
Fターム[5H004KD32]の内容
フィードバック制御一般 (10,654) | 制御部 (227) | ニューロコントローラ (38) | ニューラルネットワークの構造 (15)
Fターム[5H004KD32]の下位に属するFターム
Fターム[5H004KD32]に分類される特許
1 - 11 / 11
ニューラルネットワーク学習装置
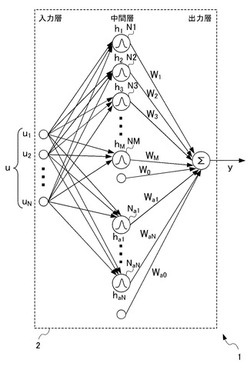
【課題】入力状態の変化前及び変化後のいずれ状態であっても、出力を精度の高いものにするニューラルネットワーク学習装置を提供すること。
【解決手段】ニューラルネットワーク学習装置1は、第一状態下に関する入力パラメータベクトルuに基づきM個の結合荷重Wi(i=1〜M)の学習を行い、学習完了したニューラルネットワークに新たにN個のニューロンNi(i=a1〜aN)を追加すると共に追加されたN個の結合荷重Wi(i=a1〜aN)の学習を行う。この追加の学習を行う際には、学習完了したM個の結合荷重Wi(i=1〜M)を固定すると共に、少なくとも第一状態と異なる第二状態下に関する入力パラメータベクトルuに基づきN個の結合荷重Wi(i=a1〜aN)の学習を行う。
(もっと読む)
入力変数選択支援装置

【課題】簡便な方法により入力候補変数から入力変数を絞り込むための指標を提示し、入力変数選択の支援を行う入力変数選択支援装置を提供する。
【解決手段】平均値が0であり標準偏差が1となるように標準化されたモデル情報データを用いて、全入力候補変数と出力変数の関係を表す複数の入出力モデル[j](j=1,・・・,JであってJは2以上の自然数)を、モデル原理を異ならせて多形式にわたり生成し、各入出力モデル[j]の各入力候補変数に対する出力変数の絶対値である感度を生成する感度生成を各入出力モデル[j]についてそれぞれ行い、各入出力モデルの感度に基づいて入力変数を選択提示する。
(もっと読む)
PID制御装置
【課題】装置特性が急激に変化したり、非線形挙動を示す装置であっても、装置を稼働させながら、高精度でPID定数を、自動調整を行う。
【解決手段】装置と、測定手段と、記憶手段と、予測モデルを作成するモデル作成手段と、予測モデルを用いて所定時間先の制御特性値を予測すると共に予測された制御特性値を用いて2以上の評価関数Imを計算する計算手段と、評価関数の2乗和ERNNを最小化するように、PID定数である比例ゲインKp、積分時間Ti、及び微分時間Tdを決定する決定手段と、PID定数に基づいて制御特性値のPID制御を行う制御手段と、を備えたことを特徴とするPID制御装置。
(もっと読む)
制御装置および方法、並びにプログラム
【課題】センサの故障に対してロバストな制御を可能にする。
【解決手段】予測部112は、学習したダイナミクスに基づいて、過去の複数のタイミングの高次元の修正データから、それより後のタイミングの高次元の入力データを予測した予測データを生成し、回帰部103は、予測データを回帰し、修正データ生成部101は、入力データと回帰された予測データとを合成して修正データを生成し、縮約部111は、高次元の修正データの次元を縮約して、入力データより低次元の、制御対象の動作を制御するための位相データを生成する。本発明は、例えばロボットやモータの制御に適用することができる。
(もっと読む)
固定型の長期及び適応型の短期メモリを有するニューラルネットワークコントローラ
【課題】ノードの相互接続の重みの変化に伴う悪影響を防止することにより、既知のコントローラの欠点を克服するリカレントニューラルネットワークを使用したコントローラの提供。
【解決手段】プラントの所望の状態及びプラントの実際の状態を表す少なくとも1つの外部入力信号と、プラントに対して制御信号として接続された出力と、を有する固定重み型リカレントニューラルネットワークを具備したプラント用のコントローラである。固定リカレントニューラルネットワークは、ノード間において固定重み型の相互接続を有するノードの組と、ノードの中の少なくとも1つからの出力を少なくとも1つのノードの入力に相互接続している少なくとも1つのフィードバック入力と、を含んでいる。これらのノードは、入力信号及びフィードバック信号の関数としてニューラルネットワークからの出力の値を総合的に判定している。
(もっと読む)
情報処理装置、情報処理方法、およびプログラム
【課題】時系列データをより正確に生成することができるようにする。
