
Fターム[5C122EA33]の内容
Fターム[5C122EA33]に分類される特許
1 - 20 / 205
車載カメラシステム及びその較正方法、及びその較正プログラム
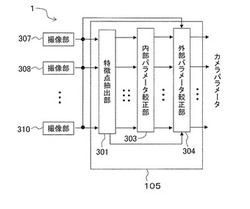
【課題】撮像部の 内部パラメータと外部パラメータを容易に較正できる車載カメラシステムの較正方法を得ること。
【解決手段】車載カメラシステム1の較正方法は、撮像部307〜310により撮像された画像から予め設定された直線部分を有する認識対象物を認識し、画像から認識対象物の特徴点を抽出し、その特徴点を仮想球面に投影して仮想球面601に形成された特徴点列の形状に基づいて撮像部307〜310の内部パラメータを推定し、推定した内部パラメータを較正するとともに、特徴点に基づいて画像の俯瞰視点を算出し、その算出した俯瞰視点に基づいて撮像部307〜310の外部パラメータを推定し、その推定した外部パラメータを較正することを特徴としている。
(もっと読む)
カメラキャリブレーション装置、乗員支援装置、カメラキャリブレーション用歪み係数生成方法

【課題】広角レンズの歪みを、容量の小さなメモリで高精度に補正するカメラキャリブレーション装置を提供すること。
【解決手段】カメラ50と歪み校正用被写体の相対位置情報から歪みのない理想結像位置を算出する理想結像位置算出手段12と、校正用被写体が撮影された画像からレンズの歪みを含んだ実測結像位置を検出する実測結像位置検出手段11と、結像位置に応じた重みを生成するための重み関数を決定する重み関数決定手段14と、歪み係数を用いて算出される歪み量が含まれる理想結像位置と実測結像位置、及び、結像位置に応じて前記重み関数が生成した重みを、歪み係数の評価関数に入力して、評価関数の演算結果から歪み係数を決定する歪み係数決定手段13と、を有することを特徴とするカメラキャリブレーション装置を提供する。
(もっと読む)
画像処理装置、画像処理方法、及び画像処理プログラム
【課題】歪円形画像に撮像される撮像対象の把握性を向上させることができる画像処理装置、画像処理方法及び画像処理プログラム等を提供する。
【解決手段】魚眼画像を魚眼画像用モニタ2に表示可能な魚眼画像データに変換し、所定の位置を基準とした所定の範囲内の魚眼画像を、平面正則画像用モニタ3に二次元的に視認可能に表示する平面正則画像データに歪補正し、魚眼画像データ又は、平面正則画像データを、選択的に出力する。
(もっと読む)
撮像装置及びプログラム
【課題】撮影した被写体画像に人物が含まれるか否かに係らず、被写体画像に歪みが少なく違和感の無い自然な画像を取得する。
【解決手段】撮像装置100が、被写体を撮像する電子撮像部2等と、電子撮像部2によって撮像された被写体画像の歪み補正処理を行う歪曲収差補正部7aと、電子撮像部2によって撮像された被写体画像の中の顔領域を認識する顔領域認識部6aと、顔領域認識部6aによって認識された顔領域の被写体画面内での位置を検出する顔領域位置検出部6bと、顔領域位置検出部6bによって検出された位置に基づいて、歪曲収差補正部7aによる歪み補正の度合を判定する判定部11bと、を備える。
(もっと読む)
撮像監視画面及び全方位撮像画面監視システム
【課題】全方位撮像画面の撮像エリアの外周での映像の分解能が粗い場合でも、鮮明な画像を得られる撮像監視画面及び全方位撮像画面監視システムを提供する。
【解決手段】全方位撮像画面監視システムSは、全方位を動画として撮像可能な固定された第1の撮像手段10と、動画として撮像可能な固定された第2の撮像手段20と、第1の撮像手段10と第2の撮像手段20で撮像した動画を録画する記録手段30と、記録手段30を制御する制御手段40と、第1の撮像手段10、第2の撮像手段20、記録手段30からの撮像を表示する表示手段50と、を備え、第2の撮像手段20は、第1の撮像手段10の撮像領域の外周を撮像する位置に配置されたものである。
