
Fターム[5H004KA01]の内容
フィードバック制御一般 (10,654) | 制御部 (412) | 速度型演算を行うもの (9)
Fターム[5H004KA01]に分類される特許
1 - 9 / 9
プラント制御装置、プラント制御方法およびプログラム
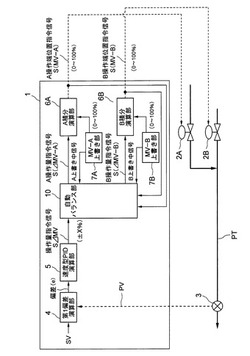
【課題】複数の操作端毎の位置指令信号値の間に差が生じた場合でも、速度型PID演算部からの自動制御を継続しつつ、複数の操作端毎の位置指令信号値間の偏差を自動的に解消する。
【解決手段】速度型PID演算手段と複数の積分演算手段と複数の上書き手段と自動バランス手段とを持つ。前記速度型PID演算手段は、偏差信号からPID演算を行い、偏差に応じた速度型の操作量指令信号を生成する。前記積分演算手段は、前記操作量指令信号に基づいて各操作端用の規定された操作端位置指令信号を生成する。前記複数の上書き手段は、各操作端用の追加の位置指令信号を生成し、対応する積分演算手段に上書き処理を行って操作端位置指令信号を新たに規定する。前記自動バランス手段は、前記規定された操作端位置指令信号間の偏差を算出し、その算出結果に基づいて前記操作量指令信号を補正し、補正された操作量指令信号を前記積分演算手段に与える。
(もっと読む)
流体制御装置

【課題】デジタル制御を採用したバルブ制御機構であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる流体制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体に関する物理量を測定する流体測定部1と、前記流体測定部で測定される物理量の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御機構4とを備えた流体制御装置100であって、前記バルブ制御機構4が、前記測定値と前記設定値の偏差に基づいてデジタル制御によって前記流体制御バルブ2の開度の操作量を演算する操作量演算部41と、アナログ制御によって位相遅れを補償する位相補償部42と、を備えた。
(もっと読む)
流体温度制御装置及び方法
【課題】流量制御弁の固体差に対応でき、オーバーシュートが良好に抑制でき、負荷外乱に十分に対応できる流体温度制御装置を提供する。
【解決手段】作動流体を熱交換器で冷却水により冷却し、ランプヒータで加熱して目標温度にする。冷却水の流量制御弁の制御では、熱交換器の非線形な冷却特性を補償するテーブルと、比例弁の非線形な流量特性を補償するテーブルとの2種類のテーブルを使用する。比例弁特性を補償するテーブルは、各パルス数位置に対して、その位置から1パルス数だけ移動したときに生じる流量の変化率を定義している。比例弁特性を補償するテーブルは、比例弁の固体差を表したパラメータを適用することで、個々の比例弁の特性に適合したものになる。過渡時には、現在温度の変化速度に応じて比例弁制御を行なう。整定時には、ランプヒータの出力を所定の適正出力範囲内に収めるように比例弁を制御する。
(もっと読む)
移動体のサーボ制御装置及びレーザ加工装置
【課題】補償効果に優れる移動体のサーボ制御装置およびレーザ加工装置を提供することおよび付加入力の演算に語長制限がある場合でも十分な補償効果を持たせる。
【解決手段】フィードバック・ループを備え、移動体を位置指令データに基づいて位置決めする移動体のディジタルサーボ制御装置において、位置指令データを受けた時刻におけるフィードバック・ループの状態量に関する伝達関数に対して、フィードバック・ループに固有の極を相殺するような零点を付加するディジタル・フィルタ10a、10b(付加入力手段)を設け、位置指令データに加えてディジタル・フィルタ10a、10bの出力をフィードバック・ループに入力して前記移動体を位置決めする。また、ディジタル・フィルタを縦続型構造とし、この構造を構成する伝達関数が複素平面上で接近した極と零点を持つようにして、演算に語長制限がある場合でも十分な補償効果を得る。
(もっと読む)
ディジタルフィードバック制御装置
【課題】
制御偏差信号から浮動小数点表示のノイズシェーピング機能付ディジタル制御偏差信号を作成する。
【解決手段】
