
Fターム[5H019AA03]の内容
Fターム[5H019AA03]に分類される特許
1 - 20 / 66
モータ及び電動パワーステアリング用モータ
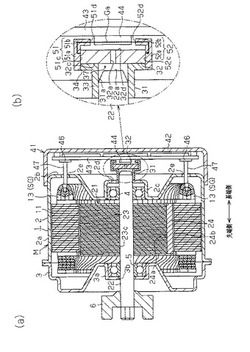
【課題】ロータの回転位置の検出精度を向上して、トルクリップルの低減、出力向上に寄与できるモータを提供する。
【解決手段】モータMの回転軸22にはホルダ31を用いてセンサマグネット32が保持されるのに対し、そのセンサマグネット32と軸方向に対向配置された磁気センサ44が回路基板43上に設けられている。そして、センサマグネット32の各磁極部の外周面には磁気誘導部51,52が当接して設けられ、各磁気誘導部51,52は、磁気センサ44と径方向に対向する位置まで延び、センサマグネット32により生じる磁束を磁気センサ44上に誘導する。
(もっと読む)
DCモータ

【課題】大きなコストアップを招くことなくコギングトルクを低減抑制し得て、費用対効果に優れたDCモータを提供する。
【解決手段】ロータ30の回転軸部32を回転自在に支持すべくステータ20の下側に取り付けられる軸受ブラケット40に所定個数の立上片部45が同一円周上に所定角度間隔をあけて一体に設けられる。各立上片部45は、隣り合う突極歯25-25の歯部25b-25b間に形成されるスリット状間隙27に挿入されて、その一側端面が片方の歯部25の一側端面に接触せしめられ、これによって、スリット状間隙27の幅βが立上片部45の幅γ分だけ実質的に狭められてβ’にされる。
(もっと読む)
正逆回転可能なDCブラシレスモータ
【課題】3相以上のブラシレスモータを正逆回転させるよりも制御が容易でかつ安価な、ブラシ及び整流子を用いることなく直流電流で正回転、逆回転の双方向に回転する単相全波整流型又は2相半波整流型DCブラシレスモータを提供する。
【解決手段】上記課題を解決するため、回転子である磁石の極位置を検出する位置センサを備え、前記位置センサの磁極検出信号の出力によりスイッチング素子のオンオフを制御し、ステータに巻かれたコイルへの通電方向を変更する単相全波整流型又は2相半波整流型DCブラシレスモータにおいて、前記位置センサから前記スイッチング素子を制御する回路へ入力する2つの磁極検出信号を入れ替えることで、前記回転子を逆回転させることを特徴とする正逆回転可能なDCブラシレスモータの構成とした。
(もっと読む)
ブラシレスモータ
【課題】ブラシレスモータにおいて高トルク化を図ろうとするとモータ全体が大型になる。
【解決手段】ブラシレスモータ1は、フレーム2を取り付けたブラケット3に軸受4を介して回転自在に取り付けられた出力軸5に円筒型のロータヨーク6を取り付け、ロータヨーク6の外側に、磁石7、ステータコア8及びステータコイル9を配置し、ロータヨーク6の内側に、磁石12、ステータコア13及びステータコイル14を配置した。外側のステータコイル9と内側のステータコイル14の各相を直列に接続し、かつ外側の磁石7の極数と、内側の磁石12の極数は同数にした。外側の磁石及び/又は内側の磁石をスキューさせた。
(もっと読む)
ブラシレスDCモータ
【課題】9スロット8極のブラシレスDCモータにおいて生じる微小なコギングトルクを安定した微小コギングトルクとさせる技術を提供することを目的とする。
【解決手段】ステータコア4の外周部にステータコイル3が巻かれた極歯10が設けられ、極歯10のロータ2の内周面に対向する位置に極歯面6が設けられている。極歯面6には、凹部5が設けられ、凹部5の円周方向の幅は、隣接する極歯10の間の隙間の円周方向の角度範囲の1.2〜3倍の角度範囲としている。また、凹部5の径方向の深さ寸法Dは永久磁石8の内径dの0.5%以上であり、極歯10を回転軸から見た角度範囲は、360度をロータ2の永久磁石8の磁極数で割った角度の0.58から0.8倍とされている。