(もっと読む)
画像処理方法、画像処理装置、撮像装置、および、画像処理プログラム
【課題】画像回復処理に必要な情報量を低減しつつ、高精度な画像回復処理を実行可能な画像処理方法を提供する。
【解決手段】撮影画像の画像回復処理を行う画像処理方法であって、撮影画像の撮影条件に応じた係数データを用いて、撮影画像の位置に応じた複数の撮像光学系の第1の光学伝達関数を生成する工程と、第1の光学伝達関数を撮影画像の中心または撮像光学系の光軸の周りに回転させて複数の第2の光学伝達関数を生成する工程と、第1の光学伝達関数および前記第2の光学伝達関数に基づいて画像回復フィルタを生成する工程と、画像回復フィルタを用いて撮影画像の画像回復処理を行う工程とを有する。
(もっと読む)
動画提示装置
【課題】歪曲広角画像上で任意の追跡対象物を自動追跡する。
【解決手段】魚眼撮影した歪曲広角画像Sを、メモリ130内にフレーム単位で入力する。変換部150は、格納部170内の切出条件に基づき、歪曲画像Sの点Pの位置から、φで示される向きに、サイズmの画像を切り出し、正則画像Tに変換してメモリ140に格納する。追跡開始点Qを含む追跡開始指示が与えられると、フラグ設定部220はフラグをONにし、点Qが新たな点Pになるよう更新する。基準色抽出部200は、新たな点Pの近傍色を基準色αとして抽出し、基準色格納部190に格納する。近隣ブロック抽出部160は、点Pの近傍ブロックを抽出し、ブロック選択部180は、基準色αに近似する画素数が最大となるブロックを選択する。自動変更部210は、選択ブロック内の基準色αに最も適合する色をもつ候補領域の中心点を新たな点Pとする更新を行う。
(もっと読む)
端末装置、撮像方法およびプログラム
【課題】撮像した画像に対し、状況に応じた適切な補正を行って出力することのできる端末装置、撮像方法およびプログラムを提供する。
【解決手段】カメラで撮像した画像を取得し(S10)、顔、ホワイトボード、特定対象物の検出を行う(S12)。また、顔、ホワイトボード、特定対象物の順に高い優先順位を設定する。ホワイトボードの状態に変化があれば(S26:YES)、ホワイトボードの優先順位を高順位に設定する(S28)。特定対象物がズームされたら(S30:YES)、特定対象物の優先順位を高順位に設定する(S32)。優先順位が最上位の対象物に応じた補正方法を決定し、その補正方法で画像の補正を行い(S34)、他の拠点に送信する(S36)。
(もっと読む)
画像変形方法及び画像変形装置
【課題】画像の変形処理において、入力画像バッファのサイズを小さくする。
【解決手段】画像変形方法は、変形前画像の走査線方向に第1ピッチで、且つ垂直走査方向に第2ピッチで配置された領域隅点によって囲まれた複数の領域を設定する工程と、複数の領域の各々に対して0個以上のサンプリングポイントを設定する工程と、サンプリングポイントの個数と、各サンプリングポイントを特定する識別子と、変形後画像において各サンプリングポイントに対応する画素とを対応づける変形データを生成する工程と、変形前画像の画像データを読み込んで入力バッファに格納する工程と、変形データに基づいて画像データを変更することにより変形後画像を生成する工程とを備える。
(もっと読む)
広角歪補正処理を有する画像処理方法、画像処理装置及び撮像装置
【課題】比較的小規模な回路で、歪み補正処理に関して被写体の正確な認識を図る。
【解決手段】歪み補正係数には、少なくとも、光学系110のレンズの物理的特性及び前記光学系への設定された仮想投影面VPからの入射光の入射角に基づいて算出された第1歪み補正係数と、前記光学系への入射角の正接関数を変数として算出される撮像素子と前記光学系の光軸とが交わる光学中心からの像高である第2歪み補正係数が含まれており、第2歪み補正係数が所定の値以上となる最小入射角がある場合、前記最小入射角より大きな入射角に対応する領域を避けるように前記仮想投影面を変更する。
