
Fターム[5F031PA08]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 特殊目的 (8,207) | 工程管理,生産管理 (1,703) | 誤動作の防止、安全管理 (133)
Fターム[5F031PA08]に分類される特許
41 - 60 / 133
ガラス基板用の担体
薄いガラスシート(7)用の担体(31)が開示される。担体は、第1(15)および第2(17)の対向表面を有するエラストマー(9)と、前記エラストマー(9)の第1の表面(15)に接着した支持体(11)とを備えている。使用中、薄いガラスシート(7)がエラストマーの第2の表面(17)に直接接触し、かつ、取り外し可能に接着する。薄いガラスシート(7)に、強いが、取り外し可能な接着を提供するため、エラストマーの第2の表面(17)は10〜90の範囲のショアA硬さおよび185ナノメートル以下の粗さを有する。このようにして、担体/ガラスシート組立体(13)は、薄いガラスシート(7)の露出面(23)における電子部品の製造の間に遭遇する状況に耐えることができる。 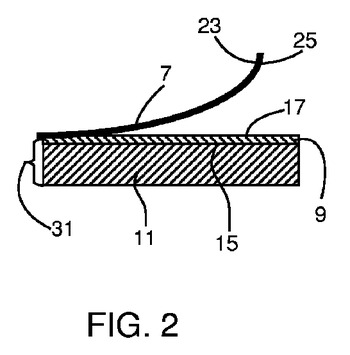 (もっと読む)
(もっと読む)
ウエーハ加工装置

【課題】ウエーハ、カセット及び搬送手段の破損を防止するウエーハ加工装置を提供。
【解決手段】ウエーハカセット50と、カセット載置台74と、カセットにウエーハを搬入・搬出する搬送手段54とを備え、搬送手段は、載置台に載置されたカセットに進退可能に配設され、カセットに対してウエーハを搬入・搬出するウエーハ加工装置であって、搬送手段とカセット又はウエーハとの衝突を検出する衝突検出機構90と、搬送手段を制御する制御手段とを具備し、載置台は、ウエーハ加工装置の架台上に微少動可能に組みつけられ、衝突検出機構は、載置台又は架台の何れか一方に固定された作用板と、載置台又は架台の他方に作用板と対向して配設された接触スイッチとを含み、搬送手段と、カセット又はウエーハとの衝突時に発生する載置台の微小動によって接触スイッチが作用板に接触することで衝突を検出し、衝突を検出した際、搬送手段の動作を停止させる。
(もっと読む)
ロボット及びその制御方法

【課題】ロボットの解体・点検作業を必要とするようなトラブルが発生する前に、ロボットの異常状態を検出すること。
【解決手段】本発明のロボットにおいては、ロボット制御手段40が、アーム駆動手段及び手首軸駆動手段を駆動してエンドエフェクタ25を所定の実位置に移動させ、エンドエフェクタ25が所定の実位置に到達した時点でのロボットアーム28の姿勢及び手首軸の角度位置を検出し、その検出結果に基づいて所定の実位置に対応する計測位置を算出して記憶し、異なる時点において取得された複数の計測位置の時系列データに基づいてロボットの状態を判定する。
(もっと読む)
半導体ウエハ処理方法
【課題】 積層された半導体ウエハと保護シートとを取り違えることなく吸着して搬送することができるようにする。
【解決手段】 可撓性アーム26の先端部下面で保護シート22を吸着して持ち上げる。この場合、保護シート22の重さは1〜2gと比較的小さい。このため、保護シート22を持ち上げた可撓性アーム26の撓み量は比較的小さい。一方、可撓性アーム26の先端部下面で半導体ウエハ23を吸着して持ち上げた場合には、半導体ウエハ23の重さが保護シート22の重さの数十倍とかなり大きいので、可撓性アーム26の撓み量は比較的大きい。可撓性アーム26の撓み量は歪みゲージ27で検出される。そして、半導体ウエハ23と保護シート22との重さの相違から、今、可撓性アーム26で持ち上げているものが保護シート22および半導体ウエハ23のいずれであるか判別される。この後、保護シート22または半導体ウエハ23を吸着部材で吸着して別の箇所に搬送する。
(もっと読む)
半導体装置の製造方法及び検査用ソケット
【課題】半導体装置の歩留りの向上を図る。
【解決手段】トレイ7には、それぞれにウェハレベルCSP5を収容可能な複数のポケット7aが設けられており、かつそれぞれのポケット7aには、ウェハレベルCSP5の複数の半田バンプ3を支持する台座部7bと、台座部7bの周囲に形成された側壁7cとが設けられており、ウェハレベルCSP5の製造の後工程における工程間の搬送などで、このトレイ7のポケット7aでウェハレベルCSP5を収容した際に、半導体チップの主面の有機膜を支持するのではなく複数の半田バンプ3を台座部7bによって支持することにより、前記有機膜に傷が形成されたり、前記有機膜が剥離して異物となって製品に付着したりすることを防止でき、その結果、製品であるウェハレベルCSP5(半導体装置)の歩留りや品質の向上を図る。
