
Fターム[5H004GA35]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 部品減少、回路簡略を図ったもの (16)
Fターム[5H004GA35]に分類される特許
1 - 16 / 16
ポテンショメータ装置
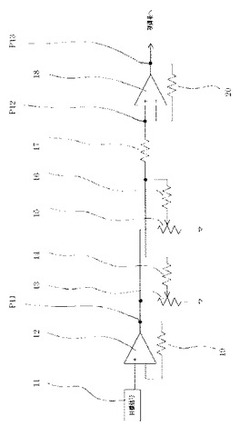
【課題】 簡単で且つ安価な構成で、ポテンショメータの摺動部に起因するノイズの影響を効果的に且つ的確に軽減除去する。
【解決手段】 目標信号源11からの目標信号は、ボルテージフォロワとして構成された第1のオペアンプ12に供給され、第1のオペアンプ12の出力点P11の電圧は、目標信号源11の出力電圧となる。この電圧に対し、ダイアル摘みの操作により設定された並列的な第1のポテンショメータ13および第2のポテンショメータ15がアッテネータとして働き、出力点P12の信号は、第1のポテンショメータ13によりアッテネートされた信号と第2のポテンショメータ15によりアッテネートされた信号との平均値となる。第2のオペアンプ18は、ボルテージフォロワとして構成されており、出力点P13の電圧は、出力点P12の信号電圧と等しくなる。この出力点P13の信号を、目標信号として制御系に入力する。
(もっと読む)
温度調節器、ケーブル装置、および温度調節ユニット

【課題】安価な温度調節器を提供することである。
【解決手段】温度調節器11は、温度を調節し、ケーブル装置29を着脱可能である。温度調節器11は、ケーブル装置29を接続するための接続部を受け入れる特定形状の受入口を有することなく、入力信号を処理する回路基板12の一方側の面12a上に形成され、ケーブル装置29に接触する基板側接触部21を含む。したがって、温度調節器11は、回路基板12の一方側の面12a上に形成される基盤側接触部21により、ケーブル装置29を接続することができる。この場合、温度調節器11において、ケーブル装置29を接続するための接続部を受け入れる特定形状の受入口を有する必要がない。その結果、安価な温度調節器11とすることができる。
(もっと読む)
圧力制御装置及び圧力制御方法
【課題】サーボモータにより動力伝達手段を介して作動体を動作させて受圧体に与える力を、ロードセル等を使わずに正確に制御し、機械の構成を簡単にし、信頼性を得る。
【解決手段】サーボモータ11により射出圧力を制御する電動射出成形機1の制御装置15は、電動射出成形機1の制御モデルに対して構築され射出スクリュー5が発生する力を推定するオブザーバ19と、サーボモータ11に対する電流指令値Iとパルスエンコーダ14の回転位置θとによりオブザーバ19が推定した力を入力して射出スクリュー5に作用させる力をフィードバック制御する射出圧力フィードバック制御部20とを備え、オブザーバ19は、電流指令として重畳させた振動に応じて生じる抗力が、機械インピーダンス要素を介して被駆動部に作用する力を外乱として同定した制御モデルに基づいて構成される外乱オブザーバ部を備え、被駆動部に作用する力を推定する。
(もっと読む)
駆動装置、駆動方法、及び装置
【課題】簡易な構成でありながら位置決め精度を高められる駆動装置、駆動方法、及び装置を提供する。
【解決手段】駆動装置(1a)は、回転駆動する駆動部(10)と、駆動部(10)の駆動出力軸の回転角度位置を検出し第1の位置情報を生成する第1の位置検出器(31)と、駆動部(10)の駆動出力軸に接続された減速機(20)と、減速機(20)の減速出力軸の回転角度位置を検出し第2の位置情報を生成する第2の位置検出器(32)と、第1の位置情報と前記第2の位置情報とを選択的に用いて駆動部(10)を制御する制御部(100a)と、を備える。
(もっと読む)
サーボ制御回路、アクチュエータの制御装置、および撮像装置
【課題】周波数が高い領域においても良好な制御特性を維持するとともに、集積回路化が容易なPID制御によるサーボ制御回路を提供する。
