
Fターム[5H004JA22]の内容
フィードバック制御一般 (10,654) | 設定部 (547) | 複数制御量の設定 (33) | 同種の制御量に対する設定 (17)
Fターム[5H004JA22]に分類される特許
1 - 17 / 17
プラント制御装置、プラント制御方法およびプログラム
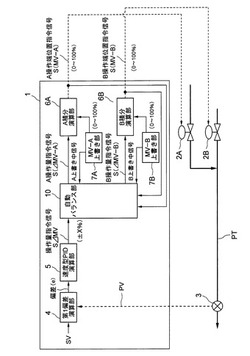
【課題】複数の操作端毎の位置指令信号値の間に差が生じた場合でも、速度型PID演算部からの自動制御を継続しつつ、複数の操作端毎の位置指令信号値間の偏差を自動的に解消する。
【解決手段】速度型PID演算手段と複数の積分演算手段と複数の上書き手段と自動バランス手段とを持つ。前記速度型PID演算手段は、偏差信号からPID演算を行い、偏差に応じた速度型の操作量指令信号を生成する。前記積分演算手段は、前記操作量指令信号に基づいて各操作端用の規定された操作端位置指令信号を生成する。前記複数の上書き手段は、各操作端用の追加の位置指令信号を生成し、対応する積分演算手段に上書き処理を行って操作端位置指令信号を新たに規定する。前記自動バランス手段は、前記規定された操作端位置指令信号間の偏差を算出し、その算出結果に基づいて前記操作量指令信号を補正し、補正された操作量指令信号を前記積分演算手段に与える。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法

【課題】定常状態において電力使用量が一定値を超えないように、かつ外乱抑制特性が可能な限り損なわれないようにする。
【解決手段】電力総和抑制制御装置は、割当総電力の情報を受信する割当総電力入力部(10)と、総電力実測値を取得する総電力実測値入力部(11)と、総電力実測値が割当総電力より大きい場合に補正係数を小さくする第1の補正係数更新部(12)と、使用電力が最大状態に到達していると見なされる状況で総電力実測値が割当総電力より小さい場合に補正係数を大きくする第2の補正係数更新部(13)と、各制御ループの電力余裕が公平な状態に近づくように操作量出力上限値を算出する電力抑制手段(14〜20)と、操作量出力上限値に補正係数を乗じて補正する出力上限値補正部21と、制御ループ毎に設けられ、操作量を算出して操作量の上限処理を実行する制御部(22−i)を備える。
(もっと読む)
制御装置および方法
【課題】設定値変更時において制御手段とそれ以外の手段との間で行われる信号伝達の頻度を減らしつつ、各制御ループの制御量が設定値に達する時間がほぼ同じになるようにする。
【解決手段】制御装置は、複数の制御ループLiの設定値SPiが変更されたとき、各制御ループLiの操作量出力上限値OHiを規定出力上限値MOiにしたときに各制御ループLiの制御量PViが設定値SPiまで達するのに必要な昇温時間TLを推定する昇温時間推定部1と、昇温時間TLで制御量PViが設定値SPiまで達するのに必要な操作量出力MUiを制御ループLi毎に推定する必要出力推定部2と、操作量出力MUiを各制御ループLiの操作量出力上限値OHiとして一時的に設定する出力上限設定部3と、制御ループLi毎に設けられた制御部5−iとから構成される。
(もっと読む)
省エネルギー余裕算出装置、省エネルギー総余裕算出装置および方法
【課題】マルチループ温度制御系において最遅同調制御を適用することを想定した省エネルギー余裕分を概算で見積もる。
【解決手段】省エネルギー余裕算出装置は、昇温前の操作量MVLを取得する低温時操作量取得部1と、昇温完了後の温度で待機中の操作量MVHを取得する高温時操作量取得部2と、最遅制御ループ以外の制御ループの昇温完了から最遅制御ループの昇温完了までの、最遅制御ループ以外の制御ループの待機時間THを計測する待機時間計測部3と、ヒータ容量に関する情報HPを記憶するヒータ容量記憶部4と、待機時間THとヒータ容量HPと操作量MVHと操作量MVLとから最遅制御ループ以外の制御ループの省エネルギー余裕ESを算出する省エネルギー余裕算出部5とを備えている。
(もっと読む)
自走式移動体の制御システム
【課題】実時間制御において、複合的な目的を達成するとともに作業時間を短縮することが可能な自走式移動体の制御システムを提供する。
【解決手段】自走式掃除機100の制御システム1は、変位可能な本体110と、本体110に取り付けられ、本体110に対して変位可能なアーム120と、本体110を駆動するための車輪駆動用モータユニット133と、アーム120を駆動するための第1のサーボ127と第2のサーボ128と、コンピュータ200とを備え、コンピュータ200は、本体110の変位に関する因子とアーム120の変位に関する因子との両方の因子に基づいて本体110の挙動とアーム120の挙動とを評価する評価関数を利用して、本体110の挙動とアーム120の挙動とを制御するように車輪駆動用モータユニット133と第1のサーボ127と第2のサーボ128とを最適制御する。