(もっと読む)
静電容量感知機能を有する静電チャック組立体及びその動作方法
半導体ウエハなどの加工物を処理するための半導体加工処理装置が提供される。関連する作動制御方法がまた提供される。前記装置は、加工物を受けるように構成された静電チャック及び静電チャックに接続された固定電圧電源を含む。静電チャックは固定電極組立体を有し、固定電圧電源は固定電極組立体に接続される。固定電圧電源は、固定電極組立体のための直流固定電圧を生成するように構成された直流(DC)電圧発生器と、固定電極組立体のためのAC励起信号を生成するように構成された交流(AC)電圧発生器と、固定電極組立体に接続された処理構成とを含む。該処理構成は、AC励起信号に応じて得られる加工品の存在信号の特質を分析し、またその特質に基づいて、静電チャックに関する加工品の適当/不適当な位置決めを確かめるように構成される。 (もっと読む)
ロードポート装置の開口部へ向けてガスを噴出するパージ装置を制御し、ロードポート装置に取り付けて使用されるパージ制御装置及びそれを備えるロードボート装置
【課題】ロードポート装置、加工処理装置の構造的な改良と、制御プログラムの改良と、を最小限に抑えることが可能なパージ制御装置を提供する。
【解決手段】パージ装置32は、加工物1を収容するクリーンボックス2から、加工物を壁に設けられた開口部10を介して内部空間へ出し入れするロードポート装置3に取り付けて使用され、開口部へ向けてガスを噴出しパージ処理をする。パージ装置を制御するパージ制御装置31は、ロードポート装置に電気的に接続され、ロードポート装置を動作させる動作命令を生成する上位装置51から、動作命令を受信する送受信手段35と、上位装置から受信した動作命令を、ロードポート装置とパージ装置とにパージ処理を含む動作をさせる変換動作命令に変換する制御手段33と、を備える。制御手段により変換された変換動作命令が、ロードポート装置とパージ装置とへ送受信手段により送信される。
(もっと読む)
ウエハ搬送システム、および、ウエハ収納カセット
【課題】カセット内のウエハの状態を迅速に知ることができるウエハ搬送システム、および、ウエハ収納カセットを提供する。
【解決手段】複数のウエハを収納するカセットに読み出し書き込み可能なメモリを備えた無線タグを設け、カセットをウエハ搬送装置へ設置したときに、カセット内のウエハの有無を検出するセンサに電源が供給されて、無線タグにウエハの有無の情報が書き込まれ、ウエハ搬送装置に設けられた読み取り装置で、無線タグのメモリに記憶されたウエハに関する情報を読み出し、当該ウエハを搬送アームでカセットから取り出す構成とした。
(もっと読む)
半導体搬送装置
【課題】安全かつ簡易な構成の半導体搬送装置のメンテナンスにおいて行うロボット遠隔教示作業のインターロック系統切替機構を備えた半導体搬送装置を提供する。
【解決手段】点検調整用の開口部10と、この開口部10を蔽う開閉自在のカバー2と、このカバー2が開状態のときインターロック3が作動し、装置の駆動を停止させるインターロック回路3と、を備えた搬送用ロボットによって半導体試料を搬送する半導体搬送装置1であって、さらに、カバー2が開状態のときに、操作できるキースイッチ4を有し、キースイッチ4は、ノーマルモードNとメンテナンスモードMを選択することができ、ノーマルモードNは、インターロック3を有効とし、メンテナンスモードMは、インターロック3を無効にするとともに、さらに搬送ロボットの搬送位置を調整する遠隔教示用のティーチングペンダント5の使用を有効とさせる構成とした。
(もっと読む)
ウェーハ加工装置
【課題】効率的な除湿がなされる除湿手段を備えたウェーハ加工装置を提供する。
【解決手段】チャックテーブル26に空気吸引作用を発生させる減圧管30や、切削ユニット47,57のエアベアリング機構に供給する圧縮空気を除湿する除湿装置80を備える。除湿装置80には、除湿によって分離された水分を外部に放出するためのパージ用空気が供給されるが、そのパージ用空気として、減圧管30および切削ユニット47,57から排出される圧縮空気を再利用する。従来のように除湿した圧縮空気の一部をパージ用空気に利用するといったロスを生じさせず、除湿の効率化を図る。
(もっと読む)
