
Fターム[5C122EA33]の内容
Fターム[5C122EA33]に分類される特許
61 - 80 / 205
光学機器

【課題】撮影された画像が歪曲することなく広い画角をカバーできる光学機器を提供すること。
【解決手段】被写体の像を撮像する撮像素子に前記被写体の像を結像する撮像光学系と、前記撮像光学系および前記撮像素子を備えた筐体とを有し、前記撮像素子と前記撮像光学系とが、所望の被写体の動きに追従して前記筐体に対して上下方向または左右方向の少なくとも一方向に動くことが可能であることを特徴とする光学機器。
(もっと読む)
電子カメラ

【構成】撮像装置18は、被写界を捉える撮像面を有して被写界像を出力する。CPU30は、被写界に存在する物体上の複数の位置までの距離を撮像装置18から出力された被写界像に基づいて検出する。CPU30はまた、この物体に対する撮像面の傾きを上述の要領で検出された距離に基づいて算出し、算出された傾きを参照した座標変換処理を撮像装置18から出力された被写界像を形成する複数の画素に対して実行する。
【効果】簡便な処理で、物体を正面から捉えたように被写界像を補正することができる。
(もっと読む)
画像処理装置及び画像処理方法等
【課題】広角レンズを用いて撮像された画像を二次元的な平面画像へ変換し表示するために、撮像された画像に対してRGB変換回路によるRGBカラー変換を施し、歪補正回路による歪補正を施して平面画像へ変換する画像処理装置及び画像処理方法等を提供する。
【解決手段】補間演算部12は、魚眼レンズによって撮像された魚眼画像を示す入力データに基いて、平面画像を示す出力データを生成し、前記平面画像をディスプレイモニタ5へ表示する。
(もっと読む)
立体撮像装置および立体撮像方法
【課題】連続的なズーミング中でも撮影者にとって見やすい立体画像を表示すること。
【解決手段】ズームレンズをそれぞれ有する第1の撮像系11Rおよび第2の撮像系11Rと、ズームレンズの離散的な位置ごとに、第1の撮像系11Rと前記第2の撮像系11Lとの光学特性差の補正に用いる補正値を記憶するEEPROM118と、駆動パルス単位でズームレンズの現在位置を検出するズームパルス検出部170と、現在位置が離散的な位置の間にある場合、EEPROM118に記憶されている補正値に基づいて現在位置に対応する補正値を算出する補正値補間部174と、現在位置が離散的な位置の間にある場合、補正値補間部174により算出される補正値を用いて第1の撮像系11Rと第2の撮像系11Lとの光学特性差を補正する補正部176を備えた。
(もっと読む)
軌跡に基づいて画像センサーを読み出すための方法とシステム
光学システムは、視野内の物体の歪んだ画像を、画像捕捉装置の感応ピクセル上に提供することができる。光学システムは、視野の中心で画像を拡張し周縁で画像を圧縮するかまたはその他の歪みを導入することができる。光学システムによって意図的に導入された歪みは、歪みのいくつかまたは全てを除去するために感応ピクセルが読み出された時に訂正され、それにより「修正された」画像を作成する。ピクセルは、全てかまたは実質的に全ての感応ピクセルが読み出されるまで待つのではなく、ピクセル読み出し中に歪みを修正するために歪んだ画像の曲率マップに対応する軌跡に沿って読み出されることができる。センサーロジックおよび/またはアルゴリズムが、歪みを除去するのに使われることができる。 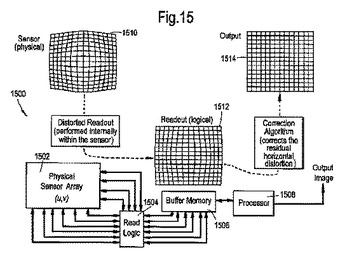 (もっと読む)
(もっと読む)
画像通信システム
【課題】超広角レンズや魚眼レンズ等の広角レンズを用いた撮影により生じた歪みを補正した画像における画質の劣化を低減できる画像通信システムを提供する。
