
Fターム[5F031PA08]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 特殊目的 (8,207) | 工程管理,生産管理 (1,703) | 誤動作の防止、安全管理 (133)
Fターム[5F031PA08]に分類される特許
121 - 133 / 133
ウェハカセット及びウェハ位置指示装置
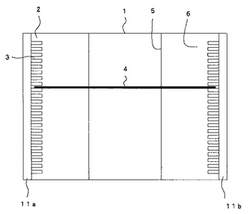
【課題】同一高さの溝を容易に認識可能にして、ウェハを水平に配置する。
【解決手段】 開口した前面を有する筐体を構成する一対の側壁11a,11bと、前記一対の側壁に夫々複数設けられた溝部3と、前記溝部へ照明光を照射するために前記筐体の裏壁又は側壁の一方に設けられる開口部5とを具備したことを特徴とする。
(もっと読む)
基板処理装置

【課題】ロボット等の基板搬送手段を衝突から守ると共に、衝突の誤検出によるエラーを回避できる基板処理装置を提供する。
【解決手段】基板を搬送する基板搬送装置であって、駆動源を備える基板搬送装置112、124と、、駆動源の状態を監視し、その状態が所定の閾値を超えたか否かで基板搬送手段の衝突等の異常を検知する検知器301とを備え、記検知器301は、生産モードとメンテナンスモードとで、それぞれ異なる閾値を有している。
(もっと読む)
ワーク搬送収納装置,およびそのワーク搬送収納装置を備えた切削装置
【課題】 検査対象となるワークを検査用ワーク収納部内に完全に収めることによりワー
クの破損およびワーク搬送収納装置の停止を防止すると共に,ワークを完全に収めた状態
を迅速に確認することが可能なワーク搬送収納装置,およびそのワーク搬送収納装置を備
えた切削装置を提供する。
【解決手段】 本発明に係るワーク搬送収納装置は,複数のワークを収納する第1のワー
ク収納部110と,第1のワーク収納部110の上部または下部に配設された第2のワー
ク収納部120と,第1のワーク収納部110および第2のワーク収納部120を同時に
昇降する昇降手段130と,第1のワーク収納部110または第2のワーク収納部120
に略水平にワークを搬送するワーク搬送手段140,150と,第2のワーク収納部12
0の搬入口から突出したワークを検知するワーク検知手段170とを備える。
(もっと読む)
ステージ駆動装置
【課題】ステージ駆動装置でありながらチャンバの変形に起因する悪影響を防止することのできるステージ駆動装置を提供する。
【解決手段】真空チャンバ1の外部に設けられたボールねじ駆動モータ12と、ボールねじ駆動モータ12の駆動力をボールねじ11に伝達するトルク伝達軸15と、トルク伝達軸15の真空チャンバ貫通部をシールするシールユニット16と、真空チャンバ1内に設けられたベース7と、を備えたステージ駆動装置において、シールユニット16がベース7に対し固定され、真空チャンバ1とシールユニット16との間がベローズ28により弾性的に且つ気密に結合されてなることを特徴とする。
(もっと読む)
製造システムおよび製造方法
【課題】 汚染クラスの異なる工程間における工程抜け等に起因する次工程での汚染防止を図る。
【解決手段】 汚染クラスの異なる工程20a、20b間で、直前工程に該当する工程20aでの処理が終了したことに対応して、次工程に処理終了後の被処理物としての半導体ウエハ40aを搬送する搬送容器50のIDを変更する。次工程としての工程20bでは、直前処理の終了に対応して付与された識別子である変更IDをホストコンピュータ10a上のソフトウエア上で確認することで、直前の処理工程の抜けがないことを見極め、次工程での受け入れを適とする。かかる構成により、直前処理工程の抜けが発生した場合でも、次工程での受け入れを確実に拒否することができ、直前処理の未処理に関わる汚染状況を次工程に持ち込む虞がない。
(もっと読む)
マスク搬送装置、及び露光装置
【課題】 スループットの低下を招かずに安全にマスクを搬送する。
【解決手段】 旋回アーム7は、搬送するレチクルを保持する保持部73a,73bと、これら保持部73a,73bをXY面内で旋回させる旋回モータ71とを備えている。保持部73a,73bは、レチクルの端部を下方から支持する支持部78a,78bと、X方向に伸びておりY方向にレチクルを挟み込んでレチクルのY方向の移動を規制する腕部77a,77bと、腕部77a,77bの両端部にそれぞれ設けられたレチクル規制部材79a,79bとを備えている。レチクル規制部材79a,79bは、腕部77a,77bがレチクルRを挟み込んだ状態で、レチクルRのX方向への動きを制限する規制部と、腕部77a,77bの挟み込み動作に伴いレチクルRが該規制部によって規制される領域内に入り込むように誘導する斜面からなるレチクル矯正部79c,79dとを有している。
(もっと読む)
マスク搬送装置及び露光装置
【課題】 マーク形成の有無に拘わらず、スループットの低下を招かずに安全にマスクを搬送することができるマスク搬送装置を提供する。
【解決手段】 マスク搬送装置は、レチクルの位置補正を行う第2アライメントステージ6と、第2アライメントステージ6とレチクルステージRSTとの間でレチクルを搬送する旋回アーム7とを備える。第2アライメントステージ6は、載置されたレチクルのマークを光学的に撮像してレチクルの位置計測を行う計測装置67を備えており、この計測結果に基づいてステージ60を駆動してレチクルRの位置補正を行う。また、第2アライメントステージ6は固定ピン68a,68b及び可動ピン68c,68dを備えており、可動ピン68c,68dを移動させて第2アライメントステージ6上のレチクルを固定ピン68a,68bに当接させることによりレチクルRの位置補正を機械的に行う。