(もっと読む)
広角歪補正処理を有する画像処理方法、画像処理装置及び撮像装置
【課題】比較的小規模な回路で、歪み補正処理に関して被写体の正確な認識を図る。
【解決手段】歪み補正係数には、少なくとも、光学系110のレンズの物理的特性及び前記光学系への設定された仮想投影面VPからの入射光の入射角に基づいて算出された第1歪み補正係数と、前記光学系への入射角の正接関数を変数として算出される撮像素子と前記光学系の光軸とが交わる光学中心からの像高である第2歪み補正係数が含まれており、歪み補正係数の値が所定の上限値を超えることで飽和する入射角の領域で算出される画像データを予め定められた所定の値に変換する。
(もっと読む)
広角歪補正処理を有する画像処理方法、画像処理装置及び撮像装置
【課題】比較的小規模な回路で、歪み補正処理に関して被写体の正確な認識を図る。
【解決手段】歪み補正係数には、少なくとも、光学系110のレンズの物理的特性及び前記光学系への設定された仮想投影面VPからの入射光の入射角に基づいて算出された第1歪み補正係数と、前記光学系への入射角の正接関数を変数として算出される撮像素子と前記光学系の光軸とが交わる光学中心からの像高である第2歪み補正係数が含まれており、歪み補正係数の値が所定の上限値を超えることで飽和する入射角の領域を避けるように前記入射角に1未満の所定係数を乗じて前記正接関数を算出する、
(もっと読む)
車両視覚システムの較正方法および車両視覚システム
【課題】車両視覚システムを提供すること。
【解決手段】車両視覚システムは、非線形ひずみのある画像をその各々が取得する複数の画像センサ(11〜14)を備えている。車両視覚システムを較正するために、画像センサ(11)を用いて複数の物体の画像(22)を取得し、さらに、追加の画像センサ(13)を用いても複数の物体の画像(22)を取得する。画像センサ(11)と追加の画像センサ(13)は、重複する視野(15,17)を有する。複数の物体(20)に対する、画像センサ(11)の位置および配向は、取得された画像に基づいて判定される。複数の物体(22)に対する追加の画像センサ(13)の位置および配向は、追加の取得された画像に基づいて判定される。追加の画像センサ(13)と画像センサ(11)との相対位置および配向は、これらの判定結果に基づいて確立される。
(もっと読む)
撮像装置、ぶれ補正方法、制御プログラム、及び制御プログラムを記録する記録媒体
【課題】ぶれ補正時の歪曲収差補正を適切に行うことを可能とする撮像装置、ぶれ補正方法、制御プログラム、及び制御プログラムを記録する記録媒体を提供する。
【解決手段】被写体像を光電変換する撮像部9を駆動して駆動後の位置情報を生成する被ぶれ補正機構7を有する撮像装置1において、光電変換された被写体像を1ライン毎に取得し、取得した被写体像のラインに対応する1ラインまたは複数ラインの位置情報を抽出する。そして、1ラインまたは複数ラインに対応する位置情報に基づいて、被写体像に対して歪曲収差補正する。
(もっと読む)
撮像装置及び撮像方法
【課題】 第1の処理領域では、第2の処理領域に対して相対的な拡大処理を行いつつ、撮像した画像に比べて解像度の低下を抑止する撮像装置及び撮像方法等を提供すること。
【解決手段】 撮像装置は、撮像光学系により結像される被写体像から画像信号を生成する複数の画素を有する撮像素子240と、複数の画素分の画像信号からなる原画像に対して変倍処理を施す変倍処理部340と、変倍処理後の画像を変倍画像として出力する出力部350と、を含み、変倍処理部340は変倍画像上の注目画素の位置に応じて異なる変倍率で変倍処理を行い、撮像素子240は、複数の画素として、変倍画像の画素数よりも多い画素を有する。
(もっと読む)
