
Fターム[5C122EA41]の内容
Fターム[5C122EA41]に分類される特許
201 - 220 / 3,338
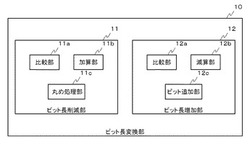
浮動小数点数のビット長変換回路およびそれを用いた振動補正制御回路
【課題】既存資産との互換性を保ちつつ、アプリケーションに見合う回路規模を実現する。
【解決手段】ビット長削減部11は、浮動小数点数で表現された演算対象値のビット長を削減して演算部15に出力する。ビット長増加部12は、演算部15から入力される浮動小数点数で表現された演算結果値のビット長を増加させて、元のビット長に戻す。ビット長削減部11は、浮動小数点数の指数部の上位側ビットを設定された数、破棄しつつ演算部15により実行されるアプリケーションに応じて、上位側ビットが破棄される指数部に正または負のオフセット値を加算する。ビット長増加部12は、浮動小数点数の指数部からビット長削減部11により破棄されたビットを復元しつつオフセット値を減算する。
(もっと読む)
像ブレ補正装置および撮像装置

【課題】単純な構成で装置の大型化を伴わずに、撮像素子を回動させる際、回動中心の変位による像ブレを抑えること。
【解決手段】像ブレ補正装置は、装置に加わる振れを検出し、撮像素子を、その撮像面と直交する軸を中心に回動させる機構により像ブレを補正する。撮像素子を保持する回動部材3は、ベース部材5によって回動可能に保持される。回動部材3とベース部材5は、引っ張りばねによって互いに近づく方向に付勢されており、回動部材3とベース部材5の間に設けられるボール7は両者に当接した状態で回動部材3を回動可能に支持する。ボール7はベース部材5に形成したボール受け溝51内に配置される。回動部材3に設けた当接面3hは、撮像素子の撮像面と直交する軸上に頂点を有する円錐側面の一部をなしており、引っ張りばねの付勢力によってボール7と当接する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】動画像を再生する場合における高画質化を図ることが可能な、画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】フレーム画像からなる動画像を示す画像信号に基づいて、動画像を撮像した撮像装置の動きを示すカメラワークを検出する検出部と、検出されたカメラワークからぶれ成分を除いた第1補正カメラワークを算出する第1算出部と、画像信号と第1補正カメラワークとに基づいて、第1補正カメラワークに対応する補正フレーム画像を生成する生成部と、補正フレーム画像内に画像が存在しない補間領域が含まれる場合に、補間領域を補間する補間部とを備える画像処理装置が提供される。
(もっと読む)
ズームレンズ系、撮像装置及びカメラ
【課題】高解像度を有し、小型でありながら広角端での画角が70°程度以上で広角撮影に充分に適応でき、3倍程度以上と比較的大きなズーム比を有するズームレンズ系、該ズームレンズ系を含む撮像装置、及び該撮像装置を備えたコンパクトなカメラを提供する。
【解決手段】少なくとも1枚のレンズ素子で構成されたレンズ群を複数有し、物体側から像側へと順に、負のパワーを有する第1レンズ群と、正のパワーを有する第2レンズ群と、負のパワーを有する第3レンズ群と、少なくとも第4レンズ群を含む後続レンズ群とからなり、撮像時の広角端から望遠端へのズーミングの際に、各レンズ群の間隔が変化し、前記第4レンズ群が像面に対して固定され、以下の条件:vd4G<40及びωW>34(vd4G:第4レンズ群を構成するレンズ素子のd線に対するアッベ数、ωW:広角端における半画角)を満足するズームレンズ系、撮像装置及びカメラ。
(もっと読む)
像振れ補正装置
【課題】可動部材を駆動するアクチュエータの駆動効率の向上、及び駆動負荷の軽減を可能にすることができると共に、可動部材の位置決め精度を向上させることができる像振れ補正装置を提供する。