真空装置、真空処理システムおよび真空室の圧力制御方法
【課題】 真空室に配備されたゲートバルブの作動用エアの供給が不足した場合でも、ゲートバルブが急激に開放されることを防止する。
【解決手段】 圧力制御機構201では、エアシリンダ123へ供給されるエアが停止すると、メカニカルバルブ121のポートが切り替わり、エアオペレートバルブ113が開放され、真空リーク用ポート109、気体導入配管111および連通孔107を介して真空状態の搬送室3内へ外部気体が少しずつ流入する。搬送室3の圧力制御は、逆止弁103およびバッファタンク105によってエアシリンダ47の作動用エアを確保した状態で行われるため、ゲートバルブ7bの急激な開放が防止される。
(もっと読む)
半導体製造装置における地震被害拡散低減方法及び地震被害拡散低減システム
【課題】地震の発生を予知して開放中の収納容器からの被処理体の飛び出しを防止し、被害を最小限に抑える。
【解決手段】収納容器3の搬送機構13を有する搬送領域Saと、熱処理炉5よりも下方の作業領域Sbに設けられ蓋体17上に複数枚の被処理体を搭載した保持具4を支持して熱処理炉に搬入搬出する昇降機構18と、搬送領域Saと作業領域Sbを仕切る隔壁6の開口部を移載部の収納容器の蓋と一緒に開閉するドア機構15と、通信回線26を介して配信される初期微動に基く緊急地震情報を受信する受信部28又は初期微動を直接検知する初期微動検知部と、受信した緊急地震情報又は検知した初期微動に基いて半導体製造装置1の運転を停止する第1工程、及び、上記ドア機構15が開状態にある時にドア機構15を閉作動させる第2工程を実行する制御部29とを備える。
(もっと読む)
プラズマ処理システムにおいてエンドエフェクタのアラインメントを校正するためのシステムおよび方法
【課題】プラズマ処理システムにおいてエンドエフェクタのアラインメントを校正するためのシステムおよび方法
【解決手段】プラズマ処理システムにおいてチャックに対するエンドエフェクタのアラインメントを校正するための方法が提供される。方法は、エンドエフェクタをチャックの上に位置決めすることと、チャックおよびエンドエフェクタの静止画像を撮影することとを含む。方法は、チャックの中心およびエンドエフェクタによって定められたエンドエフェクタ規定中心を決定するために静止画像を処理することを含む。方法は、エンドエフェクタ規定中心とチャックの中心との間の位置差を決定することを含む。方法は、また、エンドエフェクタがウエハを運ぶときにロボットメカニズムが位置差を調整するようにロボットメカニズムを制御するために、位置差をロボットコントローラに提供することも含む。
(もっと読む)
ウェハ検出用センサ
【課題】従来のウェハ検出用センサでは狭視界タイプの透過形センサを用いたために、その投光ビームが小さくなって、光軸調整が必要であり、投、受光部のそれぞれ2ケ所に光軸調整機構を設けなければならない。
【解決手段】ウェハ22が光ビームを遮り、この光ビームの遮断を受光側で検出することによって前記ウェハの有無を検出するウェハ検出用センサであって、光ビームを出射して投光ビームF1を形成する投光部と、検出領域からの光である受光ビームF−1を受光する受光部とを備えたセンサ部1と、投光ビームF1を入射光として反射して受光ビームF−1を形成すると共に、投光ビームF1の進行方向である光軸と受光ビームF−1の進行方向である光軸との位置を変える直角プリズム2とを備え、ウェハ22の有無を検出する光ビームに投光ビームF1を使用したものである。
(もっと読む)
基板処理装置
【課題】 基板処理装置の内部に滞留している基板を基板及び基板処理装置の損傷を抑制させつつ短時間で回収することが可能な基板処理装置の提供。
【解決手段】基板を処理する処理室と基板を搬送する搬送手段と搬送手段を制御する制御手段とを備え、制御手段は、基板の搬送経路上の複数の位置にて基板の有無を検出するセンサと、操作員による操作を受け付ける操作端末とを備え、センサからの検出信号に基づいて搬送経路上における基板の位置を示す基板位置情報を作成するとともに、基板を搬送する度に基板位置情報を更新し、基板位置情報に基づいて基板処理装置の画像上に基板の画像を移動可能に表示した画面を操作端末に表示し、基板位置情報にて示される基板の位置と実際の基板の位置とが異なるエラーを発見した場合には、搬送手段による搬送動作を一時中断するとともに、操作端末からの基板の画像の移動操作を受け付けて基板位置情報を更新する。
(もっと読む)