(もっと読む)
磁極コア及び磁極コアを用いた直流電動機
【課題】磁極コア形状を工夫することにより、より簡易に、3次高調波とか5次高調波成分だけでなく、必要とする任意の高次高調波成分を重畳することにより、コギングトルクと電流トルクリップルの両者を含むトルクリップルを低減する。
【解決手段】電気角360°に相当する2磁極間の機械角Aをθとして、基本波成分に重乗した磁界強度分布を得るために重乗する3次高調波に対応する機械角Bを、θ/3に設定して、この機械角Bを、羽根部両外端のなす角度であるコア開角に一致させる。重乗する高調波次数を5以上の奇数Nとして、N次高調波に対応する機械角Cは、θ/Nに設定して、アーム部の外周面上の機械角Cの位置から周方向外方に向かうにつれて、コア軸心からの径方向距離を短くした。
(もっと読む)
ブラシレスモータ
【課題】永久磁石から発せられる磁束分布の調整を容易として、ひいてはロータに要求されるコギングトルク特性を容易に実現することのできるブラシレスモータを提供する。
【解決手段】ブラシレスモータには、複数の永久磁石14を有するロータ12bと、この複数の永久磁石14の各磁束により該ロータ12bに形成される磁界に作用する回転磁界を発生させてロータ12bを回転させるステータとが備えられる。また、このブラシレスモータには、そのステータとロータ12bとの間に、ロータ12bに巻回されることで複数の永久磁石14に固定される可撓性の調整シート16が設けられている。この調整シート16は、その基材となる可撓性を有する基材シート16Aの表面に、複数の永久磁石14の各々に対して個別にその磁束を調整可能な磁性体17が設けられている。
(もっと読む)
ブラシレスモータ用ロータ、ブラシレスモータ及び電動パワーステアリング装置、並びにブラシレスモータ用ロータの製造方法
【課題】ロータコアの外周部に取り付けられるマグネットを低コストかつ確実に固定すること。
【解決手段】ロータ10は、ロータコア6と、ロータコア6の外周部に設けられて、ロータコア6の周方向に向かって配列される複数のマグネット5と、複数のマグネット5の外周部に取り付けられるロータカバー20とを備える。ロータカバー20は、円筒形状の側部20Sと、側部20Sの両端部に設けられる規制部20E1、20E2は、ロータコアの中心軸Zrに向かって側部20Sから延出する。また、規制部20E1には、隣接するマグネット5の間に対応する部分に開口部が形成される。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】モータに共振が発生することを抑制することができるモータ制御装置及びモータ制御方法を提供する。
【解決手段】モータ20のロータ2の回転速度を検出し、検出された回転速度でモータ20に発生する周期的な振動の振動周波数を導出し、導出された振動周波数が所定の共振周波数α、βの何れかである否かを判定し、振動周波数が共振周波数α、βの何れかである場合、共振を低減させるように複数相の巻線6に印加される電圧を補正する。
(もっと読む)
アウターロータ型ブラシレスモータ
【課題】コギングトルクを低下させることを前提とし、ステータコアに流れる磁束量を多く確保することが可能なアウターロータ型ブラシレスモータを提供する。
【解決手段】ステータコア積層体に備わるティース部102Bの先端部102b1には、マグネット106に対向する側に、左右両方の円周方向にティース部の中心から機械角8度以上10度以下の位置に、それぞれ溝幅がα、溝深さがβである第1及び第2の溝102b2、102b3が形成され、隣接するティース部102b、102bの先端部102b1、102b1の間隔をγ、ステータコア積層体を形成するステータコアの板厚をtとしたとき、0<α/γ≦1.13であり、0.67≦β/t≦2.0である。