【解決手段】像振れ補正装置は、固定地板101に対してY方向へ移動可能に支持される移動部材102と、移動部材102をY方向へ駆動するアクチュエータ103と、固定地板101に対してP方向へ移動可能に支持される移動部材105と、移動部材105をP方向へ駆動するアクチュエータ106と、像振れを補正する補正レンズ108を有し、移動部材102とともにY方向に移動するとともに、移動部材105とともにP方向に移動する可動部材110とを備える。可動部材110は、移動部材105とともにP方向に移動する際に、移動部材102に対してボール111の転動支持によりP方向に移動し、移動部材102とともにY方向に移動する際に、移動部材105に対してボール112の転動支持によりY方向に移動する。
(もっと読む)
撮像装置、ぶれ補正方法、制御プログラム、及び制御プログラムを記録する記録媒体
【課題】撮像装置の回転成分方向の動きを考慮した最適なぶれ補正が可能な撮像装置、像振れ補正方法、及びプログラム及びプログラムを記録する記録媒体を提供する。
【解決手段】時間的に連続するフレームを処理する撮像装置1において、ベクトル算出処理においては、それぞれのフレームに対して、フレームを所定の画素数からなる小領域に分割した各ブロックについて、動きベクトルを算出する。設定処理においては、フレームごとの回転抽出結果に基づいて、動きベクトルの回転成分を除去後、ベクトル算出領域のグループ化を行う。決定処理においては、グループ化されたグループ領域の中から、被写体のない背景のグループ領域を決定する。
(もっと読む)
視軸角制御装置および視軸角制御方法
【課題】視軸角の制御を高速に精度良く行うことを課題とする。
【解決手段】視軸角制御装置10は、撮像装置の視軸角の実測値と該視軸角の実測値に対応するウェッジプリズムのプリズム回転角の実測値とから求められた2元多項近似式を用いて、視軸角を補正する。そして、視軸角制御装置10は、補正された視軸角に対して、近軸領域でのスネルの式を用いて、ウェッジプリズムのプリズム回転角を算出する。続いて、視軸角制御装置10は、算出されたプリズム回転角に応じて、ウェッジプリズムの回転制御を行う。
(もっと読む)
撮像装置、及びその制御方法、プログラム
【課題】ローリングシャッタ問題による歪みを補正する場合の補正残り、あるいは過補正を低減する。
【解決手段】ローリングシャッタ方式で駆動する撮像素子を用いて画像を撮像する場合に、当該撮像素子の露光期間における撮像装置の振動を検出し、検出された振動の時間特性を取得する。振動の時間特性について、振動に起因して画像に生じる被写体像の歪み量の周波数分布を解析し、当該周波数分布から歪み量が極大となる周波数を、歪み量の中心周波数として決定する。そして少なくとも中心周波数について、振動の時間特性を取得した際に生じた位相ズレがなくなるように、振動の時間特性を補償し、補償後の振動の時間特性から算出された補正量を用いて、撮像素子のラインごとに振動に起因して生じた被写体像の歪みを補正する。
(もっと読む)
撮像素子の駆動機構
【課題】撮像素子に振動や不測の傾斜が生じることを防止できる撮像素子の駆動機構を提供する。
【解決手段】撮像面101を有する撮像素子1を撮像面101に対して直角な方向に駆動する撮像素子の駆動機構であって、撮像素子1が設けられる被動リンク5cと回転対偶6a,6bを介して撮像素子1が設けられる被動リンク5cに回転可能に連結される二組の駆動リンク5a,5bとを備える第一の平面三節リンク機構60と、二組の駆動リンク5a,5bのそれぞれに回転対偶4a,4bを介して連結されており二組の駆動リンク5a,5bのそれぞれを撮像素子1の撮像面101に平行な方向に駆動できる二組の駆動部3a,3bと、撮像素子1を撮像面101に対して直角な方向に駆動されるように案内する案内機構10a,10bとを備える。
(もっと読む)
監視カメラ
【課題】監視用カメラにおける画像ブレ補正装置の故障の発生確率を小さくさせることを目的とする。
【解決手段】監視カメラは、監視カメラの振れを検出する振れ検知装置と、振れによる画像ブレを補正する第1補正レンズ16を有する第1防振装置21及び第2補正レンズを有する第2防振装置22と、それらを制御する制御装置とを備える。第1防振装置21は常時作動され、第1水平アクチュェータ23と第1垂直アクチュェータ24とによって駆動される。第2防振装置22は第1防振装置21が故障した際に代わって作動される予備の防振装置であり、第2水平アクチュェータ25と第2垂直アクチュェータ26とによって駆動される。第1防振装置21には第1水平位置センサ27と第1垂直位置センサ28とが設けられ、同様に第2防振装置22にも水平位置センサと垂直位置センサが設けられる。