(もっと読む)
制御装置および制御方法
【課題】操作量総和を操作量総和下限値以上の値に維持しつつ、制御の限界を改善する。
【解決手段】制御装置は、各制御ループの制御量PV1,PV2と設定値SP1,SP2との偏差に基づいて操作量MV1,MV2を算出するPID演算部22−1,22−2と、操作量MV1とMV2の総和MV_allを算出する操作量総和算出部31−1,31−2と、複数のゾーンZ1,Z2のうち予め規定されたゾーンの制御の整定状態を検出したときに、整定時の各ゾーンZ1,Z2の操作量MV1,MV2と整定時の操作量総和MV_allとの比に応じて、予め規定された操作量総和下限値OL_allを各ゾーンに配分し、この配分した値を各ゾーンの操作量下限値OL1,OL2とする下限値配分部32−1,32−2とを備える。
(もっと読む)
制御装置および制御方法
【課題】操作量総和を操作量総和下限値以上の値に維持しつつ、制御の限界を改善する。
【解決手段】制御装置は、各制御ループの制御量PV1,PV2と設定値SP1,SP2との偏差に基づいて操作量MV1,MV2を算出するPID演算部22−1,22−2と、操作量MV1とMV2の総和MV_allを算出する操作量総和算出部31−1,31−2と、操作量総和MV_allが予め規定された操作量総和下限値に到達してこの下限値以下になったときに、操作量MV1,MV2を、到達が生じた時点の操作量MV1,MV2に基づく値に固定する操作量固定部32−1,32−2とを備える。
(もっと読む)
制御装置および制御方法
【課題】制御量を設定値に近づける特性を完全に犠牲にしてしまうことは避けつつ、過渡状態、整定状態に関係なくエネルギー消費量を抑制する。
【解決手段】制御装置は、各制御ループの制御量PV1,PV2と設定値SP1,SP2との偏差に基づいて操作量MV1,MV2を算出するPID演算部22−1,22−2と、操作量MV1とMV2との操作量差δMVを算出する操作量差算出部31−1,31−2と、操作量差δMVに基づいて設定値SP1,SP2に対するSP補正量ΔSP1,ΔSP2を算出するSP補正量算出部32−1,32−2とを備える。SP補正量算出部32−1,32−2は、操作量MV1のエネルギー効率が悪い場合にエネルギー効率が良い方向へ変化するようにSP補正量ΔSP1,ΔSP2を算出する。
(もっと読む)
制御方法、温度制御方法、制御装置および温度調節器
【課題】 複数チャンネルを関連付けた制御において、特性が異なるチャンネルが存在する場合に、制御性能が悪化するのを回避する。
【解決手段】複数の各チャンネルのステップ応答波形を計測し(ステップn1)、複数の各チャンネルの最大傾きRの内の最大値を抽出し(ステップn2)、最大値の1/2を閾値として、複数のチャンネルを、最大傾きRでグループ分けできるか否か判定し(ステップn3)、グループ分けできるときには、複数チャンネルの内に特性の異なるチャンネルが存在するとして、最大傾きRが小さいグループのチャンネルの検出温度の平均温度を代表温度に変換し(ステップn4,5)、傾斜温度制御を行う。
(もっと読む)
制御方法、温度制御方法、制御装置および温度調節器
【課題】ユーザの要求に応じて、高精度な均一制御と通常の制御とを可能にする。
【解決手段】制御対象2からの複数の検出温度を変換するモード変換器3の変換用の行列Gmと、PID制御部4−1〜4−3からの操作量を配分する前置補償器5の配分比の行列Gcとを切替えることにより、複数チャンネルに対応する複数の検出温度を、傾斜温度および代表温度に変換し、それらを制御量として複数チャンネルを関連付けて制御する第1の制御と、複数の検出温度をそのまま制御量としてチャンネル毎に制御する第2の制御とを、制御中に切替え可能としている。
(もっと読む)
制御方法、温度制御方法、補正装置、温度調節器、およびプログラム
【課題】操作量が飽和するのを回避して、被処理物を、所望の状態で処理するための調整作業を容易に行えるようにする。
【解決手段】目標温度SPを変化させたときの操作量MV、ウェハの温度WAF、および、熱板の検出温度PVの各変化に基づいて、目標温度SPと操作量MVとの関係を示す第1の行列、および、ウェハの温度WAFと目標温度SPとの関係を示す第2の行列を取得し、第1,第2の行列を用いて、操作量MVを制限した範囲内で、ウェハの面内の温度のばらつきを最小化する目標温度SPの補正値を求めるようにしている。
(もっと読む)
制御装置、温度調節器およびゲイン調整装置
