する。メディア合成部125は、カメラの出力する映像データから、3次元地図作成部123が3次元地図を作成できない領域(カメラやステレオカメラで撮影しても映像の精度が悪くなる領域、レーザスキャナのレーザが到達する範囲外の領域)以外の領域の映像を抽出し、抽出した映像と3次元地図作成部123が作成した3次元地図とを合成する。
(もっと読む)
情報処理装置及び情報処理方法
【課題】現実空間に存在する表示装置の表示画面に表示されている指標を、現実空間に存在する指標として誤検出することを精度良く防止できるようにする。
【解決手段】指標検出部1040は、撮像装置1010から出力される撮像画像データから指標及びその画像座標を取得し、位置姿勢算出部1050は、その取得した画像座標と、uQknと、既知な情報として予め保持されている世界座標xWQknとから撮像装置1010の位置及び姿勢を算出する。さらに、誤検出防止処理部1060は、前記算出した撮像装置1010の位置及び姿勢と、予め保持されている世界座標xWQknとから指標候補領域を探索し、指標検出部1040において検出されなかった指標を検出して、その部分に図形又は小画像を重畳する。
(もっと読む)
コンパクトながら高機能の水中撮影用ストロボ
【課題】超小型で軽量であり、水中撮影に伴う労苦を軽減し、より優れた内容の水中撮影を可能にする水中撮影用ストロボを提供する。
【解決手段】閃光放電管、電源、昇圧回路、コンデンサ、トリガー回路、光量制御回路等を防水函体に収納した水中撮影用ストロボであって、撮影モード選択スイッチの回路切替え操作で、いずれか片側がアクティブになる様切替え出来る、TTL撮影制御回路部と、マニュアル撮影制御回路部とに、それぞれに、発光・中途停止・信号出力部が付設されており、TTL撮影制御回路部に付設の発光・中途停止・信号出力部のみが、調光確認信号部と接続され、TTL自動調光撮影完了時のみ、発光・中途停止の信号が、調光確認信号回路に伝達され、表示灯が点灯する様に回路構成されていることを特徴とする、コンパクトながら高機能の水中撮影用ストロボとする。
(もっと読む)
コンパクトながら高機能の水中撮影用ストロボ
【課題】超小型で軽量であり、水中撮影に伴う労苦を軽減し、より優れた内容の水中撮影を可能にする水中撮影用ストロボを提供する。
【解決手段】閃光放電管、電源、昇圧回路、コンデンサ、トリガー回路、光量制御回路等を防水函体に収納した水中撮影用ストロボであって、略円柱型の水中撮影用ストロボの内部の略円形縦断面に、略円形のストロボ発光パネルと、略円形の部品回路基板、1枚ないし複数枚とが積層配列されていることを特徴とする、コンパクトながら高機能の水中撮影用ストロボとする。
(もっと読む)
3次元情報検出装置
【課題】1台のカメラで同時に撮像した被写体の2次元画像群を基にして被写体の3次元情報を検出することを図る。
【解決手段】空間的又は時間的に強度変調された強度変調光を発生する距離検出用光源部10と、被写体で強度変調光が反射された反射光を透過する複数のレンズ15が多眼的に配置されたレンズアレイ14と、複数のレンズ15の各々を透過した透過光を2次元撮像素子の結像面で各々結像させて、複数のレンズ15の各々に対応する被写体画像群を撮像し、該被写体画像群に基づいて被写体の3次元情報を検出する3次元カメラ16と、を備える。
(もっと読む)
撮像方向決定プログラム
【課題】現在位置の推定用に適した画像を撮像することを課題とする。
【解決手段】撮像装置によって現在位置の推定用の画像が撮像される直前に、移動ロボットの移動範囲を示すグリッドマップ上の目標物までのグリッド間距離を移動ロボットが撮像可能な方向ごとに算出する。続いて、予め保持する撮像距離と測距精度との関係を用いて、グリッド間距離から撮像された画像を現在位置の推定に用いた場合の推定精度値を撮像装置の撮像方向ごとに算出する。そして、目標物を実際に撮像する際の撮像方向を、推定精度値が最大値となる撮像方向に決定する。
(もっと読む)
スマートカメラ及びロボットビジョンシステム
【課題】ロボットの各種制御等に際し、ネットワークを介してのより自由度の高い、しかもより効率のよいデータ授受を可能とするスマートカメラ、及び該スマートカメラを備えるロボットビジョンシステムを提供する。
【解決手段】スマートカメラは、第1コマンドインタフェースCIF1(以下、CIF1)と第2コマンドインタフェースCIF2(以下、CIF2)とを有する。画像処理プロセスDPはCIF1から入力される指令に基づいて撮像データDT1を画像処理し、ロボットの制御に有益な情報からなる結果データDT3を生成してこれを結果データバッファDB3に保存し、またCIF1に出力可能にする。一方、イメージセレクタSWはCIF2から入力される指令に基づいて撮像データDT1または処理画像データDT2のいずれかをモニタ画像データとして選択してこれをCIF2から出力する。
(もっと読む)
移動ロボット
【課題】来訪が予約されている来訪者を応接場所まで的確に案内するようにした移動ロボットを提供する。
【解決手段】作業環境Eを移動して来訪者Pを案内する移動ロボット10において、作業環境Eの地図情報と来訪者Pに関する予約情報を格納するデータベースに無線系Rと基地局Bと第1のネットワークN1からなる通信ネットワークを介してアクセスして地図情報と来訪者Pに関する予約情報を取得すると共に、来訪者Pに関する予約情報に基づいて前記作業環境Eにおいて来訪者Pを識別し、来訪者Pが識別されたとき、地図情報に従って応接場所(会議室n)まで来訪者Pを案内する。
(もっと読む)
撮像装置
【課題】筐体内部への水または水分の浸入を抑制することができる環境耐久性に優れた撮像装置を提供する。
【解決手段】被写体を撮像する撮像部40と、撮像部40を収容する筐体10と、筐体10の開口部に取り付けられ、撮像部40を保護するガラス板20と、開口部の内周面に形成されたガラス板支持面12とガラス板20の外周面21との間の空隙部を封止する封止材30と、を有する撮像装置であって、開口部のガラス板支持面12を、外部から浸入する水または水分の浸入経路が長くなるように形成している。
(もっと読む)
21 - 40 / 65
[ Back to top ]