
Fターム[5H115QH05]の内容
車両の電気的な推進・制動 (204,712) | 起動、前後進 (222) | 起動 (213) | 坂道起動 (85)
Fターム[5H115QH05]の下位に属するFターム
上り坂 (44)
Fターム[5H115QH05]に分類される特許
1 - 20 / 41
電動車両の制御装置
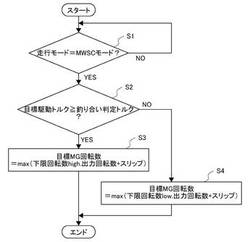
【課題】モータと駆動輪の間の摩擦係合要素をスリップ締結する時、運転者の要求通りの走行を実現することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ2と駆動輪7,7との間に介装され、モータ2と駆動輪7,7とを断接する摩擦係合要素(第2クラッチ)5をスリップ締結する時、入力回転数制御手段(図11)によって、目標駆動トルクが、車両発進が可能な釣り合い判定トルク以上では、摩擦係合要素5の入力回転数(目標MGトルク)を、目標駆動トルクが釣り合い判定トルク未満のときの入力回転数(目標MGトルク)に比べて大きな値に設定する。
(もっと読む)
車両用モータトルク制御装置

【課題】必要なクリープトルクを確保しながら、不要なクリープトルクの削減によりモータの電力消費を適切に抑制させることができる車両用モータトルク制御装置を提供する。
【解決手段】制御手段は、車速検出手段24,ブレーキ操作検出手段22の検出情報に基づいて、電動モータ2を制御してクリープトルクを発生させ、クリープトルクの発生時にブレーキ操作があればクリープトルクを所定のレベルで低下させ、クリープトルクの発生時にブレーキ操作がなければ、検出車速に基づいてクリープトルクを所定の範囲で増減させ、前記所定量は前記所定のレベル範囲の最大低下レベルよりも大きな低下レベルとする。
(もっと読む)
車両の制御装置
【課題】登坂路において車両のずり下がりを抑制する。
【解決手段】HV_ECUは、推定勾配を算出するステップ(S100)と、坂路であって(S102にてYES)、車速の絶対値がV(0)以下であると(S104にてYES)、推定勾配の変化をレートリミット処理するステップ(S106)と、ヒステリシス処理を実施するステップ(S110)と、クリープアップ係数を算出するステップ(S112)と、クリープアップトルクを算出するステップ(S114)とを含む、プログラムを実行する。
(もっと読む)
ハイブリッド車両の駆動装置
【課題】第2モータジェネレータの過熱を抑制するとともに、電力収支のバランスを保つことができるハイブリッド車両の駆動装置を提供する。
【解決手段】駆動装置1は、互いに差動回転可能な回転要素としてサンギヤS、リングギヤR、キャリアCを有し、キャリアCが内燃機関2に、サンギヤSが第1モータジェネレータに、リンギヤRがカウンタギヤ15に、それぞれ連結されている動力分割機構10と、キャリアC又はリングギヤRのいずれか一方と選択的に接続される第2モータジェネレータ6と、第2モータジェネレータ6の接続先をキャリアCとリングギヤRとの間で切り替えるクラッチ11と、を備え、第2モータジェネレータ6が接続されている一方の回転要素の回転が停止した状態で第2モータジェネレータ6に対する通電が継続する特定状態を避けるように、第2モータジェネレータ6の接続先を切り替える。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として少なくとも電動機を備えた車両に適用される車両の動力伝達制御装置において、登坂路又は降坂路にて運転者に違和感を与えることなくEV発進すること。
