
Fターム[5H004LA02]の内容
フィードバック制御一般 (10,654) | 制御対象の特性 (738) | 高次遅れ系 (170)
Fターム[5H004LA02]に分類される特許
1 - 20 / 170
スライディングモード制御における切替線の設計装置及び設計方法
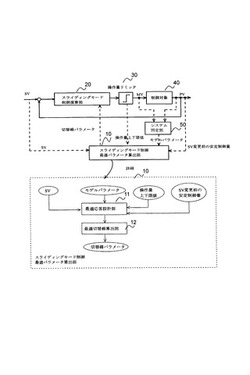
【課題】スライディングモード制御における切替線を自動算出する。
【解決手段】最適応答設計部11は、制御対象40のモデルに対して、所定の操作量飽和時間の間操作量の上限値である第1操作量を入力し、その後安定負荷率に応じた第2操作量を入力する入力波形を入力したときの、制御量の時間応答を計算する。求められた時間応答に基づいて、予め定められた評価関数の値を求める。複数の操作量飽和時間について時間応答と評価関数の値を求め、操作量飽和時間毎の評価関数の値を求める。求められた評価関数の値が、所定の条件を満足する操作量飽和時間をひとつ選択する。最適切替線算出部12は、選択された操作量飽和時間における制御量及びその微分値と、目標値とに基づき、スライディングモード制御の切替線の傾きを求める。スライディングモード制御演算部20は、求められた傾きに従い、スライディングモード制御の切替線のパラメータを求める。
(もっと読む)
外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法

【課題】設計者が試行錯誤することなく決定した伝達関数に基づく位相進み補償器と位相遅れ補償器により、共振の位相を安定化させることが可能な外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法を提供する。
【解決手段】
制御対象28に加わる外乱dを推定する外乱オブザーバ21において、外乱オブザーバ21は、制御対象28の共振成分を外乱dの一部として含んだ外乱モデルに基づいて相補感度関数のパラメータが設計されたことを特徴とする。
(もっと読む)
制御装置
【課題】より簡単な構成で目標入力に対し確実に追従可能な制御装置を提供する。
【解決手段】目標値rzと制御対象11の出力とに基づく第1操作量を制御対象11に与えるフィードバック制御器21と、目標値rzに基づく第2操作量を制御対象11に与えるフィードフォワード制御器31とを備え、j型(jは1以上の正整数)の制御系を生成する場合に、フィードフォワード制御器31が、目標値rzから前記制御対象11の出力と目標値rzの偏差までの伝達関数の分子の(j−1)次項以下の各項の係数をそれぞれゼロとするような制御要素を有している制御装置を提供する。
(もっと読む)
モータ制御装置
【課題】 指令のN階微分値を矩形波とするとともに、その矩形波をN階積分して負荷位置指令とし、制御対象の加速度が制限値を超えないようにした上で、位置決め時間を可能な限り短縮することができるモータ制御装置を提供する。
【解決手段】 制御対象のパラメータに基づく振幅および時間幅を有する矩形波信号PSを生成して出力する矩形波生成部と、矩形波信号PSをN階積分し負荷位置指令信号XLrefを演算して出力するN階積分演算部と、負荷位置指令信号XLrefに基づいて位置指令信号Xrefを生成して出力する最適指令生成部3と、位置指令信号Xrefおよびモータ位置XMに基づいてトルク指令Trefを制御演算するサーボ制御部4とを備える。
(もっと読む)
サーボの軌跡追従の位置決め調整方法及びその制御装置
【課題】 速度制御や位置制御調整後、円弧半径縮小量、最大速度と位置制御ゲインより最大速度フィードフォワードゲインを設定し、最大速度でオーバシュートしない範囲で速度フィードフォワードゲインを調整することができる、サーボ制御装置の軌跡追従の位置決め調整方法を、提供する。
【解決手段】 円弧半径縮小量と最大送り速度に基づいて位置追従遅れ量を算出する追従遅れ算出部と、前記位置追従遅れ量に基づいて最大フィードフォワードゲインを算出する最大フィードフォワードゲイン設定部と、前記追従遅れ量と最大フィードフォワードゲインに基づいて最大移動速度でフィードフォワードゲインを調整するフィードフォワードゲイン調整部と、を備えた。
