
Fターム[5H004JB19]の内容
フィードバック制御一般 (10,654) | 検出部(オブザーバを含む) (399) | AD変換、DA変換されるもの (8)
Fターム[5H004JB19]に分類される特許
1 - 8 / 8
フィードバック制御装置及びフィードバック制御プログラム

【課題】スイッチング素子のON/OFF動作に起因するノイズの影響を受けない形でフィードバック制御を行えるフィードバック制御装置を提供する。
【解決手段】フィードバック制御装置は、PWM信号発生部12に対する制御内容を決定するために必要な情報を得るためにセンサ21からのアナログ信号をADコンバータ17にAD変換させる際に、スイッチング素子14のスイッチング動作を停止させる構成(遅延回路16、2入力NANDゲート13)を備える。
(もっと読む)
半導体装置および撮像装置

【課題】低コスト化を図るとともに、駆動電流制御の精度の向上を図ることが可能な半導体装置および撮像装置を提供する。
【解決手段】半導体集積回路101は、駆動電流値を示す複数ビットの駆動データのうち、最上位ビットまたは最上位ビットから連続する複数のビットである上位データに基づいて第1の駆動電流を生成し、負荷に供給する第1の駆動電流生成部21Aと、駆動データのうち、最下位ビットまたは最下位ビットから連続する複数のビットであり、かつ少なくとも駆動データのうちの上位データ以外のすべてのデータを含む下位データに基づいて第2の駆動電流を生成し、負荷に供給する第2の駆動電流生成部21Bとを備える。
(もっと読む)
サーボ装置
【課題】サーボ装置で駆動される模型飛行機の引込み脚を、停止位置に保持電流を消費せずに維持できるようにする。
【解決手段】サーボ装置10は、出力軸の目標位置信号と、サーボモータ16から得られる出力軸の現在位置信号等との誤差を増幅手段21で増幅し、PWM 波形としてモータに与え、誤差が小さくなる方向にモータを駆動する。不感帯設定手段23は、誤差がフィードバック制御によって修正すべき大きさか否かを判断する基準値を設定する。モータ停止と判断された場合、不感帯は通常の0.4 °から10°に変更される。モータが停止すると外力が加わってもサーボ装置には停止位置で外力に対する保持電流は流れず、電力の無駄な消費が抑えられる。
(もっと読む)
デジタルPID制御装置
【課題】デジタル制御化されたPID制御装置の制御動作を低振動化および低騒音化し、制御精度を向上させる。
【解決手段】デジタルPID制御装置であって、制御対象1の現在のアナログ状態量を検出する検出器2と、現在のアナログ状態量を現在のデジタル状態量に変換するAD変換器11と、制御対象1の目標のデジタル状態量と現在のデジタル状態量との差分である偏差量を入力とし、制御対象1に対するデジタル操作量を生成するデジタルPID制御手段9とを備え、デジタルPID制御手段9は、偏差量の絶対値が設定値以下の場合には偏差量を抑圧して出力する積分用不感帯部12および微分用不感帯部13のうち少なくとも一方を備え、積分用不感帯部12の出力に対するデジタル積分演算及び微分用不感帯部13の出力に対するデジタル微分演算のうち少なくとも一方の演算を実行することによりデジタル操作量を生成する。
(もっと読む)
呼吸加熱器の閉ループ制御のためのPID係数調整
【課題】流量の測定を必要とせず呼吸システム内の温度測定に依拠する信頼性のあるPIDフィードバック制御を提供すること。
【解決手段】呼吸システム(10)のために設けられる加熱器システム(16)は、PIDフィードバック制御(100)を有し、PIDフィードバック制御(100)では、ウォームアッププロセスなどの際に係数が調整され、係数は、流量または湿度レベルを直接監視することを必要とせずに、温度目標値に関する熱入力と熱出力の間の差に基づいて、加熱された水(27)のチャンバ(20)を通る気体の推定流量に対応するように調整される。目標値に関する測定された温度の挙動に基づく係数の定常状態調整もまた開示される。
(もっと読む)
ディジタル信号処理回路およびディジタル制御回路
【課題】
アナログPID制御に対応するディジタル制御を、移動平均処理等を行う第1フィルタと、低域通過処理等を行う第2フィルタ回路とを組み合わせて実現したディジタル信号処理回路およびこの処理回路を搭載したディジタル制御回路を提供する。
【解決手段】
ディジタル信号処理回路11は、ディジタル値Xを入力する移動平均回路111Aと、ディジタル値を入力し、微分処理を行う微分回路112と、移動平均回路111Aの出力と微分回路112の出力とを加算する信号を生成する加算回路113とを備え、移動平均回路111Aにおいて生じる位相の遅れを、微分回路112の出力により補償することを特徴とする。
(もっと読む)
閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置
閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置
多チャンネルフィードバックを有する閉ループ制御方法を説明する。該方法では、サンプリングレートfAで閉ループ制御変数xをサンプリングすることにより決定されるフィードバック変数r1、および、期間TSにわたる閉ループ制御変数xを平均化することにより決定される、さらなるフィードバック変数r2を、ガイド変数wとそれぞれ別々に比較する。処理において決定される制御エラーe1,e2のそれぞれを、個別閉ループ制御出力変数m1,m2をそれぞれ生成する分離されたコントローラ31,32に入力する。最後に、個別閉ループ制御出力変数m1,m2から生成される閉ループ制御出力変数mを、閉ループ制御変数xがガイド変数wを追従するように、閉ループ制御変数xを調節するために用いる。 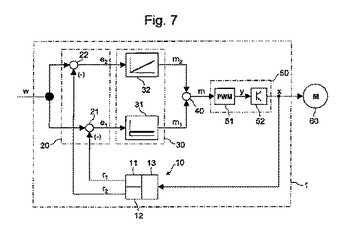 (もっと読む)
(もっと読む)
信号を復号するためのシステムおよび方法
【課題】機械の回転部の信号を復号するためのシステム(54)を提供すること。
【解決手段】システム(54)は、回転部(58)から受信された信号に基づいてN個の信号を出力するように構成されるセンサ(60)と、N個の信号から取得されたサンプリングデータの間の複数個の差から値を導出するように構成されるプロセッサ(62)とを含む。
(もっと読む)
1 - 8 / 8
[ Back to top ]