【解決手段】電動機出力軸の接続状態を、動力伝達系統が変速機入力軸と電動機出力軸との間で形成される「IN接続状態」、動力伝達系統が変速機出力軸と電動機出力軸との間で形成される「OUT接続状態」、並びにいずれにも動力伝達系統が形成されない「ニュートラル状態」の何れかに選択可能な切替機構が備えられる。IN又はOUT接続状態にて登坂路(降坂路)でEV発進する場合、ブレーキ操作対応制動力の付与終了(t2)からM/G駆動トルクの付与開始(t3)までの間(制動力もM/G駆動トルクも付与されない期間)に亘ってE/G駆動(回生)トルクが駆動輪に付与される。登坂路での「発進前の一時的な後進」、並びに降坂路での「発進直後の車速の急激な増大」が抑制される。
(もっと読む)
車両システム
【課題】 駆動源として内燃機関およびモータを備える車両の内燃機関を停止した停車状態からの発進時にモータのみを駆動して走行する走行モードを有する車両システムにおける前記発進時の駆動力の不足を的確かつ速やかに判定し、内燃機関を始動させることができるようにする。
【解決手段】 車両システムは、前記モータから出力された駆動力を変速機入力軸に伝達する流体クラッチと、車両状態に応じて前記モータ走行モードを選択し、前記モータの駆動を開始し、前記モータの駆動後、所定の時間以上経過しても、前記変速機の入力軸回転数が所定値を超えない場合は、前記内燃機関を始動する制御部と、を備える。
(もっと読む)
車両制御装置
【課題】車両制御装置において、エンジンと発電用回転電機と走行用回転電機の間で動力分配を行なう車両について、坂道後進を十分に行うことを可能とすることである。
【解決手段】エンジン28と、回転電機24,26と、動力分配機構30とを含む車両制御システム8における車両制御装置40は、車両の傾斜度θを取得する傾斜度取得処理部42と、シフトポジションを取得するシフトポジション取得処理部44と、蓄電装置12のSOC値を取得するSOC取得処理部46と、シフトポジションが後進レンジであるRレンジであって、傾斜度θが予め定めた傾斜度閾値θth以上のときに、充電開始SOC値と充電終了SOC値とをそれぞれ通常の場合よりも低い値に設定変更するSOC閾値変更処理部50とを含んで構成される。
(もっと読む)
ハイブリッド車両の制御装置
【課題】坂道発進時のロールバック量を低減可能なハイブリッド車両の制御装置を提供すること。
【解決手段】発進時に、第1クラッチCL1を解放してモータジェネレータMGの駆動力で発進するとともに、第1クラッチCL1を締結させて、エンジンEngをクランキングさせる発進制御を実行する統合コントローラ14を備えたハイブリッド車の制御装置であって、走行路面の勾配を検出する路面傾斜角度センサ30を備え、統合コントローラ14は、発進制御時に、勾配が大きいときには、勾配が小さなときに対しクランキングトルクが小さくなるよう第1クラッチCL1のトルク容量を制御することを特徴とするハイブリッド車の制御装置とした。
(もっと読む)
車両およびその制御方法
【課題】坂路での発進時に生じがちな車両のずり下がりをより低減する。
【解決手段】路面勾配θが基準勾配θref以上である走行路面上での停止中に運転者により発進要求がなされたときには(ステップS160)、モータMG2の回転数Nm2が基準回転数Nrefに達するまで(ステップS110)、ブレーキユニット90から転動輪である車輪39c,39dにのみ摩擦制動トルクが付与されると共にモータMG2の出力トルクが上限トルクTm2lim以下となるようにブレーキユニット90とモータMG2とが制御される(ステップS170〜S210)。
(もっと読む)
自動車のモータ制御装置
【課題】車両の動力源として搭載したモータのロック時トルク制限制御が何回も繰り返されることを防止して、車両の前進と後退が何回も繰り返されることを回避する。
