
Fターム[5F031MA01]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 処理装置 (13,378) | 複数の処理部を集積した装置(モジュール) (1,217)
Fターム[5F031MA01]の下位に属するFターム
Fターム[5F031MA01]に分類される特許
1 - 16 / 16
基板処理時間設定方法及び記憶媒体
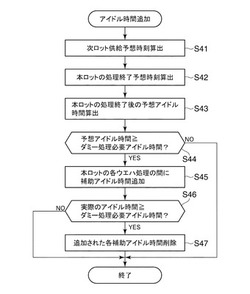
【課題】ダミー処理を極力廃止することができる基板処理時間設定方法を提供する。
【解決手段】他の基板処理装置11におけるプラズマ処理の終了予想時刻に基づいて、次ロットの当該基板処理装置11への供給予想時刻が算出され、本ロットの全てのウエハのプラズマ処理の終了予想時刻が算出され、次ロットの供給予想時刻及び本ロットのプラズマ処理の終了予想時刻に基づいて、本ロットの全てのウエハのプラズマ処理の終了後に続く予想アイドル時間が算出され、予想アイドル時間がダミー処理必要アイドル時間以上である場合、本ロットの未処理の各ウエハのプラズマ処理の間に補助アイドル時間が追加されて設定される。
(もっと読む)
基板搬送装置

【課題】搬送ロボットのθ軸が回転した時の角度誤差を検出することが可能であり、検出した角度誤差からθ軸の角度補正を行う機能を有する基板搬送装置を提供する。
【解決手段】アーム13を有し基板7を搬送する搬送ロボット2と、基板7を外部に搬送するための開口部8とを備える。搬送ロボット2は、θ軸モータによりアーム13を回転させ、R軸モータ110によりアーム13を伸縮させる。開口部8のフレームに、投光器から受光器へセンサ光を投射する検出センサ4、4’を備える。搬送ロボット2が、アーム13を伸縮して、開口部8を通して基板7を搬送する過程において、基板7が検出センサ4及び検出センサ4’のセンサ光を遮光し始めた時と、検出センサ4及び検出センサ4’がセンサ光の遮光が終了して再び受光し始めた時との、R軸モータ110の回転角度を用いて、θ軸モータの回転角度とアーム13の回転角度との差である角度誤差αを求める。
(もっと読む)
生産効率化装置、生産効率化方法、コンピュータプログラム
【課題】被処理体に対する処理効率を向上させることができる生産効率化装置を提供する。
【解決手段】被処理体を処理する複数の処理装置2との間で情報を通信する第1通信手段と、前記複数の処理装置2間で被処理体を搬送する搬送装置32を有する搬送システム3との間で、該搬送装置32の制御に関わる制御情報を通信する第2通信手段と、前記第1通信手段にて通信した情報に基づいて、該情報の通信先の処理装置2が処理済の被処理体に対する搬出および未処理の処理体の搬入を要する搬送時機を予測する手段と、該手段が予測した搬送時機に前記情報の通信先の処理装置2へ前記搬送装置32が到着するように前記搬送システムへの制御情報を生成する生成手段とを生産効率化装置1に備える。
(もっと読む)
シート貼付装置および貼付方法
【課題】被着体に対して所定の貼付位置に正確に接着シートを貼付することができるシート貼付装置および貼付方法を提供すること。
【解決手段】押圧手段4における支持体41の凹部43に接着シートSを受け入れることで、支持体41に対する接着シートSの位置ずれを防止することができるとともに、凹部43でウェハWを受け入れつつ接着シートSを貼付することで、ウェハWに対する接着シートSの位置ずれも防止することができ、ウェハWの所定の貼付位置に正確に接着シートSを貼付することができる。さらに、押圧手段4の支持体41で接着シートSを押圧しながらウェハWに貼付する際に、凹部43の外周面45で接着シートSの伸びを拘束することで、接着シートSがウェハWからはみ出すことなく所定形状を維持したまま貼付することができ、貼付精度を向上させることができる。
(もっと読む)
半導体被処理基板の真空処理システム及び半導体被処理基板の真空処理方法
【課題】真空搬送室に備えられた真空処理室の配置を最適化し、設置面積あたりの被処理物の生産能力の高い装置を提供する。