(もっと読む)
フレキシブル配線構造、及び撮像装置
【課題】フレキシブル配線の反力を抑えることができ、フレキシブル配線の取り回しによる小型化を図ることができるフレキシブル配線構造及び撮像装置を提供する。
【解決手段】第1のフレキシブル配線部11及び第2のフレキシブル配線部12と中継部13を備え、中継部13から立上した第1の立上面11aと、第1の立上面11aから第1の屈曲部11dにおいて屈曲した第1の屈曲後立上面11bと、第2の中継側曲げ部12cを介し中継部13の平面から立上した第2の立上面12aと、第2の立上面12aからL字形状部の屈曲部であり第1の屈曲部11dよりも上方の第2の屈曲部12dにおいて屈曲した、第1の屈曲後立上面11bと平行な第2の屈曲後立上面12bと、を有し、第2の屈曲後立上面12bは、第2の立上面12aに設けられた立上面曲げ部12eで折り返されて第1の屈曲後立上面11bに重なる。
(もっと読む)
撮像装置、及びその制御方法、プログラム
【課題】ローリングシャッタ問題による歪みを補正する場合の補正残り、あるいは過補正を低減する。
【解決手段】ローリングシャッタ方式で駆動する撮像素子を用いて画像を撮像する場合に、当該撮像素子の露光期間における撮像装置の振動を検出し、検出された振動の時間特性を取得する。振動の時間特性を、振動の周波数について複数の帯域に分離し、振動に起因して画像に生じる被写体像の歪み量の周波数特性を、各帯域について算出し、当該歪み量の周波数特性が極大となる帯域を、歪み量の中心周波数が含まれる帯域として決定する。そして、少なくとも中心周波数が含まれる帯域の1つの周波数について、振動の時間特性を取得する際に生じた位相ズレがなくなるように振動の時間特性を補償する。さらに補償後の振動の時間特性から算出された補正量を用いて、撮像素子のラインごとに振動に起因して生じた被写体像の歪みを補正する。
(もっと読む)
撮像装置、撮像方法、及び撮像プログラム
【課題】最適な電子手ぶれ補正画像を取得する。
【解決手段】撮像装置において、撮像素子により連続した複数の撮影画像を取得する画像取得制御手段と、前記画像取得制御手段により得られた複数の撮影画像の画像サイズを、前記複数の撮影画像のうち、少なくとも1つの撮影画像に対する撮影情報に基づいて設定された画像サイズに変更する画像サイズ変更手段と、前記画像サイズ変更手段により得られたサイズ変更画像に基づいて各撮影画像同士の動きベクトルを検出する動きベクトル検出手段と、前記動きベクトル検出手段により検出された動きベクトル情報に基づいて前記サイズ変更画像を補正し、補正された複数の前記サイズ変更画像を合成する合成手段とを有することにより、上記課題を解決する。
(もっと読む)
振動補正制御回路
【課題】手振れなどの振動による光軸のずれを光学的に補正する方式において、その補正精度を高める。
【解決手段】振動成分信号生成部30は、撮像装置500の振動を検出する振動検出素子60の出力信号に応じて撮像装置500の移動量を示す振動成分信号を生成する。駆動信号生成部40は、駆動されるレンズ70の位置を検出する位置検出素子80の出力信号および振動成分信号に基づいて、レンズ70の位置を補正すべく駆動素子90を制御するための駆動信号を生成する。リミット回路38は、振動成分信号にレンズ70の楕円状の可動範囲に対応するリミットを設定する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】多眼方式の撮像装置で取得された画像群から、ぶれを含まない画像を提供することを目的とする。
【解決手段】画像処理装置が、シャッタースピードが異なる複数の撮像部を有する多眼方式の撮像装置によって撮影された複数の画像を取得する画像取得部と、前記取得した複数の画像から、前記複数の撮像部において画角が重複する重複領域を算出する重複領域算出部と、前記重複領域算出部で算出された重複領域に対応する前記複数の画像の領域画像を用いて、ぶれを含む画像を検出するぶれ画像検出部と、を備えたことを特徴とする。
(もっと読む)
光学機器又は撮像装置並びに光学機器の制御方法