【解決手段】モータ回転速度Nm がロック判定回転領域内のときにアクセル開度Accがロック予測判定開度よりも小さいか否かによってモータがロックする可能性があるか否かを事前に予測し、モータがロックする可能性があると予測された場合には、モータ指令トルクTm を増加させる際に、ロック判定トルクTmlckとモータ指令トルクTm との偏差が小さくなるほどモータ指令トルクTm の演算周期当たり(単位時間当たり)の変化量ΔTm (上昇勾配)を小さくして、できるだけモータ指令トルクTm をロック判定トルクTmlck以下に維持するように制御する。これにより、モータがロックしたと判定される頻度を少なくして、ロック時トルク制限制御が行われる頻度を少なくする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 簡単かつ安価な構成でありながら、負担の少ない操作により円滑な発進を実現することができるハイブリッド車両の制御装置を提供する。
【解決手段】 本発明に係る制御装置5は、坂道発進(或いは車両重量が大きい場合など比較的負荷の大きい状態での発進)をアクセルペダル21の踏込み情報に基づいて検出し、坂道発進であると検出された場合には、イージー坂道発進制御モードを実行し、電動発電機2の運転制御の制御目標を、従来の負担トルクから、電動発電機2の回転速度へ切り換える。
(もっと読む)
動力装置
【課題】熱機関および回転機を動力源とする場合において、回転機のトルクリップルおよびコギングトルクを低減することができ、それにより、商品性を向上させることができる動力装置を提供することを目的とする。
【解決手段】動力装置1では、第1電気モータ10が、電機子列をステータ16と、永久磁石列を有する第1ロータ14と、軟磁性体列を有する第2ロータ15などを備えており、ロータ14は前輪4に連結され、ロータ15はエンジン3に連結されている。第1電気モータ10は、3組の電動機構造において、電機子17〜19に発生する磁極と永久磁石列の磁極との間の電気角の位相が、回転方向に対して電気角2π/3ずつずれるように制御されるとともに、電機子17〜19に発生する磁極と軟磁性体列の軟磁性体コアとの間の電気角の位相が、回転方向に対して電気角π/3ずつずれるように制御される。
(もっと読む)
停車時後退防止装置
【課題】運転者がアクセル操作により登坂路停車を行おうとした場合でも、自動ブレーキにより当該登坂路停車を実行させて、自動変速機内のクラッチ寿命を延ばす。
【解決手段】登坂路走行中アクセルを釈放し、ブレーキ操作なしに車両を、車速VSPが図示のごとく低下するよう減速させ、t1に車速VS=0の停車状態となり、その後t2より、運転者が図示のアクセル開度APOによって停車状態を維持しようとした場合、アクセル対応目標駆動力tTdが勾配対応駆動力Td(θ)以下であるt3までは、ヒルホールド力ブレーキ配分率αを100%に向け一定の時間変化割合で増大させ、t3〜t4間におけるごとくtTd≧Td(θ)であれば、αを一定の時間変化割合で0%へと低下させる。よって、ヒルホールドブレーキ力hTb=tTd×α、および、クラッチ経由車輪駆動力cTd=tTd−hTbはそれぞれ図示のごときものとなり、アクセル操作により登坂路停車を行おうとした場合でも、ヒルホールドブレーキ力hTbにより登坂路停車が可能である。
(もっと読む)
回転電機制御システム及び車両駆動システム
【課題】電圧変換部の故障を検出した場合に、平滑コンデンサの保護を目的としてモータとして働く回転電機が発生するトルクを制限する回転電機制御システムにおいて、例えば発進時に所要のトルクを発生することが可能な回転電機制御システムを得る。
【解決手段】直流電源、回転電機、周波数変換部、電圧変換部、トルク制限部を備えた回転電機制御システムにおいて、電圧変換部の停止を必要とする異常を検出する異常検出部を備え、当該異常検出部が異常を検出した場合に、トルク制限部が前記回転電機の回転速度が0未満の回転速度下限閾値未満の領域で正トルクの発生を制限し、正トルクを発生する領域を回転速度下限閾値以上の領域に設定する。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】停車保持の指示に基づく停車時からの発進性能を向上させる。
