
Fターム[5H004JA07]の内容
フィードバック制御一般 (10,654) | 設定部 (547) | 絶対値により設定されるもの (56)
Fターム[5H004JA07]に分類される特許
1 - 20 / 56
制御システム、制御装置、および制御方法
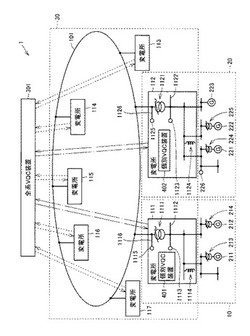
【課題】個別VQC方式を用いた電力系統の電圧値が運用制約範囲の上限および下限の少なくとも一方を超えることを低減する。
【解決手段】個別VQC装置401は、検出された500kV母線101の電圧値を用いて、電力系統10における目的関数の最適解を決定する。個別VQC装置401は、最適解を用いて個別電圧無効電力制御を行なう。個別VQC装置401は、通信インターフェイスを用いて最適解を全系VQC装置301に送信する。目的関数は、電力系統10における電圧に関する運用制約の範囲内の中間値に対する、最適解の解候補に応じた電力系統10の電圧値についての偏差を示した項を加算項として含む。
(もっと読む)
道路トンネル換気制御装置及び道路トンネル換気制御方法

【課題】対面通行型トンネルまたは一方通行型トンネルにおいて、火災発生地点からの煙の拡散効果を短時間で確実に抑えることができ、より安全なトンネル環境を維持できるようにする。
【解決手段】トンネル本線上で、火災発生時にトンネル内の風速を低風速化する低風速化演算部と、トンネル本線において、施工後の換気システムの性能評価を行うための性能評価手段と、を備える。この低風速化演算部は、火災発生地点から両坑口に設置された風向風速計の内、どちらを使用するかを判定する制御判定手段と、風向、風速からジェットファンの運転台数及び回転方向を設定するための演算手段からなるジェットファン運転台数・回転方向設定手段とを含み、これら両坑口に設置された風向風速計とトンネル内に設置されたジェットファンを用いて、火災発生地点の風速を制御する。
(もっと読む)
PIDパラメータ調整装置および調整方法
【課題】ハンチングの発生を確実に回避する。
【解決手段】PIDパラメータ調整装置1は、リミットサイクル式のオートチューニング(AT)によりPIDパラメータを算出してPID制御装置2に設定するAT実行部3と、PID制御装置2がPIDパラメータに基づいて制御対象に対する制御を開始した後に、制御量PVにハンチングが発生した場合に、ハンチングを抑制すべくPIDパラメータを修正するハンチング抑制部5と、制御の整定状態を検出したときに、ハンチング抑制部5によるハンチング検出とハンチング抑制とを終了させる整定検出部6と、PID制御装置2の修正前のPIDパラメータと修正後のPIDパラメータとの変化比率に基づき、AT実行部3の算出係数を修正するAT算出係数修正部7とを有する。
(もっと読む)
多関節型ロボットの制御方法
【課題】静的な条件で計測し、テーブル化されたコギング補償電流テーブルによる従来のFFコギング補償方式では、重力補償電流による最適位相の変化やエンコーダ取付誤差による最適位相の誤差に対応した位相シフトが行われず、十分な振動抑制効果を発揮できないという課題を有していた。
【解決手段】重力トルク補償電流の検出及びその検出値によるコギング補償位相の補正手段を持ち、さらに、FFコギング補償無効時のモータ電流からコギング周波数成分の検出及びその検出値によるコギング補償最適位相のモータ個体差の補正手段を持つことで、重力補償電流によるコギング補償の最適位相の変化あるいはエンコーダ取付誤差による最適位相誤差が存在しても、コギングトルクに起因する振動を抑制することができる。
(もっと読む)
機械的共振周波数補償装置
【課題】共振周波数を算出する際の処理速度を向上させる。
【解決手段】サーボモータシステム1は、モータ2に接続されるサーボコントローラ3に機械的共振周波数補償装置21が設けられている。機械的共振周波数補償装置21は、エンコーダ4から速度フィードバック値が入力されるバンドパスフィルタ22と、共振周波数推定器23と、ノッチフィルタ係数発生器24とを備え、共振周波数推定器23は共分散行列の逆行列の値を用いた最小二乗理論によって算出される収斂値としてノッチフィルタの係数を求めるように構成されている。