画像処理装置と画像処理方法およびプログラム
【課題】撮像装置からの距離が一定でないことによって生じる画像歪みが補正された広画角のパノラマ画像を容易に生成できるようにする。
【解決手段】合成処理部29は、複数枚の撮像画像から画像の切り出しを行い、切り出した画像を繋ぎ合わせてパノラマ画像を生成する。加工処理部30は、被写体までの距離を該被写体における複数位置で計測して得た距離情報に基づいてパノラマ画像の縮小または拡大を行い、被写体までの距離の違いによって生じたパノラマ画像における被写体の画像歪みを補正する。撮像装置からの距離が一定でないことによって生じる画像歪みが補正された広画角のパノラマ画像を容易に生成できる。
(もっと読む)
カメラ、画像変換装置、及び画像変換方法
【課題】広角レンズを用いて撮像された歪曲画像から、従来に比してより自然でより見易い表示画像を得ること。
【解決手段】撮像部101は、広角レンズ102を用いて撮像画像を得る。空間モデル格納部111には、撮像空間に存在する、床、天井、壁、テーブル等がモデル(テンプレート)化された空間モデルが格納されている。投影変換部109は、撮像画像を空間モデルに投影するようにマッピングする。平面変換部112は、空間モデルにマッピングされた画像を用いて、ディスプレイ画像を得る。
(もっと読む)
カメラシステム
【課題】魚眼レンズ使用に伴う画像歪みを補正し動画像を効率良く圧縮すること。
【解決手段】カメラ装置2は、魚眼レンズを使用するレンズ部21と、魚眼レンズで撮影した歪曲収差のある画像を歪曲収差が小さくなるように歪補正処理を行う歪補正部24と、歪補正部24から出力された画像を圧縮符号化するエンコード部25を備える。表示装置4は、カメラ装置2のエンコード部25で圧縮符号化された画像を伸長復号化するデコード部42と、デコード部42から出力された画像を表示する表示部43を備える。
(もっと読む)
表示装置及びコンピュータプログラム
【課題】 直感的なユーザインターフェースにより、簡単な操作で、全方位画像と歪み補正画像との表示の切替えを行なうことができる表示装置を提供する。
【解決手段】 表示装置としてのビューワ端末1は、全方位画像を取得する全方位画像取得部16と、パネルインターフェース11を備えた画像表示部19と、全方位画像の一部又は全部について歪み補正をして歪み補正画像を生成する歪み補正画像生成部15と、画像表示部19に全方位画像又は歪み補正画像が表示されているときに、パネルインターフェース11を用いて、表示されている画像に対して直接行われた、全方位画像の表示と歪み補正画像の表示との間の切替えのための操作を検出する操作検出部12と、画像表示部19に全方位画像又は歪み補正画像を表示させるとともに、操作検出部12にて検出された操作に従って、全方位画像の表示と歪み補正画像の表示との間の切替えを行なう画像補正シーケンサ13とを備えている。
(もっと読む)
撮像装置、その制御方法及びプログラム
【課題】動きベクトルを検出する際の探索領域を適切に設定し、動きベクトルの検出効率を上げる。
【解決手段】画像補正部210は、レンズ部の歪曲収差特性に応じて、撮像部により第1の時点に生成された画像データに対応する参照画像データと、撮像部により前記第1の時点より後の第2の時点に生成された画像データとの歪曲収差を補正する。動き検出部A203は、歪曲収差が補正された参照画像データと画像データとに基づいて、動きベクトルを検出する。ベクトル補正部204は、レンズ部の歪曲収差特性に応じて、動きの検出部A203により検出された動きベクトルについて、各画像の歪曲収差補正により生じた誤差成分を補正する。動き検出部B205は、補正された動きベクトルに基づいて動きベクトルの探索範囲を設定し、当該探索範囲で動きベクトルを検出する。
(もっと読む)
1 - 20 / 205
[ Back to top ]