
Fターム[5C122DA27]の内容
スタジオ装置 (397,422) | スタジオ装置の用途/種類 (48,563) | カメラ (47,519) | ロボット (65)
Fターム[5C122DA27]に分類される特許
61 - 65 / 65
全方位撮像装置

【課題】 曲面ミラーの支持手段として透明支持手段を用いると共に、その内面反射の影響を完全に取り除く手段を備えた全方位撮像装置を実現する。
【解決手段】 全方位からの入射光を反射する曲面ミラーと、このミラーからの反射光を受光する撮像手段よりなる全方位撮像装置において、
前記曲面ミラーを支持し、全方向からの前記入射光を透過可能に配置された透明支持手段と、
この透明支持手段の内面で反射する、前記入射光と同一の光路を有する内面反射光に対し、前記内面への入射を妨げる遮蔽手段と、
を備える。
(もっと読む)
ロボット装置

【課題】 低コストで、しかも従来よりCPUやメモリに掛かる負荷を軽減して、対象物を追跡することが可能なロボット装置を提供する。
【解決手段】 所定の行動面上を行動するロボット装置であって、対象物を含む視野からの入射光を前記行動面と略平行な方向に集光する集光レンズ12と、集光された光を受光して信号に変換する複数の光電変換素子とを有するカメラユニット部と、
前記複数の光電変換素子からの出力信号に基づいて対象物の方位を求め、当該方位に応じた方向に前記カメラユニット部を向ける行動を生成する行動生成部とを備える。
(もっと読む)
視覚装置の画像処理方法および画像処理装置
【課題】魚眼レンズにより得られる広い視野角の画像から必要な解像度の平面画像を得るための視覚装置の画像処理方法ならびに画像処理装置を提供する。
【解決手段】魚眼レンズを備えたカメラ(1)と、該カメラの向きの変更手段(アクチュエータ2)とを備えた視覚装置において、所定解像度の領域を設定して(ステップ1)カメラで撮像する過程(ステップ2)と、カメラで撮像した画像を所定解像度に基づく解像度の平面画像に変換する過程(ステップ3)と、平面画像における所定解像度の領域内に対象物が存在するか否かを判別する過程(ステップ6)と、所定解像度の領域内に対象物が存在しないと判定された場合に所定解像度の領域内に対象物を捉えるようにカメラの向きを変更する過程(ステップ8)とを経て画像処理が行えるようにする。
(もっと読む)
撮像装置及び画像補正方法
【課題】傾きが補正された球面画像を容易に精度良く形成可能な撮像装置及び画像補正方法を提供する。
【解決手段】 撮像装置1は、カメラ10を有し、カメラ10で取得された被写体像16の画像データから球面画像形成手段31が、カメラ10のカメラ座標系Ccで表される球面画像40を形成する。また、撮像装置1は、実空間での重力方向に対するカメラ座標系Ccの傾きを検出する傾き検出センサ50を有し、撮像装置1の画像補正手段32は、この傾き検出センサ50の検出結果に基づいて、カメラ座標系Ccを回転させて球面画像空間での重力ベクトルGsを重力方向と一致させることで、球面画像40の傾きを補正する。
(もっと読む)
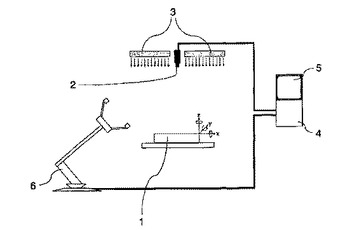
物体の3D位置の非接触式光学的測定方法及び測定装置
この発明は物体の3D位置、すなわち、ある幾何学的特性が公知の物体の3D位置及び3D配向の非接触式光学的決定のための方法及び装置に関する。前記発明の目的は単純な手段で、高測定速度、精度で、調査物体に関する完全な3D情報を調査することである。この目的のため、物体画像がカメラによって生成され、その生成画像に基づく物体の3D位置が、検出幾何学的特性に関する画像情報によって計算される。
 (もっと読む)
(もっと読む)
61 - 65 / 65
[ Back to top ]