(もっと読む)
フィードバック制御装置
【課題】 それほど構成を複雑化することなく被制御系のバージョンを判断することのできるフィードバック制御装置の提供。
【解決手段】 新バージョンの高圧電源回路111は、抵抗器27,28の間に抵抗器121を介して3.3Vの直流電源を接続した点において旧バージョンの高圧電源回路と異なり、他はほぼ同様に構成されている。このため、旧バージョンの高圧電源回路では、転写バイアス電流TR.CCが0μAであるときにはフィードバック電圧Vfも0Vであるのに対して、新バージョンの高圧電源回路111では、抵抗器121,28を介して通電される電流によりVf=0.4Vとなる。そこで、PWMDUTY100%のPWM信号をASIC3のPWMポートから出力し、転写バイアス電流TR.CCを0μAとしたときのフィードバック電圧Vfに基づいてバージョンを判断する。
(もっと読む)
多関節型ロボットの制御方法
【課題】従来のオブザーバ制御演算装置では、ロボット自身の姿勢やアームに取り付ける負荷の変化に対応して制御性能の劣化を防ぐには、負荷イナーシャ、状態オブザーバ、状態FBのパラメータのリアルタイムでの演算が必要であり、演算処理の負荷が非常に多くなる。
【解決手段】アームに取り付けられる複数の負荷に応じて予め調整されたパラメータを持つ複数の状態オブザーバと状態FBの演算を同時に行い、アームに取り付けられる負荷情報に基づいてそれぞれの状態FB値のモータ電流指令への加算量を調整する際に、各姿勢におけるアーム回転半径の最大値に対する2乗比の1次関数として定義する姿勢ゲインを乗じることにより、リアルタイムで負荷イナーシャ、状態オブザーバ、状態FBのパラメータ演算を行う必要はなく、ロボットの姿勢変化に応じた振動抑制効果が得られる状態で演算時間を削減できる。
(もっと読む)
2自由度ディジタル制御装置
【課題】 1つの目標指令のみを与えるローコスト指令装置を用いて、制御出力を目標指令にオーバーシュートおよび定常偏差がなく高速高精度に追従させることができる2自由度ディジタル制御装置を提供する。
【解決手段】 目標指令を入力しフィードフォワード操作量を出力するフィードフォワード補償器13と、目標指令を入力しフィードフォワード指令を出力する前置補償器10と、フィードフォワード指令と制御出力との偏差を入力しフィードバック操作量を出力するフィードバック補償器15と、フィードフォワード操作量とフィードバック操作量との和を入力し制御対象18に操作量を出力するホールダ17と、制御対象18の出力をサンプリングして制御出力を出力するサンプラ19と、を備えた2自由度ディジタル制御装置において、前置補償器10は、前置遅れ器11と前置フィルタ12とで構成する。
(もっと読む)
電動機の制御装置
【課題】装置の共振周波数の大きな変化による短時間発振を抑制することができるモータ制御装置を提供することを目的とする。
【解決手段】ノッチ周波数とノッチ幅を含むノッチフィルタパラメータの変更が可能であるノッチフィルタと、振動周波数を推定する振動周波数推定手段を有し、ノッチフィルタのノッチ周波数と推定された振動周波数との間の周波数を前記ノッチフィルタの新たなノッチ周波数として設定するとともに、元のノッチ周波数成分と推定された周波数成分が減衰するようノッチ幅を変更するノッチフィルタパラメータ設定手段を有する。
(もっと読む)
制御システムの構築方法及び制御システム
【課題】逆モデルに依らず、安定したフィードフォワード制御系を構築することが可能な技術を提供する。