(もっと読む)
加工装置
【課題】粘着テープTを介してフレームFと一体となったウェーハを加工することによりフレームFに粘着屑が付着した場合でも、その粘着屑の影響を受けずにその後の搬送等を円滑に行うようにする。
【解決手段】加工装置においてウェーハWを搬出入する際のウェーハWの受け渡しを行う受け取り手段11において、第一の底面支持部112と第一の側部支持部113とからなる第一のL字レール110と、第二の底面支持部114と第二の側部支持部115とからなり第一のL字レール110に対向して配設される第二のL字レール111とを備え、第一の底面支持部112の上部及び第二の底面支持部114の上部に、ウェーハカセットから搬出されたフレームの移動を規制する第一の引き出し規制部116及び第二の引き出し規制部117を対向して配設する。
(もっと読む)
基板処理装置
【課題】 メンテナンスを行う作業員の安全を確保しつつ,装置稼動効率を向上する。
【解決手段】 塗布現像処理装置1には,外壁パネル11を外すと装置内の総ての動作が停止するインターロック機構Iが設けられる。検査ステーション3のウェハ搬送ユニット40と筺体42との間には仕切板60が設けられる。仕切板60には搬入出口60aが形成され,搬入出口60aにはシャッタ61が設けられる。検査ステーション3の外壁パネル11にはスイッチ部材170が設けられる。筺体42内の検査ユニット51のメンテナンス時には,スイッチ部材170を押してシャッタ61を閉じることによって,ウェハ搬送ユニット40のある空間Kと筺体42のある空間Lを遮断され,作業員の安全が確保される。シャッタ61が閉まると,インターロック無効機構Rによってインターロック機構Iが無効になり,装置内の他の部分の稼動を継続できる。
(もっと読む)
載置機構
【課題】ダイシングフレーム専用のキャリアCは、最下段の左右の溝1A、1Aの底面と下端部の案内棒3との間の隙間δ1が、それより上段の溝1A、1Aの底面間の隙間δ2より狭く、しかも前者の隙間δ1が搬送アームの厚さよりも僅かしか広くないため、図3の(b)に示すように最下段のダイシングフレームDを搬出する時に搬送アーム4やダイシングフレームDを損傷する虞があった。
【解決手段】本発明の載置機構10は、ダイシングフレームを収納するキャリアCを載置する機構であって、キャリアCを載置する載置台11と、この載置台11内に配設され且つ載置台11の上面11Aに形成された4箇所の開口部11Bから出没してキャリアCの最下段に収納されたダイシングフレームDを昇降させる出没部材12と、これらの出没部材12を開口部11Bにおいて出没させる駆動機構とを有する。
(もっと読む)
駆動装置及びその駆動方法
【課題】 オープンループ制御により、精確な動作が可能な駆動装置及び駆動装置の制御方法を提供する。
【解決手段】 駆動制御部10から出力される制御信号に基づいて、ドライバ11から所定の駆動信号が出力されて駆動源15を動作させる。駆動制御部10による制御動作が終了すると、振動制御部12が駆動源を一定期間に正逆方向に交互に駆動させるような駆動制御信号を発生する。これにより駆動源15は微振動する。駆動源の微振動による駆動力方向の力が、摩擦力等の負荷により抑制され最後まで動作できずに残存している駆動力と合算されて、駆動方向の力が摩擦等の負荷よりも大きくなると、動作部は残存駆動力に応じた距離だけ移動する。これにより、駆動制御部10の制御信号に基づく動作が精確に実行される。
(もっと読む)
半導体ウェーハを取り扱うエンドエフェクタ
半導体ウェーハを取り扱ういろいろなエンドエフェクタの設計が開示されている。例えば、比較的低温でウェーハを取り扱うエンドエフェクタが、比較的高温でウェーハを取り扱うエンドエフェクタとともに開示されている。いずれのエンドエフェクタも、ウェーハの縁部で該ウェーハに単に接触するように構成されている、独自に設計された支持部材を含んでいる。エンドエフェクタは、また、ウェーじゃ検出システムを含み得る。比較的低温でウェーハを取り扱うエンドエフェクタは、また、ウェーハを位置決めするばかりでなく、エンドエフェクタに取り付けられているロボット・アームにより引き起こされるエンドエフェクタの加速または減速中、エンドエフェクタ上のウェーハを保持するのに使用される押し装置を含み得る。設計されているように、エンドエフェクタは、非常に薄い外形を有し、簡単に操縦しやすいエンドエフェクタを作り得る。
 (もっと読む)
(もっと読む)
ワーク搬送用ロボット
【課題】アームの熱膨脹収縮により生じるハンド部材の偏位量を許容範囲内に収めることができるアーム回動形のワーク搬送用ロボットを提供する。
【解決手段】固定プーリ8,27と、一端が固定プーリ8,27に対して回動自在に支持されたアーム13,26と、アーム13,26の他端に回転自在に支持された回転プーリ15,29と、固定プーリと回転プーリとの間に張設されたベルト17,30とを備えたアーム機構を多段に設けて、最終段のアーム機構の回転プーリ29にハンド部材40を取り付けたワーク搬送用ロボットにおいて、アーム13,26の熱膨脹収縮によりハンド部材40に生じる偏位を許容範囲に収めるように、テンションローラ22,35からベルト17,30に与える張力を調整するようにした。
(もっと読む)
121 - 133 / 133
[ Back to top ]