(もっと読む)
ステータ、モータ及び記録媒体駆動装置
【課題】出力トルクを低下させることなくコギングトルクの特性を向上させると共に、磁気効率の低下及びモータ性能のばらつきを防止し、さらに組み立て時の作業性の向上化、製造の容易化を図ること。
【解決手段】複数枚のステータコア10が軸線L方向に積層されたものであって、複数のステータコアが、環状部10aと、選択的にコイルが巻回される歯極部10bと、該歯極部の先端に形成された先端部10cと、をそれぞれ有し、複数のステータコアのうち互いに重ね合わされるステータコア同士が、それぞれの歯極部が周方向に並んだ関係となるように所定角度ずれた状態で積層され、複数のステータコアが、平面視された際、各ステータコアの歯極部の先端部が周方向に沿って隙間なく連続的に並んで閉ループを形成するように積層され、先端部が周方向に隣接する他の歯極部の先端部から離間して非接触とされているステータを提供する。
(もっと読む)
ブラシレス電気機械及びそれを備える装置
【課題】ブラシレス電気機械における磁場の利用効率を向上させる技術を提供する。
【解決手段】ブラシレス電気機械は、N組(Nは2以上の整数)の電磁コイル群(12)を有する第1の部材(10)と、N+1組の磁場形成部材群(32)を有し、所定の移動方向に沿って第1の部材(10)に対して相対的に移動可能な第2の部材(30)と、を備える。移動方向と垂直な方向に沿って、電磁コイル群(12)と磁場形成部材群(32)が1組ずつ交互に配置されている。
(もっと読む)
ブラシレスDCモータの回転子
【課題】ファンモータの駆動などに使用される磁石挿入穴を設けたブラシレスDCモータの回転子鉄心において、簡単な構造で、磁束漏れを防止することを目的とする。
【解決手段】外径部に円弧状磁石8を挿入する挿入穴3を設け、この挿入穴3の両端外周側に、固定子との空隙側と磁石側を連通するスリット5を設けた鉄心1と、スリット5を設けない鉄心2を、外周部で軸方向に連結して一体的に積層し、挿入穴3に円弧状磁石8を挿入して回転子11を形成する。
(もっと読む)
ブラシレス電気機械及びそれを用いた装置
【課題】十分な性能を有するインナーロータ構造のブラシレス電気機械を実現することを目的とする。
【解決手段】インナーロータ構造のブラシレス電気機械100aであって、回転軸110と、前記回転軸の周りに配置された磁石20と、前記磁石から等距離に配置された複数の電磁コイル30A、30Bとを備え、前記複数の電磁コイル30A、30Bは、前記回転軸110の回転方向に並んだコイル列であって、互いに平行なN相(Nは2以上の整数)のコイル列を形成している。
(もっと読む)
アウターロータ型ブラシレスモータ
【課題】ロータの剛性を確保しつつ、コギングトルクの低下を図り、異音の発生を抑えるアウターロータ型ブラシレスモータを提供する。
【解決手段】略円環形状に形成されたステータ本体3と、ステータ本体3の外周から半径方向外側に突出した3n(nは正の整数)個の突極4とを有するステータと、略有底円筒形状に形成されたロータヨークと、同心板状であり断面円弧形状に形成され、ロータヨークの円筒部8cの内周に取り付けられた2n個のマグネットとを有し、円筒部8cが突極4の半径方向外側に配置され、かつ、ステータに対し回転自在に配置されたロータと、突極4のそれぞれに巻装されたコイル6とを備えたアウターロータ型ブラシレスモータ1において、マグネットは、異なる極性の磁極に周方向分割着磁され、隣接する2つのマグネットは、同極の磁極が隣り合うよう配置されている。
(もっと読む)
ラジアルコアタイプのBLDCモーター