(もっと読む)
自動化されたPIDコントローラの設計
本発明の実施形態は、ユーザーが、自由形式モデリング環境においてPIDコントローラなどのコントローラの対話型設計を実行できるようにするための技術、コンピュータ読み取り可能媒体、及び装置を提供する。ユーザーは、コントローラの性能に関連付けるのがユーザーには難しい場合があるコントローラのゲイン値の指定をするのではなく、典型的なユーザーになじみのなる特徴を用いてコントローラを調整することができる。 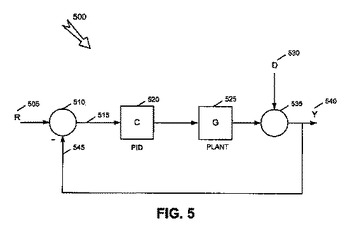 (もっと読む)
(もっと読む)
フィードバック制御装置
【課題】制御対象の状態が大きく変化する場合に、制御対象の出力検出値に含まれる揺動成分を確実に除去して、操作量の不必要な振動を回避する。
【解決手段】フィードバック制御を行う制御装置50において、制御対象14へ入力する操作量ICMDに基づいて制御対象14の出力を推定する制御対象モデル63aと、推定した出力と制御対象の検出値θcsとから算出した出力θ1から検出値θcsに含まれる検出値揺動量を算出するためのバンドパスフィルタ63c〜63eと、を備え、制御対象14の状態変化が大きくなるほど通過帯域幅を広げ、制御対象の状態変化が小さくなるほど通過帯域幅を狭める。
(もっと読む)
プラント監視制御装置、その制御方法及びその制御プログラム
【課題】制御ブロックの構造及び定数の数を予め定めた条件下において指定されたモデルの構造を受け付け、当該指定された構造の定数のみを迅速に算出することで、モデル構造の設定及び当該設定に伴う各パラメータの算出を容易に行うことが可能なプラント監視制御装置、その制御方法及び制御プログラムを提供する。
【解決手段】表示制御手段61は、ユーザにモデル構造として定数G、T1、T2を選択させるために、選択可能とする所定数の定数(G、T1、T2、・・・の8定数)が予め決められたモデル構造を設定装置を介して表示させる。ユーザにより設定装置を介して定数G、T1、T2が選択されると、定数判定手段62は、この選択された定数G、T1、T2を受け付けて伝達関数を指定することでモデルを決定する。
(もっと読む)
PIDコントローラのチューニング装置、PIDコントローラのチューニング用プログラムおよびPIDコントローラのチューニング方法
【課題】PIDコントローラが、精度良くプロセスを制御できるようにする。
【解決手段】チューニング装置100では、コントローラ10とプロセス20から構成される実際のシステムの操業データが利用されて、仮想のコントローラ51と仮想のプロセス52のモデル化が行なわれ、そして、得られたプロセス52のモデルが用いられて、コントローラ51の最適な制御パラメータが算出される。コントローラ10のチューニングに際し、算出された制御パラメータの数値を参考にすることができる。なお、チューニング装置100では、コントローラ51(制御ループ)ごとに制御性を評価し、制御性が低いと判断されたコントローラ51についてのみ、上記のモデル化や最適な制御パラメータの算出等が実行される場合がある。
(もっと読む)
PIDコントローラのチューニング装置、PIDコントローラのチューニング用プログラムおよびPIDコントローラのチューニング方法
【課題】PIDコントローラが、精度良くプロセスを制御できるようにする。
【解決手段】チューニング装置100では、コントローラ10とプロセス20から構成される実際のシステムの操業データを利用して、仮想のコントローラ51と仮想のプロセス52のモデル化を行い、そして、得られたプロセス52のモデルを用いて、コントローラ51の最適な制御パラメータを算出し、その値を参考に、実際のコントローラ10のチューニングを行う。
(もっと読む)
データ収集方法、データ収集装置、およびモデリング装置
【課題】