【解決手段】サーボ制御回路100において、差分演算部10は、制御対象から検出された検出信号xに比例した量と第1の信号fに比例した量との差uを出力する。A/D変換部21は、差分演算部10の出力uをデジタル変換する。積分部22は、A/D変換部21の出力Uをデジタル積分する。D/A変換部23は、積分部22の出力に比例した量Fをアナログ変換して、第1の信号fとして出力する。加算演算部15は、A/D変換部21の出力Uに比例した量と積分部22の出力Fに比例した量との和Dを出力する。デジタルPI制御部40は、加算演算部15の出力Dと目標値Rとの偏差Eに基づいて比例演算および積分演算を行なうことによって、制御対象を制御する制御信号Yを生成する。
(もっと読む)
状態空間の探索方法および状態空間の探索装置
【課題】探索の効率化を図り、少ない処理時間でより良い状態を得ることができる状態空間の探索装置を提供する。
【解決手段】指定された着目状態から出発し、第1の距離を有する隣接状態の中から遷移する状態を決定して次の着目状態とすることを順次繰り返し、遷移する状態において最良の評価値を持つ状態から評価値の良い上位n個の評価値を持つ状態までを探索する第1の探索手段2と、評価値の良い上位n個までの評価値を持つ状態を各々初期の着目状態とし、第1の距離より小さい距離の第2の距離を有する隣接状態の中から遷移する状態を決定して次の着目状態とすることを順次繰り返すことにより、評価値の良い上位n個までの評価値を持つ状態を各々初期の着目状態とする各々の最良の評価値を持つ局所最良状態を探索する第2の探索手段4と、複数の局所最良状態の中から、最良の評価値を持つ状態を最良状態とする最良状態探索手段5とを備える。
(もっと読む)
サーボモータの駆動制御装置及び駆動制御方法
【課題】少ないメモリのCPUでも学習制御を可能とし、さらに学習時間の短縮を実現可能なサーボモータの駆動制御装置を提供する。
【解決手段】駆動制御装置10は、位置ループ制御系に追加された学習制御部24を有し、学習制御部24は反転動作前後の所定時間に限って学習制御を行うように構成されている。学習制御によって得られる速度指令を解析して求められる速度補正データは、反転動作時に発生する位置偏差を低減すべく速度指令の補正を行うために使用される。
(もっと読む)
鋳型内の湯面定在波変動検出方法、湯面定在波制御方法、湯面レベル制御方法および連続鋳造方法
【課題】1つの湯面レベルセンサーから得られる湯面変動から高精度に定在波変動分と体積変動分とを分離し、湯面定在波・湯面レベルを制御する、鋳型内の湯面定在波変動検出方法、湯面定在波制御方法、湯面レベル制御方法および連続鋳造方法を提供することを目的とする。
【解決手段】連続鋳造機の鋳型内の所定位置における湯面レベル変動の定在波変動分の定在波周波数を、鋳型幅から算出し、その周波数で定在波をsin関数とcos関数で記述して、その記述された定在波の係数を測定した湯面レベル変動からオンライン推定することにより、定在波変動分を求める。
(もっと読む)
調節計、及びその動作方法
【課題】利便性を向上することができる調節計、及びその動作方法を提供すること。
【解決手段】本発明にかかる調節計は、計測値を設定値に近づけるように、制御パラメータに応じた操作量を制御対象に出力する調節計であって、計測値に基づいて制御応答の特徴量を算出する演算処理部11と、特徴量を保持するメモリ領域を複数有する書換可能なEEPROM12と、を備え、メモリ領域12a、12bに対応した特徴量を利用して各メモリ領域の書き込み優先度を算出し、優先度を利用して書き込み対象のメモリ領域12aを決定し、設定値を変更した際に、書き込み対象のメモリ領域12a上の特徴量のデータが無効と識別可能な状態にし、メモリ領域12a上の特徴量のデータが無効と識別可能な状態になった後、メモリ領域12a上に最新の制御動作で検出された特徴量を書き込むものである。
(もっと読む)
サーボ制御装置
【課題】 モータ位置検出器を用いずに負荷位置検出器のみで安定且つゲインを大きく設定することができるようにする。
【解決手段】 負荷位置検出器と負荷位置検出値を用いて負荷加速度と躍度を演算する微分器と、それぞれにゲインを乗じて補償信号を算出する補償器と補償器の出力をトルク指令値に加算する加算器を備える。
(もっと読む)
モーションキャプチャシステムを用いた閉ループフィードバック制御