【解決手段】本発明では、伝達関数P(z-1)を、遅延演算子z-1の多項式N(z-1),D(z-1)を用いて、P(z-1)=N(z-1)/D(z-1)で表現可能な制御対象を制御するに際し、次の方法で、制御システムを構築する。即ち、規範モデルM(z-1)を、伝達関数P(z-1)の分子N(z-1)を含む関数M(z-1)=N(z-1)・L(z-1)に設定して、所望の規範モデルM(z-1)に対応する関数L(z-1)を導出する。そして、フィードフォワード操作量uff(i)を、関数L(z-1)及び伝達関数P(z-1)の分母D(z-1)を含む式Uff(i)=D・L・r(i)に従って、算出するように、フィードフォワード制御系を構築する。このようにして、本発明では、逆モデルP-1を用いずに、フィードフォワード制御系を実現する。
(もっと読む)
プロセスシミュレーション装置
【課題】 短時間で任意の入出力関係を定義できると共に、接続するコントローラに対して汎用性備えるプロセスシミュレーション装置を実現する。
【解決手段】 コントローラからの操作量を入力し、プロセスの応答を模擬する制御量を前記コントローラに出力するプロセスシミュレーション装置において、
前記操作量を入力ポートに読み込み、これに対して所定の演算を実行した結果を制御量として出力ポートに書き込むデータ連携手段を備える。
(もっと読む)
サーボ制御装置とその制御方法
【課題】 モータのフィードバック速度にかかわらず外乱抑制性が高く滑らかな制御ができるサーボ制御装置とその制御方法を提供する。
【解決手段】 速度制御器(1)、電力変換器(2)、オブザーバ(5)、第1フィルタ(6)、第2フィルタ(7)、加算器(8)を備え、オブザーバから出力される推定速度Vfb^を第1フィルタ(6)でフィルタ処理した信号と速度検出値Vfbを第2フィルタ(7)でフィルタ処理した信号とを加算した信号を速度制御器(1)で使用する速度フィードバックVfb2として使用するようにした。
(もっと読む)
振動低減装置のコントローラの設計方法、振動低減装置のコントローラ及び振動低減装置
【課題】騒音抑制や速応性などに関する制御性能およびロバスト安定性の両面を考慮して複数の周波数帯域の振動の低減をそれぞれ対応して制御する複数のコントローラの設計方法等を提供することにある。
【解決手段】複数のコントローラのうち1つのコントローラについて、1つのコントローラを除く他の1以上のコントローラでフィードバックした状態で1つのコントローラの制御対象からモデル誤差を求め、当該モデル誤差を用いてロバスト安定性を満たす重み関数を求めて1つのコントローラを設計する。これにより、周波数帯域を分割して各帯域のモデルを低次元で同定することができ、モデル化のための計算時間の短縮、モデル化精度の向上を達成することができる。各帯域用コントローラは、それぞれの帯域に対応した低次元モデルから設計されるため、制御系設計の高効率化を図ることができると同時に設計されるコントローラも低次元で構成することができる。
(もっと読む)
自動適合装置及び方法
【課題】効率的且つ効果的に適合値を決定する。
【解決手段】自動適合システム100において、次善最適解決定処理が実行される。当該処理においては、パラメータx1及びx2に応じて変化する目的関数F1及び制約関数F2相互間のパレート解が、適合範囲内のパラメータ値について導出され、目的関数F1及び制約関数F2により規定される座標平面上で、パレート解に対応する座標点を繋げて得られるパレート解曲線PRF_Pが設定される。一方、当該適合範囲でパラメータを変化させた場合の、目的関数F1及び制約関数F2各々における最大値と最小値との偏差DOPT及びDLIMに基づいて規定される傾きkに、更にエンジン200の定常比率Aに応じて定まる補正係数αを乗じてなる傾きk’の直線が設定される。この直線とパレート解曲線との接点に対応するパレート解が、次善的な最適解として抽出される。
(もっと読む)
温度調節器
【課題】コントローラのパラメータの調整が容易であって、温度の均一制御を図ることができる温度調節器を提供する。