本発明は、操作量を表わす入力信号が入力されその入力信号に応じた応答として出力信号を出力する制御系の伝達関数モデル作成用のデータを収集するデータ収集方法等に関し、伝達関数モデルの作成に適した時系列データを収集する。
【解決手段】
入力パターンのモデルとなるモデルパターンを記憶しておき、そのモデルパターンを制御系に応じて同一のものにする、あるいは変形して入力パターンを作成し、その入力パターンに基づく入力信号とその入力信号の入力に応答して制御系から出力される出力信号を収集する。
(もっと読む)
モデリング装置
【課題】
本発明は、温度制御系の伝達関数モデルを作成するモデリング装置に関し、入力時系列データと出力時系列データを取り違えずに温度制御系の正しいモデリングを行なう。
【解決手段】
入力時系列データと出力時系列データを、分子および分母の次数がフレキシブルな伝達関数にフィッティングすることにより伝達関数モデルを作成し、作成された伝達関数モデルの分子と分母の各次数を比較し、分子の次数の方が分母の次数よりも高い場合に、入力時系列データと出力時系列データを取り違えている可能性がある旨をユーザに通知する。
(もっと読む)
モデル不一致を補償するためのチューニングを有する頑健な適応モデル予測コントローラ
MPC適応およびチューニング技法は、MPCタイプコントローラにおいて今日一般に使用される方法に比べて良好にフィードバック制御性能を統合し、プロセスモデル不一致の存在下で従来のMPC技法に比べて良好に働くMPC適応/チューニング技法をもたらす。MPCコントローラ性能は、コントローラ適応/チューニングユニットをMPCコントローラに追加することによって高められ、その適応/チューニングユニットは、最適化ルーチンを実施して、特定の量のモデル不一致またはある範囲のモデル不一致の存在下でオンラインプロセス制御中にMPCコントローラ内で使用するための、最良のまたは最適な一組のコントローラ設計および/またはチューニングパラメータを確定する。適応/チューニングユニットは、以前に確定されたプロセスモデルおよび既知のまたは予想されるプロセスモデル不一致またはプロセスモデル不一致範囲に基づいて、たとえば、MPC形態、MPCコントローラおよび観測器のいずれかまたは両方についてのペナルティ因子、およびMPCコントローラで使用するためのコントローラモデルを含む、1つまたは複数のMPCコントローラチューニングおよび設計パラメータを確定する。閉ループ適応サイクルは、予測誤差または制御誤差に対して自己相関解析を実施して、有意のプロセスモデル不一致がいつ存在するかを判定してもよく、または、所定期間にわたって、プロセスモデル不一致の増減を判定してもよい。  (もっと読む)
(もっと読む)
制御パラメータ調整方法および制御パラメータ調整プログラム
【課題】一組の試験データから直接に制御パラメータを決定できるようにする。
【解決手段】制御対象11に開ループで操作量u(t)を与えて制御する制御装置12の伝達関数C(x)を決定する制御パラメータxを、目標値r(t)に対する制御対象11の制御量y(t)の応答が参照モデルMに近づくように調整する際に、制御対象に時刻とともに変化するテスト入力信号列u1(t)を与えて制御量の時間変化であるテスト出力信号列y1(t)を採取し、誤差‖Mr(t)−PC(x)r(t)‖を変形した評価関数Jを最小にするように制御パラメータxを決定する。評価関数Jは、y1(t)=Pu1(t)に注意すると、未知の制御パラメータxで表される制御装置12の伝達関数C(x)と、既知の伝達関数M、テスト入力信号列u1(t)およびテスト出力信号列y1(t)とで表されて、J=‖Mu1(t)−C(x)y1(t)‖となる。
(もっと読む)
プラント運転支援装置
【課題】実プロセスに試験操作を与えることなくプロセス制御装置に適切な制御パラメータを求め、求めた制御パラメータを実プロセスに反映させることができるプラント運転支援装置を実現すること。