【解決手段】複数のカセット台の内の1つに設置されたカセット内に収納されたウエハが搬送される大気搬送室と、大気搬送室の後方に配置されたロック室と、ロック室の後方に連結された第一の真空搬送室と、第一の真空搬送室の後方に連結された搬送中間室と、搬送中間室の後方に連結された第二の真空搬送室と、第一の真空搬送室の後方に連結された少なくとも1つの真空処理室と、第二の真空搬送室の後方に連結された2つ以上の真空処理室とを備え、第一の真空搬送室に連結された真空処理室の数が第二の真空搬送室に連結された真空処理室の数よりも少なく構成するか、第一の真空搬送室に連結された真空処理室の使用を1つに制限するように構成した半導体被処理基板の真空処理システム及びそのシステムを用いた真空処理方法である。
(もっと読む)
フォトレジスト塗布現像装置、基板搬送方法、インターフェイス装置
【課題】フォトレジスト塗布現像装置から露光装置へロードロック装置を介して搬送する際に、ウエハ温度の変化を低減することができるフォトレジスト塗布現像装置を提供する。
【解決手段】開示されるフォトレジスト塗布現像装置1は、基板にフォトレジスト膜を形成するフォトレジスト膜形成部と、フォトレジスト膜形成部においてフォトレジスト膜が形成された基板を加熱する加熱処理部と、加熱処理部において加熱された、フォトレジスト膜が形成された基板を常温に冷却する冷却部と、冷却部において常温に冷却された基板を所定の温度に加熱する加熱部61と、フォトレジスト膜の露光のために、基板を減圧下で搬出するロードロック室L1,L2と、加熱部61からロードロック室L1へ基板を搬送する搬送部62とを備える。
(もっと読む)
搬送室
【課題】、組み立ての自由度が高く、メンテナンス作業等の容易化を図ることができる搬送室を提供すること。
【解決手段】少なくとも処理室が接続される複数の側壁を有する筐体51と、筐体51の上部開口を塞ぐ蓋部材52とを具備し、蓋部材52は、筐体51内の搬送装置をメンテナンスするための開口73が設けられた固定蓋71と、固定蓋71の開口73を開閉可能に設けられた開閉蓋72とを有し、開閉蓋72は、上面が平坦であるとともに、内部に空間77を有し、空間77内に、筐体51内部の検出動作を行うセンサー80が取り付けられてユニット化されている。
(もっと読む)
基板処理装置
【課題】基板間で処理品質を均一にすることができる基板処理装置を提供する。
【解決手段】塗布ブロックB1には複数の塗布処理ユニット(RESIST、BARC、TARC)が設けられている。各塗布処理ユニットは、塗布する処理液の種類ごとに異なる高さ位置で互いに略上下方向に並べて配置される。また、処理液の種類が同じ塗布処理ユニット同士は略水平方向に並べて配置されている。このため、基板に行う処理品質を、処理液の種類が同じ各塗布処理ユニット間で互いに精度よく均一にすることができる。
(もっと読む)
ワーク複合処理装置
【課題】ワークに対して種々の処理を行う各種の機構を効率よく配置できて、装置全体として小型化を図ることができるワーク複合処理装置を提供する。
【解決手段】ワーク供給手段21にて、薄肉チップ状のワークWをピックアップ位置に供給する。ピックアップ位置では、搬送手段22にて、ピックアップ位置に供給されたワークWを180度反転させて、ピックアップ位置から所定距離離れた受取位置に搬送する。受取位置では、回転テーブル23がワークWを受取る。処理手段25にて、回転テーブル23の回転によって検査位置に供給されたワークWの電気特性等の検査を行う。処理手段25にて処理されたワークWを受取り手段70にて受取る。
(もっと読む)
処理システム,搬送アームのクリーニング方法及び記録媒体
【課題】基板搬送装置の搬送アームに付着したパーティクルを除去できる処理システム,搬送アームのクリーニング方法,及び,記録媒体を提供する。
【解決手段】基板Wを処理する処理システムにおいて,基板Wを搬送アーム35によって保持して搬送する基板搬送装置30と,搬送アーム35が進入させられる進入部S1とを備え,搬送アーム35を進入部S1に対して進入させるための入口131を設けた。この入口131における搬送アーム35の移動領域の上方に,下方に向かってクリーニング用ガスを吐出するガス吐出口183を設けた。かかる構成によれば,搬送アーム35に付着したパーティクルをクリーニング用ガスによって吹き飛ばして除去できる。
(もっと読む)
ウェーハ処理システムのレシピ・カスケーディング
【課題】クラスタツールの第1のレシピから第2のレシピへの切り換えを可能にし、同時に周期性を保って重要なポイントで何等の遅延も存在しない手順を提供する。