【課題】ステータの組立の生産性が優秀な一体型ステータの製造方法、これを利用したラジアルコアタイプダブルローター方式のBLDCモーター及びその製造方法を提供する。
【解決手段】回転軸と、一体型ダブルローターとを有し、外部にボビンが形成された分割コアを含む多数のコアグループから成るU、V、W相のコイル組立体の分割コアグループがそれぞれ相別に交代に環円状に配置されていて、熱硬化性樹脂を利用したインサートモールディングによって分割コアの内/外側面を除いてステータ支持体によって環円状の形状に一体に形成され、前記内部及び外部ローターの間のトレンチ型空間に一端が配置され、他端から軸方向に延長された延長部が装置のハウジングに固定される一体型ステータから構成されている。
(もっと読む)
ロータの製造方法及びロータ、並びにブラシレスモータ
【課題】 複数の着磁領域の回転位置の検出タイミングとステータの磁極の制御タイミングとの間にズレが生じることを可及的に防止することができるロータの製造方法、ロータ及びブラシレスモータを提供する。
【解決手段】 永久磁石部4には、永久磁石部4の一端から他端に亘る複数の着磁領域43が、永久磁石部4の周方向へ位置を異ならせて設けてある。着磁領域43は、永久磁石部4の位置検出センサが対向配置される端部側の第1部分41と、永久磁石部4の他端部側の第2部分42とを連設して構成されており、第2部分42はその両端位置が、永久磁石部4の周方向へ略1ピッチずれるようにスキューされている。一方、第1部分41は、永久磁石部4の中心軸に対して第2部分42の傾斜方向とは逆の方向へ傾斜するように形成されている。
(もっと読む)
ブラシレスモータ
【課題】組付精度やスキュー角のバラツキによる影響を抑えつつ、組み付け易く、ロータスキュー構造のモータよりも出力を向上し得るブラシレスモータを提供する。
【解決手段】2n個の磁極を有するロータと3n個のスロットを有するステータとを備えたブラシレスモータにて、軸方向に沿って3列に配置されたセグメントマグネットにてロータ磁極を形成する。隣接列の同極性マグネットを周方向にずれた位置に配置し、3段積のステップスキュー構造を形成する。セグメントマグネットのスキュー角θskewを電気角36°〜57°に設定する。
(もっと読む)
扁平形ブラシレスモータ
【課題】通電時のトルク性能を悪化させずにデッドポイントの回避を確実に実現できる扁平形ブラシレスモータの提供。
【解決手段】扁平形ブラシレスモータは、支軸30の周りに駆動コイル42〜45及び磁極検出素子を搭載したステータ磁性板10と、円弧角60°の扇状磁極面でN極とS極を周回方向に交互に持つ円環状マグネット50をステータ磁性板10に面対向で配置し、支軸30に対し回転自在に支持されたロータ100とを備え、ステータ磁性板10のうち円環状マグネット50に面対向する領域において、検出基準線m1及び分割線m2,m3を除く位置に孔中心C1〜C3を持つコギングトルク発生用丸孔h1〜h3を備えており、孔縁F1〜F3が円環状マグネット50の外周側縁50bよりも内側に形成されている。
(もっと読む)
ブラシレスモータ
【課題】コギングトルクとトルクリップルの両方を十分小さく抑えることができる三相式のブラシレスモータを提供する。
【解決手段】 周方向複数位置に設けた界磁コイル3に三相の正弦波が供給されて回転磁界を生じるステータ1と、ステータ1との対向面に、周方向へ交互に異なる磁極が着磁された永久磁石のロータ2とを備えるブラシレスモータにおいて、ステータ1の極数をS、ロータ2の極数をPとして、ロータ2のスキュー角度θを360度/(SとPの最小公倍数)に設定し、着磁傾斜角度αを360度/(5・P)に設定する。
(もっと読む)
1 - 20 / 66
[ Back to top ]