【解決手段】実プラントからオンラインで実測データを収集してその内部モデルを更新することにより高精度のシミュレーション結果を得るオンラインシミュレータと、制御性能確認部と制御パラメータ解析部を含む解析部と、これら実プラントおよび解析部に対する操作設定を行う操作設定インタフェースとを備え、
前記解析部は前記オンラインシミュレータから状態変数の値を受け取り試験操作を行ってプロセスの応答を得ることにより前記実プラントに適切な制御パラメータを求め、これら求めた制御パラメータを前記操作設定インタフェースを介して前記実プラントに反映させることを特徴とするもの。
(もっと読む)
プラント運転支援装置
【課題】動特性に影響を及ぼすパラメータであっても、プラント全体のバランスを考慮して調整できるプラント運転支援装置を実現すること。
【解決手段】オンラインシミュレータを用いたプラント運転支援装置において、実プラントの実測データに基づきオンラインでパラメータ調整を行いながらトラッキングモデルを生成するトラッキングモデル部と、このトラッキングモデルに基づき予測データを生成する予測モデル部と、生成された予測データと前記実測データを格納する予実データ記憶部とを備え、前記トラッキングモデル部は前記予実データ記憶部に格納されている予測データと実測データの差が最小になるようにパラメータを調整するとともにトラッキングモデルを更新することを特徴とするもの。
(もっと読む)
プラント運転支援システム
【課題】高精度にプラントの動作に追従するシミュレーションによって得られる推定値に基づきプラントの異常を検出すること。
【解決手段】実プラントの動作を現したプラントモデルを用いて実プラントの動作に追従するシミュレーションを行なうプラントシミュレータを用いたプラント運転支援システムにおいて、実プラントの実測値に基づき実プラントの状態をリアルタイムで再現するプラントシミュレータを用い、前記実プラントにおける実測値とプラントシミュレータによるシミュレーションによって得られた推定値とに基づき調整された調整パラメータの値があらかじめ定められた許容範囲内であるか否かを判定し、前記実プラントの運転状態の異常を検出することを特徴とするもの。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】搬送アクチュエータの振動を抑制すると共に、各駆動軸の回転動作が他の駆動軸に与える影響を低減する。
【解決手段】右搬送アクチュエータ32が伸縮動作する場合、中央制御装置10の制御部12は、縮み位置から伸び位置へ移動させるための位置指令を右搬送アクチュエータ制御装置30に出力し、現状を維持するための0°の位置指令を旋回アクチュエータ制御装置40に出力し、現状を維持するための距離0の位置指令を左搬送アクチュエータ制御装置20に出力する。右搬送アクチュエータ制御装置30は制振制御用の位置ゲインを用いて制振制御を行い、旋回アクチュエータ制御装置40は駆動軸42−Kが回転しないように維持制御を行い、左搬送アクチュエータ制御装置20は通常の位置ゲインを用いて駆動軸22−Kが回転しないように維持制御を行う。
(もっと読む)
パラメータ同定装置及びパラメータ同定プログラム
【課題】複数のパラメータの同定を適切に行う。
【解決手段】同定パラメータの変化量と表間数の変化量の関係(影響度)を調べる(ステップ11)。影響度に応じて各パラメータの影響度が所定の関係になるように補正量を求める(ステップ12)。求めた補正量により修正ゲインを補正する(ステップ13)。
(もっと読む)
制御パラメータ調整システム
【課題】制御パラメータの調整テストを適切に終了させることが可能な制御パラメータ調整システムを提供する。
【解決手段】制御パラメータ調整システムは、制御パラメータ調整装置10とテスト監視装置20とを備える。テスト監視装置20は、予め定められた終了条件を満たす場合、制御パラメータ調整装置10にテスト終了信号を送出する。制御パラメータ調整装置10は、テスト監視装置20からテスト終了信号を受信した場合、該テスト終了信号受信時に算出された制御パラメータを制御装置6に適用する。
(もっと読む)
1 - 20 / 170
[ Back to top ]