モーションキャプチャシステムを用いた制御可能装置の閉ループフィードバック制御のためのシステムおよび方法が開示される。一実施例では、システムは、1つ以上の制御可能装置が制御体積内で作動している際に、1つ以上の制御可能装置の1つ以上の運動特性を測定するよう構成されたモーションキャプチャシステムを含む。プロセッサは、モーションキャプチャシステムから測定された運動特性を受信し、測定された運動特性に基づいて制御信号を決定する。位置制御システムは制御信号を受信し、所望の位置状態を維持または達成するために、1つ以上の制御可能装置の少なくとも1つの運動特性を連続して調節する。制御可能装置は受動的な逆反射マーカを装備していてもよい。モーションキャプチャシステム、プロセッサ、および位置制御システムは、完全な閉ループフィードバック制御システムを備える。  (もっと読む)
(もっと読む)
サーボモータ駆動制御装置
【課題】指令の形状に依存して位置偏差のサンプリング周期を可変にして、補正データを記憶するメモリ容量を減らす。
【解決手段】サーボモータ3に繰り返される周期的な位置指令を与えるCNC2から位置指令を受け、かつ位置検出器4から被駆動体の位置を示す信号を受け、位置指令と被駆動体の位置との第1位置偏差を取得する手段13と、CNC2から与えられた情報に応じて第1位置偏差をサンプルするサンプリング周期Bを可変可能に計算する手段14と、サンプリング周期Bに従って第1位置偏差をサンプルして得た第2位置偏差を取得する手段15と、第2位置偏差より第1補正データを求める補正データ算出手段20と、第1補正データを繰り返される周期的な位置指令の少なくとも1周期分記憶する記憶手段21とを備え、第1位置偏差と第1補正データに基づき被駆動体を位置制御する。
(もっと読む)
制御対象シミュレーション装置
【課題】少ないデータ量から多くのデータ量を生成して処理する制御対象シミュレーション技術を提供する。
【解決手段】制御対象シミュレーション装置は、時刻に対して変化し、所定の制御対象に関する物理量について、複数の時刻におけるデータを受け付け、受け付けたデータから任意の時刻に関するデータを算出し、算出される前記任意の時刻に関するデータに基づいて前記制御対象に関する物理量を制御する制御量を生成する制御装置から、前記制御量を入力し、前記任意の時刻に関するデータおよび前記任意の時刻における制御量にしたがって前記制御対象の動作を模擬し、前記任意の時刻の後の時刻におけるデータを生成する。
(もっと読む)
振動検出装置
【課題】電動機位置の振幅を用いて機台に検出器を付けることなく前記機台の振動を検出できる振動検出装置を提供する。
【解決手段】位置を入力し位置振幅を出力する位置振幅検出器101と、前記位置振幅を入力し機台振動トルク振幅を出力する機台振動トルク振幅検出器102と、前記機台振動トルク振幅を入力し機台支配モード固有周波数を検出し出力する共振周波数検出器103を備える。
(もっと読む)
サーボシステム、サーボシステムを含む装置、シグマ・デルタ変調器およびシグマ・デルタ変調器を含む集積回路
第1および第2のアナログ制御信号から正規化されたディジタル・誤差補正信号を生成するアナログ・シグマ・デルタ変調器を含むサーボシステム。このシグマ・デルタ変調器は、アナログ低域フィルタと、ディジタル・誤差補正信号を送達する量子化器と、量子化器の出力と低域フィルタの入力との間にフィードバック配置され、フィードバック信号に前記アナログ制御信号の和を乗じる乗算DA変換器とを含む。  (もっと読む)
(もっと読む)
繰り返し制御系及びこれを含むドライブサーボシステム
本発明は一般に半波対称性を有する周期信号を抑圧する繰り返し制御系の分野に関し、特に周期NTの周期信号を供給されるメモリループとして構成される繰り返し制御系であって、メモリの大きさとしてN/2個のメモリ素子を含み、負のフィードバック接続を適用し、メモリループの出力において係数−1/2を設定することを特徴とする繰り返し制御系に関する。このような繰り返し制御系は例えば記録媒体にデータを記録するヘッドを有する記録再生装置におけるドライブサーボシステムの外乱補正モジュールにおいて適用されうる。  (もっと読む)
(もっと読む)
1 - 16 / 16
[ Back to top ]