【解決手段】カメラ3は、超広角レンズを用いて生成された撮像画像11から注目領域13を切出し、注目領域13の符号化データを送信する。端末装置5は、符号化データを復号し、歪みを補正する。歪み補正処理は、撮像画像空間から補正画像空間への座標変換によって、広角レンズを用いた撮影により生じた歪みを補正する。超広角レンズ等の広角レンズは、座標変換において参照される補正前画像の単位面積当たりの座標データの数が、撮像画像の撮像中心からの距離に応じて異なる特性を有する。符号化部は、撮像中心から注目領域内の各符号化ブロックまでの距離に応じて、各符号化ブロックへ符号量を割り当てる。
(もっと読む)
カメラおよび画像補正方法
【課題】撮影画像に生じる歪曲を高精度に低減することが可能な構成のカメラを提供する。
【解決手段】撮像レンズ3により画像を形成するカメラ1において、撮像レンズ3の焦点距離と、撮像レンズ3への被写体からの光線の入射角とに基づいて、画像の歪曲を補正する際に、入射角に応じて補正の量を変更する歪補正部44を備えて構成する。
(もっと読む)
画像通信システム
【課題】歪み補正をカメラ側で行う必要がなく、画質が良好であり、通信データ量を低減できるという効果を有する画像通信システムを提供する。
【解決手段】カメラ3は、超広角レンズ31を用いて撮像画像を生成する撮像部33と、撮像画像から注目領域を切り出すと共に、注目領域を含む背景領域よりも広い拡張領域を切り出す領域切出部35を備える。拡張領域を、注目領域と比べて大きな更新間隔をあけて端末装置5に送信される。端末装置5は、受信した拡張領域を記憶する拡張領域記憶部59と、拡張領域から注目領域を含むように背景領域を切り出し、注目領域と背景領域を合成する画像合成部57と、超広角レンズ31を用いた撮影により生じた歪みを補正する歪み補正部61とを有する。拡張領域が受信されるたびに、拡張領域記憶部59の拡張領域が更新される。
(もっと読む)
カメラ装置、表示装置、画像処理システムおよび画像処理方法
【課題】 レンズの歪み特性を考慮した適切な比率で切出し画像を縮小することができ、表示装置への切出し画像の伝送効率が向上することのできる画像処理システムを提供する。
【解決手段】 画像処理システム1では、広角撮影用のレンズを用いてカメラ装置2で撮影された歪み画像の一部が切り出されて表示装置3へ送信され、表示装置3でレンズの歪み特性に応じた歪み補正が行われる。カメラ装置2は、表示装置3で表示される歪み補正後の表示画像の大きさに対応する画角情報を、表示装置3から受信する受信部と、表示装置3から受信した画角情報に基づいて、表示画像に対応する歪み領域が含まれる切出し画像を歪み画像から切り出す画像切出し部8と、レンズの歪み特性に基づいて、表示装置3から受信した画角情報から算出した比率で切出し画像を縮小する画像縮小部9と、を備える。
(もっと読む)
画像処理装置及び撮像装置
【課題】歪み補正画像に対して高周波数成分を十分に与え、周辺部においても良好な解像感を得ることができるようにする。
【解決手段】 入力画像(Din)を歪み補正した第1の歪み補正画像を出力する第1の歪み補正手段(2A)と、入力画像(Din)の高周波数成分を取り出した高周波数成分画像(D1)を生成する高周波数成分画像生成手段(1)と、高周波数成分画像(D1)を歪み補正した第2の歪み補正画像(D2B)を出力する第2の歪み補正手段(2B)と、第2の歪み補正画像(D2B)を処理した高周波数成分画像(D3)を生成する高周波成分画像処理手段(3)と、高周波数成分画像(D3)にゲインを乗算して高周波数成分画像(D7)を出力する調整手段7を有し、第1の歪み補正画像(D2A)と高周波数成分画像(D7)を加算した結果を、入力画像(Din)を歪み補正した結果(Dout)として出力する。