【課題】傾斜温度(温度差)を用いた温度制御などにおいて、干渉の強い制御対象であっても、ハンチング等が生じないようにすることを目的とする。
【解決手段】温度差である傾斜温度に基づいて、操作量を演算する傾斜モモードのコントローラCgと、平均温度に基づいて、操作量を演算する平均モードのコントローラCaとを備える温度調節器において、傾斜温度に基づいて、干渉を打ち消すように、傾斜モードおよび平均モードの各コントローラCg,Caの操作量を調整する傾斜モードおよび平均モードの非干渉化器Fg,Faを設けている。
(もっと読む)
制御装置
【課題】制御量以外の参照パラメータの検出結果の信頼性の低下などに起因して、制御誤差が一時的に増大するような条件下でも、制御誤差を適切かつ迅速に補償でき、それにより、高い制御精度を確保できる制御装置を提供する。
【解決手段】制御装置1の空燃比コントローラ100は、連結重み関数Wcpiを空燃比誤差推定値Eafなどに乗算して、修正誤差Weafiを算出し、この値Weafiが値0になるように、値Dlift_bsiを算出し、連結重み関数Wcpiを値Dlift_bsiなどに乗算して、値Dlift_lsiを算出し、この値Dlift_lsiの総和である値Dliftを値Liftinに加算することにより、値Liftin_modを算出し、この値Liftin_modに応じて、空燃比をフィードフォワード制御するための第1推定吸気量Gcyl_vtを算出し、空燃比をフィードバック制御するための空燃比補正係数KAFを算出し、これらに応じて燃料噴射量TOUTを算出する。
(もっと読む)
プロセスの制御装置および制御方法
【課題】複数の制御因子を有するプロセスの、プロセス条件を一定範囲に制御するための制御因子のうち、逆方向の効果をもたらす少なくとも2つの制御因子の制御が切り替わる境界におけるハンチングによる不必要なロスを低減でき、かつ、不感帯による制御の不安定を回避できるという優れたプロセスの制御装置および制御方法を提供する。
【解決手段】(1)プロセス条件を一定範囲に制御するための制御因子のうち、逆方向の効果をもたらす少なくとも2つの制御因子に対して独立して制御する手段を含むことを特徴とするプロセス制御装置。(2)プロセス条件を一定範囲に制御するための制御因子のうち、逆方向の効果をもたらす少なくとも2つの制御因子に対して独立して制御する手段を設置して、一定の制御範囲内で少なくとも2個以上の設定値を設定し、制御することを特徴とするプロセス制御方法。
(もっと読む)
温度制御方法、温度制御装置およびループコントローラ
【課題】制御点数が増えた場合にも、高精度な傾斜温度制御を可能とする。
【解決手段】傾斜温度制御を行なう温度制御ブロック24H,24L−1,24L−2を階層化し、下層の温度制御ブロック24L−1,24L−2の入力温度モード変換ブロックからの平均温度GPV1を、上層の温度制御ブロック24Hの入力温度モード変換ブロック20Hの入力温度とする一方、上層の温度制御ブロック24Hの前置補償ブロック23Hからの制御出力を、下層の温度制御ブロック24L−1,24L−2の目標温度モード変換ブロック21L−1,21L−2の目標温度とし、これによって、下層の各温度制御ブロック24L−1,24L−2毎に、個別に傾斜温度制御するのではなく、両温度制御ブロック24L−1,24L−2全体として傾斜温度制御するようにしている。
(もっと読む)
制御装置および制御方法
【課題】マルチループの状態量制御系において定常偏差の絶対値を小さくする。
【解決手段】第1の制御ループについて設定値SP1と制御量PV1との偏差Er1を算出する偏差Er1算出部3−1と、偏差Er1を入力として操作量MV1を算出するPID演算部4−1と、偏差Er1に予め設定された倍率A1を乗算する倍率A1演算部6−1と、第1の制御ループとの間に干渉が存在する第2の制御ループの設定値SP2に倍率A1演算部6−1の乗算結果を加算して補正設定値SP2xを算出する加算部7−2と、補正設定値SP2xと制御量PV2との偏差Er2を算出する偏差Er2算出部3−2と、偏差Er2を入力として操作量MV2を算出するPID演算部4−2とを備える。
(もっと読む)
目標温度加工装置およびその階層構造
【課題】汎用の温度調節器であっても、傾斜温度制御を実現できるようにする。
【解決手段】 制御対象1の検出温度を、モード変換器6で傾斜温度および平均温度に変換し、入力される目標傾斜温度および目標平均温度になるように、PID制御部8−1,8−2で操作信号を出力し、この操作信号を、前置補償器9、リミッタ10−1,10−2および補償部11−1,11−2を介して温度調節器2−1,2−2の目標温度として与え、傾斜温度制御を行なっている。
(もっと読む)
1 - 17 / 17
[ Back to top ]