【課題】 平行振れの高精度な補正を行う防振制御装置を提供する。
【解決手段】 振れの角速度を検出する第1振れ検出手段4807pと、第1振れ検出手段とは異なる方式で振れを検出する第2振れ検出手段101pと、第1振れ検出手段の出力に基づく第1信号と第2振れ検出手段の出力も基づく第2信号とから補正値を演算する演算手段308と、補正値を用いて第1振れ検出手段からの出力を補正する出力補正手段309と、第1振れ検出手段の出力に基づいて振れ補正駆動手段4809により振れ補正手段4806を駆動させる第1防振制御手段と301,303と、出力補正手段で補正された第1振れ検出手段の出力に基づいて振れ補正駆動手段により振れ補正手段を駆動させる第2防振制御手段310,311,309と、第2防振制御手段の周波数特性を第1防振制御手段の周波数特性とは異ならせる周波数帯域変更手段311とを有する。
(もっと読む)
複合高域遮断フィルタ、およびそれを用いた撮像装置
【課題】手振れ補正光学系を有する撮像装置において、手振れ補正部材による手振れ補正帯域の高周波側での位相遅れによる影響を排除し、手振れ角の検出精度を向上し、手振れ補正性能を向上する。
【解決手段】撮像装置において、複合高域遮断フィルタ105は、第一の高域遮断フィルタ105aと、第二の高域遮断フィルタ105bと、加減算器108とを備える。第二の高域遮断フィルタ105bは、第一の高域遮断フィルタ105aの出力を入力とする。加減算器108は、複合高域遮断フィルタ105の入力から、第二の高域遮断フィルタ105bの出力を減算し、その減算結果を第一の高域遮断フィルタ105aに出力する。第一の高域遮断フィルタ105aの出力が、複合高域遮断フィルタ105の出力として出力される。
(もっと読む)
撮像装置
【課題】カメラを振っていないにもかかわらず、検出された振れ信号により誤補正され、撮影画像が揺れて見えてしまうのを防止する。
【解決手段】撮像光学系の光軸に垂直な方向に移動することにより、被写体像のぶれを補正する補正ユニットと、撮像光学系によって結像される被写体像を撮像する撮像素子と、撮像装置の振れを検出する振れ検出部と、振れ補正時には、振れ検出部で検出した振れに基づいて、被写体像のぶれを補正するように補正ユニットを駆動する駆動部と、撮像装置の少なくとも光軸方向の速度を検出する速度検出部と、速度検出部によって所定速度以上の速度が検出されたとき、振れ検出部で検出された撮像装置の振れに対する駆動部による補正ユニットのヨーイング方向の駆動の応答性が振れ補正時の応答性に比べて小さくなるように駆動部を制御する駆動制御部とを備える。
(もっと読む)
手振れ補正装置及び撮像装置
【課題】簡素な構成で安定して手振れ補正のための制御を行う。
【解決手段】本発明に係る手振れ補正装置は、磁気コイルを有し、手振れ補正のための補正レンズ124を磁力により駆動する駆動コイル110と、移動部材の位置を検出するホール素子130と、磁気コイルを有し、ホール素子130を間に介在させて駆動コイル110と対向配置される補正コイル140と、駆動コイル110の駆動信号に所定値以上の周波数成分が含まれている場合に補正コイル140を駆動する補正回路320と、を備える。
(もっと読む)
撮像装置、及び、移動制御プログラム
【課題】動画の撮影において手ブレ補正に係るセンタリングを適切に行うことができる撮像装置、撮像方法、及び、そのプログラムを提供する。
【解決手段】デジタルカメラ1は、撮像した動画像をフレーム間予測方式で符号化処理して記録する。CCDベース19は、CCD11を所定の可動範囲内で駆動させる。姿勢センサ22は、動画像のブレ要因となるデジタルカメラ1の動きを検出する。手ブレ補正制御部21は、姿勢センサ22が検出した動きに基づいてCCD11の移動量と移動方向を導出する。CCD11の位置とその可動範囲と当該移動量及び移動方向に基づいて当該移動量による移動が可能であるか否かを判別する。移動可能である場合には、CCD11を当該移動量により移動させる。移動不可能である場合には、フレーム間予測方式による圧縮後に予測フレームとなる撮像画像を撮影するタイミングにCCD11を可動範囲の中心位置に移動させる。
(もっと読む)
201 - 220 / 3,338
[ Back to top ]