(もっと読む)
情報処理装置、撮影装置、および情報処理装置の制御方法
【課題】 特殊なレンズにおいても、ユーザーが意識することなく最大の光学補正効果を可能にすること。
【解決手段】 マクロレンズのような、通常のレンズとは光学特性が大きく異なるレンズの光学補正においても、ユーザーが特に意識することなく、自動的に補正が可能なパラメータから作成された補正データを用いることによって十分な補正効果を得ることができるようになる。さらに、上記特殊パラメータに対応していない機種においても最大限の補正効果を得る為に補正データを作成し、機種毎に登録データを変更する。
(もっと読む)
画像歪み補正装置
【課題】水平方向の補正を行うのみで、垂直方向の画像の歪みも低減させることのできる画像歪み補正装置を提供する。
【解決手段】画像歪み補正装置は、画像データの画素間隔の圧縮伸張倍率がライン・水平位置ごとに記述された圧縮伸張倍率テーブル3を備えており、バッファメモリ1が、入力画像データを順次蓄積し、ライン・水平位置情報検出部2が、バッファメモリ1から読み出された画像データのラインおよび水平位置の情報を検出し、圧縮伸張倍率読み出し部4が、ライン・水平位置情報検出部2により検出されたライン・水平位置の圧縮伸張倍率を、圧縮伸張倍率テーブル3から読み出し、水平方向圧縮伸張部5が、圧縮伸張倍率読み出し部4により読み出された圧縮伸張倍率を用いてバッファメモリ1から読み出された画像データを水平方向に圧縮伸張する。
(もっと読む)
画像処理装置、画像処理方法および撮像装置
【課題】複数枚の撮像画像に対して所定の処理を施して1枚の処理結果画像を得る場合において、撮像光学系により画像に発生する歪みを効率よく補正できる。
【解決手段】処理出力画像生成手段で、複数枚の撮像画像の内の1枚を基準画像として前記複数枚の画像を用いた処理を行い、1枚の処理出力画像を生成する。この処理出力画像生成手段で生成された処理出力画像に対して、撮像レンズを含む撮像光学系により撮像画像に生じる画像歪みを、補正手段で補正する。
(もっと読む)
カメラ中の魚眼レンズからの画像の修正のための方法と装置
ビデオシステムを動作させる方法は、魚眼レンズの使用によって捕捉された画像を受け取ることを含む。画像は、複数の水平画像ラインに分割される。水平画像ラインの各々のそれぞれの断片は、異なるそれぞれのサンプリング周波数でサンプリングされる。各サンプリング周波数は、サンプリングされた断片のサイズの逆数に関連する。サンプリングされた断片のサイズは、画像の一番上から画像の一番下までの進行において各水平画像ライン毎に増加する。  (もっと読む)
(もっと読む)
画像データ変換装置
【課題】カメラ光軸を傾けず水平にして撮像した入力画像についても、真正面と左右面の歪を少なくすることに加えて、下方の面も広い範囲で歪少なく再現した出力画像を得る。
【解決手段】入力画像の信号から球形歪を除去するように画像変換して出力画像を得る画像変換部の画像変換モデルは、円形の平面からなる平面直交座標系の前記入力画像を、魚眼レンズと対応して被写体が映し出される極座標系の半球状の仮想物体面の画像に変換し、該仮想物体面の画像を、球形歪を補正する3次元直交座標系の補正面3上の画像に変換し、該補正面3の画像を、平面直交座標系の表示面に正射影法により投影して出力画像を得る。
(もっと読む)
画像データ変換装置
【課題】カメラの光軸を傾けて撮像した画像を入力画像とする場合において、広い範囲に亘って歪の少ない正常な出力画像を得る。