真空保持設備および真空保持設備を有するウェハダイシング装置
【課題】無電力の場合でも真空状態を保ち続ける真空保持設備を提供する。
【解決手段】第1電磁弁14の一端は、吸気ポート11に接続し、他端は真空生成器13のガス入口131に接続しており、電力により動作するとき、ガスが第1電磁弁14を流れ、真空生成器13のガス入口131に入り、真空出力を生成する。第2電磁弁15の一端は、吸気ポート11と真空生成器13の真空出口133と並列的に接続し、他端は出力ポート12に接続しており、それを操作して出力ポート12をガス出力または真空出力とすることができる。また、切り替えスイッチ16の一端は吸気ポート11に接続し、他端は真空生成器13に接続し、正常な操作のときには切り替えスイッチ16を閉じ、突発的な電力のない状況が発生した場合に切り替えスイッチ16を開き、ガス源がこの通路を介し真空生成器13に供給され、真空を生成し続け、ウェハの吸着を継続する。
(もっと読む)
搬送装置
【課題】天井走行式搬送車を有する搬送装置において、人を含む障害物を的確に検出して安全性を確保する。
【解決手段】この搬送装置は天井走行式の搬送車を有する。搬送車の進行方向側の表面の略全体を覆う位置には、障害物の接触を検出する為のカバーを含む障害物検出装置が設けられている。よって、搬送車の進行方向側に存在する障害物を確実に検出できる。搬送車は、自身を駆動する為の駆動部と駆動部を制御する制御部を有し、障害物検出装置は障害物検出手段等を有する。障害物検出手段は、カバーへの障害物の接触時にカバーと障害物検出手段との相対的な距離に基づき制御部に対して障害物検出用の出力信号を出力する。制御部は、その出力信号に基づき駆動部を停止させる。よって、カバー全体が接触式スイッチとして機能し、搬送車の進行方向側に存在する障害物がカバーのどの位置に接触しても搬送車を直ちに停止させることができ安全性を確保できる。
(もっと読む)
基板処理装置
【課題】基板保持手段に基板が保持されているか否かに応じて、処理液供給手段の供給動作を適切に禁止することができる基板処理装置を提供すること。
【解決手段】 薬液表面側バルブ23の開成タイミングに至ったとき(ステップS1でYES)、CPU60は、ウエハ保持センサ9からの出力をチェックする(ステップS2)。スピンチャック3にウエハWが保持されていない場合には(ステップS3でNO)、薬液ノズル4が退避位置以外に位置していれは(ステップS4でNO)、CPU60は、薬液表面側バルブ23の開成を禁止する(ステップS5)、薬液ノズル4が退避位置に位置していれは(ステップS4でYES)、CPU60は、薬液表面側バルブ23の開成を許可する(ステップS7)。この場合、表面側プリディスペンス処理を実行することができる。
(もっと読む)
処理装置
【課題】搬送ユニットを有する外部装置と接続して使用する処理装置の安全性をより確実にする。
【解決手段】物品を処理する処理ユニットと、外部装置と前記処理ユニットとの間に配置された受け渡し部と前記処理ユニットとの間で物品を搬送する搬送ユニットと、該外部装置に対し前記受け渡し部への該物品の搬送を要求する要求信号を出力する制御部と、当該処理装置における保守の開始を示す信号を出力する出力部と、を有する処理装置において、前記制御部は、該要求信号を出力した後、前記出力部により出力された該保守の開始を示す信号に基づき、該外部装置に対し、前記受け渡し部への該物品の搬送を停止させるための信号を出力するように構成する。
(もっと読む)
基板回転保持装置およびこれを備えた基板処理装置
【課題】基板の任意の停止位置および任意の回転位置で基板の保持状態および非保持状態を容易に検出することが可能な基板回転保持装置およびこれを備えた基板処理装置を提供する。
【解決手段】スピンベース1の上面に設けられた各回動式保持部材2の支持部21の内部には、磁石2aがそれぞれ設けられている。各回動式保持部材2の近傍には、ホール素子3が設けられている。各ホール素子3は、対応する各回動式保持部材2が時計方向および反時計方向に回転した場合に、各磁石2aの磁力をそれぞれ検出する。スピンベース1の下面の受電コイル4の外側を取り囲むように回転軸Pを中心として環状の6つの発光素子群6a〜6fがそれぞれ設けられている。これらの発光素子群6a〜6fとそれぞれ所定の距離(スピンベース1の厚さ方向の距離)を隔てて、直径が異なる環状の6つの受光素子群9a〜9fがそれぞれ設けられている。
(もっと読む)
41 - 60 / 133
[ Back to top ]