【解決手段】手順は、ウェーハの第1ロットをクラスタツールから出してそれを空にし、連続的及び同時に別のロットのウェーハをクラスタツールに入れることを伴う。この手順は、重要な処理段階で何等の遅延も被ることなく、搬入ロット及び搬出ロットのレシピ及び処理量要件によって求められるもの以外は追加のロボット及び処理モジュールを何も使用しないで実行される。搬入ロットはまた、搬出ロットとは異なるレシピ及び処理量要件を有してもよい。コンピュータ上にあるプログラムは、レシピ・カスケーディングを可能にするクラスタツールに対するスケジュールを判断する。このプログラムには、スケジュールを判断するために遺伝子アルゴリズム又は他の任意の最適化技術を使用してもよい。
(もっと読む)
半導体ウエハの搬送方法
【課題】半導体製造装置の稼働効率を向上させ、生産TATを短縮することができる半導体ウエハの搬送方法を提供する。
【解決手段】管理コンピュータが搬送車に、第1の処理装置で処理された半導体ウエハを第1の処理装置から第2の処理装置へ搬送させるにあたって、管理コンピュータによって第1の処理装置で処理すべき半導体ウエハがストッカ内に存在することが確認された場合、第1の処理装置で処理すべき半導体ウエハが前記ストッカから出庫され、搬送車が、ストッカから出庫された半導体ウエハを受け取り、その後、ストッカから前記第1の処理装置に向かって移動し、第1の処理装置で半導体ウエハの処理が終了した後に、搬送車は第1の処理装置で処理された半導体ウエハを第1の処理装置から受け取り、かつ、ストッカから出庫された半導体ウエハを第1の処理装置に渡す。
(もっと読む)
ロボットの制御装置および制御方法
【課題】原点位置登録時のロボットのギアの噛み合いやアームのケーシング内の軸の微小なズレによる、個々の姿勢での軌跡のゆがみ精度のばらつきを低減する。
【解決手段】ロボットに、基準原点位置を登録し(ステップ1)、各ステーション毎にアーム伸縮動作を行いながら、アームの軌跡ゆがみ量が小さくなる基準原点位置近傍の補正原点位置を特定する(ステップ2、3、4)。そして、補正原点位置と基準原点位置とを比較し、各姿勢での原点位置補正量を算出(ステップ5)し、各ステーションへのアーム動作時には、該当する補正原点位置に切替ながら、または補正量を指令値に重畳してから動作させる。
(もっと読む)
不等長リンクスカラアーム
基板搬送装置は、駆動部、コントローラ、アッパーアーム、フォアアーム及び基板保持部を有している。アッパーアームの近い方の端は、ショルダージョイントにおいて駆動部に回転可能に取り付けられている。フォアアームの近い方の端は、エルボージョイントにおいてアッパーアームの遠い方の端に回転可能に取り付けられている。基板保持部は、リストジョイントにおいてフォアアームの遠い方の端に回転可能に取り付けられている。アッパーアームとフォアアームの長さ(ジョイント中心からジョイント中心まで)は等しくない。基板搬送アームは、少なくとも2つの基板保持エリアに基板を搬送できるように構成されている。搬送の間、搬送装置の駆動部は搬送エリアに対して不動である。アッパーアーム、フォアアーム及び基板保持部は、それぞれに対して独立して回転可能である。  (もっと読む)
(もっと読む)
搬送装置
【課題】この発明は、ゴミが付着しないように処理対象物を移動できる搬送装置を提供することを課題とする。
【解決手段】 処理対象物を収容するカセットと、このカセットと密着して固定され、かつ取り外しができる扉と、カセットの底辺に設けられ搬送ローラを備える搬送装置により、ゴミが付かないように、収容されている処理対象物を搬送できる。
(もっと読む)
製造システムおよび製造方法
【課題】 汚染クラスの異なる工程間における工程抜け等に起因する次工程での汚染防止を図る。
【解決手段】 汚染クラスの異なる工程20a、20b間で、直前工程に該当する工程20aでの処理が終了したことに対応して、次工程に処理終了後の被処理物としての半導体ウエハ40aを搬送する搬送容器50のIDを変更する。次工程としての工程20bでは、直前処理の終了に対応して付与された識別子である変更IDをホストコンピュータ10a上のソフトウエア上で確認することで、直前の処理工程の抜けがないことを見極め、次工程での受け入れを適とする。かかる構成により、直前処理工程の抜けが発生した場合でも、次工程での受け入れを確実に拒否することができ、直前処理の未処理に関わる汚染状況を次工程に持ち込む虞がない。
(もっと読む)
1 - 16 / 16
[ Back to top ]