Mは自然数でありVは正の実数でありSは実数変数であり、V[m]≡V・2^(m−1) (mはM以下の自然数)であり、制御偏差信号の標本化値を定期的にSに足し続け、時間を一定長の期間に分割し、前記各期間においてM以下の自然数mを設定し「SからV[m]を引く操作」((a)とする)と「SにV[m]を足す操作」((b)とする)を合わせて一定回数行いmを指数部とし(a)の回数から(b)の回数を引いた結果を仮数部とする浮動小数点表示の数をディジタル制御偏差信号とする。ここでSが0に近くなるように(a)を行い(b)を行い前記各期間においてmの設定を行う。S,V,V[m] (mはM以下の自然数)はそれぞれ同一単位の物理量を表す。例えば前記物理量は電荷でありSはコンデンサが保持する電荷である。
(もっと読む)
デジタル速度制御装置、デジタルモータ制御装置、紙搬送装置、デジタル速度制御方法、その方法をコンピュータに実行させるプログラム、コンピュータ読み取り可能な記録媒体、および画像形成装置
【課題】正確な制御が可能なデジタル速度制御装置を提供する。
【解決手段】デジタル速度制御装置10は、搬送ベルト301の変位量を標本化周期に対応する最小単位の変位量の整数倍によって取得する移動距離検出装置500と、標本化時刻に基づいて搬送ベルト301の目標速度を算出する目標速度算出部101と、搬送ベルト301の現在速度を変位量および標本化時刻の差分で算出する現在速度算出部102と、目標速度が所定値よりも小さいか否かを判定する目標速度判定部105と、目標速度は所定値よりも小さく、かつ、現在速度は標本化周期あたり最小単位の変位量であると算出された場合、現在速度を設定値に置き換える速度補正部106と、置き換えた設定値と目標速度との誤差を算出する速度誤差算出部103と、速度誤差に基づいて駆動モータ200を制御する調節計部104と、を備える。
(もっと読む)
プロセス制御装置
【課題】過渡応答時のオーバシュート発生の抑制及び整定時間の短縮を可能にするプロセス制御装置を得ること。
【解決手段】過渡応答時の操作量に対して演算収束用制限値を設定し、操作量演算部3にて演算された操作量が物理的に出力できる操作量であるか否かを演算収束用制限値比較部4にて演算収束用制限値と比較して判断し、操作量物理制限処理部5では、比較判断の結果、演算された操作量が演算収束用制限値を超えない場合は制御対象6に与える操作量を演算収束用制限値に置き換える一方、演算された操作量が演算収束用制限値を超える場合は制御対象6に与える操作量を物理的に出力できる操作量に制限する。つまり、なだらかな演算収束を行うための操作量が選択できるようになる。
(もっと読む)
産業用機器制御方法および産業用機器
【課題】ゲイン特性を低下させることのみに依存せず共振ピークが複数ある場合でも速度制御系を安定させた産業用機器制御方法と産業用機器を提供する。
【解決手段】本発明による産業用機器制御方法は、制御対象120を駆動させる駆動部210と、制御対象120または駆動部210の位置情報を検出する検出部220と、制御対象120または駆動部210の動作速度を規定した速度指令を出力する速度指令発生部230と、検出部220から位置情報を入力し速度指令発生部から速度指令を入力し、位置情報および速度指令に基づいて駆動部210を制御する制御処理部240とを備えた産業用機器において、制御対象120の固有振動数に起因する共振周波数における制御処理部240の入出力の位相特性を産業用機器毎に設定することによって該産業用機器を安定化する。産業用機器は本産業用機器制御方法によって調節されている。
(もっと読む)
内燃機関の制御装置
【課題】 ISCのフィードバック制御の応答性と目標回転速度への収束性(安定性)とを両方とも向上させる。
【解決手段】 ISC実行中に実エンジン回転速度の変化方向が目標回転速度に対して近付く方向か遠ざかる方向かを判定し(ステップ102)、遠ざかる方向である場合は、積分項のゲインを大きめの値に設定した第1のゲイン設定テーブルを選択し、この第1のゲイン設定テーブルを参照してその時点の実際の回転速度偏差ΔNE2に対応した積分項のゲインを算出する(ステップ103)。一方、実エンジン回転速度が目標回転速度に近付く方向に変化している場合は、前記第1のゲイン設定テーブルよりも積分項のゲインを小さい値に設定した第2のゲイン設定テーブルを選択し、この第2のゲイン設定テーブルを参照してその時点の実際の回転速度偏差ΔNE2に対応した積分項のゲインを算出する(ステップ104)。
(もっと読む)
1 - 9 / 9
[ Back to top ]