【解決手段】画像変換部の仮想的な画像変換モデルは、円形の平面からなる平面直交座標系の入力画像1を、魚眼レンズ81と対応して前記被写体が映し出される極座標系の半球状の仮想物体面2の画像に変換し、該仮想物体面2の画像を、球形歪を補正する3次元直交座標系の補正面3,3A上の画像に変換し、補正面3,3Aの画像を、平面直交座標系の表示面4に正射影法により投影して出力画像を得る。補正面3,3Aの3次元直交座標をx1,y1,z1とするとき、
として、該x1’,y1’,z1’に基づき、補正面3,3Aにおいて、入力画像をθだけy−z面内で回転して、出力画像に変換されるようにする。
(もっと読む)
ディストーション補正装置
【課題】ディストーション補正および画像圧縮を有する処理系において、全体的な処理時間の短縮を図る。
【解決手段】補正処理部3は、画像データに対して、所定の処理順序でディストーション補正を順次行うとともに、補正された画像データを後段バッファ4に順次書き込む。圧縮処理部5は、後段バッファ4から画像データを順次読み出すとともに、読み出された画像データに対するデータ圧縮を、補正処理部3の処理と並行し、かつ、補正処理部3の処理順序と順序的に対応した処理順序で順次行う。アクセス制御部6は、後段バッファ4に保持しておく必要があるデータを管理することによって、補正処理部3によるデータ書き込みと、圧縮処理部5によるデータ読み出しとを制御する。
(もっと読む)
画像処理装置、撮像装置、プログラムおよび画像処理方法
【課題】 軸上色収差や像面湾曲収差などの収差補正を行う手段を提供する。
【解決手段】 画像処理装置は、画像読込部と、補正画像生成部とを備える。画像読込部は、撮影レンズの焦点距離、撮影距離、撮影レンズのレンズ配置の少なくとも1つのパラメータを変化させてそれぞれ撮像された複数の撮像画像を取得する。補正画像生成部は、各々の撮像画像からそれぞれ画像情報を取得するとともに、複数の画像情報を組み合わせて、撮影レンズの収差が補正された補正画像を生成する。
(もっと読む)
デジタルプロジェクターをデジタルカメラに対し較正する方法
【課題】反射屈折型プロジェクター、さらには複数のプロジェクターを必要とするものに
対し、単一のプロジェクターを用いた全方向映写システムを提供すること。
【解決手段】前記プロジェクター・ピクセルのアレーを前記センサーピクセルのアレーに
相関させる光輸送行列を得るステップと、光輸送行列からぶれカーネルを生成するステッ
プと、入力画像を該光輸送行列の逆行列で掛けて中間変換画像を作成するステップと、該
ぶれカーネルを用いて前記中間変換画像に逆重畳を適用し最終画像を作成するステップと
、該最終画像を投影するために前記デジタルプロジェクターに提出するステップとを実施
するステップとを有する。
(もっと読む)
広角光学系及びそれを用いた撮像装置
【課題】 広いエリアを撮像可能であり、近接した被写体に対しても十分に補正された像を形成することができる広角光学系を提供すること。
【解決手段】 物体側より順に、開口絞りと、正の屈折力を有する第1レンズと、負の屈折力を有する第2レンズと、第3レンズとにより構成されており、前記第3レンズは、両面が、光軸近傍では物体側に凸面を向けた形状となりレンズ外周部近傍では物体側に凹面を向けた形状となるように、光軸からの距離に従って屈折力を変化させた非球面であり、以下の条件式(1)、(2)を満足する。
0.1 < d5/d6 < 0.65 ・・・(1)
−0.04 < f/f3 < 0.04 ・・・(2)
但し、d5は前記第2レンズと第3レンズとの光軸上の空間距離、d6は前記第3レンズの光軸上の厚さ、fは広角光学系全系の焦点距離、f3は前記第3レンズの焦点距離である。
(もっと読む)
61 - 80 / 205
[ Back to top ]