【解決手段】下位時系列生成器61のRNN71−1乃至71−Nは、センサモータ信号を学習し、その学習した結果に応じて予測したセンサモータ信号を生成する。上位時系列予測生成器62が、RNN71−1乃至71−Nが生成時に発生させる予測誤差の推定値である推定予測誤差errorPredH[N]を出力し、この推定予測誤差errorPredH[N]が、ゲート72−1乃至72−Nの開閉状態を制御するゲート信号gate[N]に変換される。合成回路73は、開閉状態が制御されたゲート72−1乃至72−Nから出力されるRNN71−1乃至71−Nの出力信号sm1(t+1)乃至smN(t+1)の総和を、時刻t+1のセンサモータ信号sm(t+1)として出力する。本発明は、例えば、ロボットなどに組み込まれる情報処理装置に適用できる。
(もっと読む)
ハイブリッド制御デバイス
ロボット用ハイブリッド制御システムは、ニューロン制御部分と非ニューロン制御部分とを含むことができる。 (もっと読む)
サーボ制御方法及びそれに適した装置
【課題】サーボ制御方法及びそれに適した装置を提供する。
【解決手段】プラントの所望のレファレンス軌跡を表す多項式及びその導関数を準備するステップと、プラント入力に対するプラント出力をサンプリングするステップと、サンプル間の相対時間を参照してレファレンス信号及びその導関数信号を発生させるステップと、発生したレファレンス信号及びその導関数信号、遅延されたプラント入力、そして遅延されたプラント出力を使用してサンプリング時点でのプラント入力を決定するステップと、を含むことを特徴とするサーボ制御方法である。これにより、レファレンス信号以外にもその導関数信号を利用して、プラントが高い精度でレファレンス軌跡を追従するよう制御できる。
(もっと読む)
予測型行動決定装置および行動決定方法
予測型行動決定装置(10)において、状態観察部(12)は環境(11)の状態を観察し、状態値s(t)を取得する。環境予測部(13)は状態値s(t)に基づいて、環境(11)の将来の状態変化を予測する。目標状態決定部(15)は状態価値記憶部(14)を参照して、行動決定のために適した将来状態を目標状態として決定する。予測に基づく行動決定部(16)は決定された目標状態を基にして、行動を決定する。  (もっと読む)
(もっと読む)
幅方向位置対応関係同定方法およびそれを用いたシート状製品製造装置
【課題】 銘柄毎に操作端と測定点の位置対応関係を測定して切り換えていたが手間がかかり、また操業中に位置対応関係がずれるとステップ応答を測定して再度位置対応関係を測定しなければならず、品質管理上問題があった。
【解決手段】 操作端の操作量をプロセスモデルに入力し、このプロセスモデルと測定プロファイルの偏差が最小になるようにプロセスモデルの位置対応関係、干渉幅、プロセスゲインを修正し、またこの位置対応関係を、操作量を出力する幅方向制御器に設定するようにした。操業中に逐次位置対応関係を最適値に修正できるので、位置対応関係がずれても制御性が悪化することがなくなり、かつ銘柄毎に位置対応関係を測定して切り換える手間がなくなる。
(もっと読む)
インテリジェント制御システムのソフト演算最適化装置
本発明は、たとえば内燃エンジンや自動車用サスペンションシステムなどのプラント制御用の制御システムに用いられる知識ベース(KB)を設計するためのソフト演算最適化装置に関する。SC最適化装置は、ファジーニューラルネットワーク(FNN)に基づくファジー推論エンジンを含む。SC最適化装置はファジー推論システム(FIS)構成を選択し、FIS構成最適化方法を選択し、教示信号を選択・生成する。ユーザは入力及び/又は出力変数、ファジー推論モデルのタイプ(たとえばマムダニ、菅野、塚本など)、メンバーシップ関数の予備タイプのうち1又は2以上を含むファジーモデルを選択する。遺伝的アルゴリズム(GA)は、言語変数パラメータと入出力学習信号を最適化するのに用いられる。GAはまた、ファジーモデル、最適言語変数パラメータ、教示信号を用いてルールベースを最適化するのに用いられる。GAは、ほぼ最適なFNNを生成する。ほぼ最適なFNNは、古典的関数ベースの最適化工程を用いて改良可能である。GAによって見い出されたFIS構成は、制御プラントの実際のプラントモデルの応答に基づく適合関数により最適化される。SC最適化装置は、従来技術によって生成されたKBよりも概して小さく、ロバストなKBを生成する。 (もっと読む)
1 - 11 / 11
[ Back to top ]