【解決手段】制御対象16の検出温度の差を、温度制御手段の出力側に、フィードバックするフィードバック手段としての干渉化器18を設け、検出温度の差に対応する制御対象16の温度差に起因する高温側から低温側への熱流の流れと同じ方向に、高温側に対応する温度制御手段と低温側に対応する温度制御手段との間で、操作量の流れが生じるようにフィードバックし、これによって、干渉を強めて制御対象16の温度の均一化を促進するようにしている。
(もっと読む)
シミュレータ及び記憶媒体及びプログラム及び制御装置及びシミュレータの制御方法
【課題】本発明は制御装置を代えずに制御システムを高機能化及び高速処理化することを課題とする。
【解決手段】シミュレータ10には、シーケンサ20と、軌道生成器30と、理想フィードバック制御器40と、ホルダ50と、実システムモデル60とがコンピュータ上の仮想機器として形成される。理想フィードバック制御器40は、シミュレータ10上において、制御対象モデル90の状態量と、動作指令パターンから実システムモデル60への入力を決定し、フィードバックループを策定すると共に、実システムモデル60への入力を時系列データとしてメモリ15に出力する。ホルダ50は、シミュレータ10上において、実システム110上のシーケンサ112のサーボサイクル毎に演算結果によって値が更新され、次のサーボサイクルまで値を保持する。ホルダ50で生成される理想制御入力の更新周期は、シーケンサ112と同じサーボサイクルになる。
(もっと読む)
PID制御装置及びPID制御方法
【課題】PID制御対象を制御するためのPIDパラメータを決定して、該PIDパラメータを用いて、上記制御対象を制御する場合に、予測モデルを構築しないで最適なPIDパラメータを容易に決定できるようにして、制御の信頼性を向上させる。
【解決手段】時刻tの時点での制御対象への入力、該制御対象からの出力及び目標値をそれぞれu(t)、y(t)及びr(t)とし、上記入力の差分に対する重み係数をλとし、むだ時間をkとし、差分演算子をΔとしたとき、
φ(t+k)=y(t+k)−r(t)+λΔu(t)
で表される一般化出力φ(t+k)が小さくなるように、上記PIDパラメータを決定する。
(もっと読む)
目標軌道生成装置及び目標軌道生成方法
【課題】ワークの位置決め制御の時間短縮を図る。
【解決手段】ワークの位置制御系に対して、最終的に位置決めすべき指令位置が位置決め動作開始後に変更された際に、指令位置予測器6によって次の時刻の指令位置を予測し、その予測した指令位置とワークの現在位置との差(目標位置軌道)に対応した目標加速度軌道を生成し、その目標加速度軌道から目標速度軌道及び目標位置軌道を生成して、ワークに対する位置決め制御を行うので、短時間に効率良く位置決め制御を終了させることができる。
(もっと読む)
サーボ制御装置とその速度追従制御方法
【課題】 ノイズの影響を許容できる範囲に抑え、更に、外乱や負荷変動などの悪影響を抑制し、ロバスト安定性を保証し、指令に対するロバストかつ高性能な追従制御を実現することができるサーボ制御装置を提供する。
【解決手段】 速度指令ω*に基づいてトルク指令基本信号T0*を算出するPI制御部2を備え、電動機および負荷機械を駆動制御するサーボ制御装置において、前記負荷機械のイナーシャが大きい場合と前記負荷機械のイナーシャが小さい場合とを比較して、前記モータ速度の応答をほぼ一致させる手段5,6を備えた。
(もっと読む)
段ボールシート製造装置の制御システム
【課題】製造された段ボールシートの反り、接着不良を高精度に抑制すること。
【解決手段】段ボールシート製造装置の制御システム100は、FF/FB制御装置101と、PIDコントローラ102と、知識データベース103とを含んでいる。FF/FB制御装置101は、知識データベース103によって動特性と静特性との補償分の判別を行い、FF制御とFB制御とを切り替える。PIDコントローラ102は、2自由度のPIDアルゴリズムに基づいており、知識データベース103からの情報に基づいてフィードバックゲインが調整される。
(もっと読む)
1 - 20 / 56
[ Back to top ]