【解決手段】登坂路などで停車した後にブレーキペダルを戻してもブレーキを保持する停車保持制御を解除して発進する際には(S400,S450)、実行用トルクT*の絶対値が値0を含む所定トルクTref未満の範囲内を変化するときにギヤ機構の歯打ち音などを抑制するために十分に小さく設定された第2レートΔT2より大きくなるように、且つ、通常の走行時に用いる比較的大きな第1レートΔT1以上になるように、第3レートΔT3を設定し(S490,S500)、この第3レートΔT3を用いて要求トルクTr*に向けてレート処理により実行用トルクT*を設定して(S510)、実行用トルクT*が出力されるようモータMG2を制御する。これにより、ブレーキホールドスイッチがオンとされ開始された停車保持制御を解除して発進する際の発進性能を向上させることができる。
(もっと読む)
車両およびその制御方法
【課題】停車保持の指示に基づく停車状態からの発進をより適正に行なう。
【解決手段】登坂路などで停車した後にブレーキペダルを戻してもブレーキを保持するよう指示するブレーキホールドスイッチがオンされたときには、所定の駆動力分配比(例えば前輪側40%に対して後輪側60%)を前後輪の目標制動力分配比Kbf*,Kbr*に設定し(S150)、前後輪の制動トルクの総和が保持されると共に前輪と後輪とのブレーキ油圧の比率が目標制動力分配比Kbf*,Kbr*に調整され停車状態が保持されるようブレーキアクチュエータを制御して停車保持制御を開始し(S160)、アクセル開度Accが解除判定閾値以上になったときに前後輪のブレーキ油圧を解除すると共に前後輪に要求トルクが出力されるようエンジンを制御して前後輪に対して所定の駆動力分配比による駆動トルクを出力する。これにより、前輪や後輪の引き摺りを抑制し発進する。
(もっと読む)
車両の駆動力制御装置
【課題】発進時の前後輪の駆動力を有効に活用できるようにする。
【解決手段】車両の駆動力制御装置は、車両のロールバックを検出し(ステップS502)、かつ発進操作を検出した場合(ステップS504)、前輪及び後輪の駆動力の増加を制限する(ステップS505)。
(もっと読む)
インホイールモータ制御装置
【課題】インホイールモータの機能を生かし坂道発進をスムーズに行うことのできるインホイールモータ制御装置を提供する。
【解決手段】モータ指令演算部34は、坂道発進を行うときに、各車輪に内蔵されたインホイールモータ100のうち少なくとも1輪のインホイールモータ100の電磁ロック状態に保ち、他のインホイールモータ100のトルクを上昇させる。そして、上昇させたトルクが傾斜姿勢の車両の静止状態で維持させる登坂トルクに到達したら電磁ロック状態のインホイールモータ100のロックを解放して車両の登坂走行を開始させる。
(もっと読む)
パラレル・ハイブリッド車輌の駆動制御装置
【課題】簡単な構成で運転手の要望に対応した運転パターンを容易に得ることができ、かつ、バッテリ(蓄電装置)の過放電や過充電を防止して蓄電装置寿命が縮むようなダメージを与えることのない、パラレル・ハイブリッド車輌の駆動制御装置を提供することが課題である。
【解決手段】エンジン駆動力アシストと蓄電装置充電とを切り換えるマニュアル切り換えスイッチと、蓄電装置の充電率(SOC)表示部と、力行状態において、アクセル踏み込み量に比例して設定される発電電動装置のアシストトルクを蓄電装置充電率に対応して制御するための第1のテーブルと、蓄電装置充電率に対応して発電電動装置の回生発電トルクが決定される第2のテーブルとを設け、第1のテーブルと第2のテーブルとの切換が、前記マニュアル切り換えスイッチと連動して行われるようにして、運転手の要望に対応した運転パターンが得られるようにした。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】ずり下がりが生じたときに駆動軸に出力されるトルクに不足が生じるのを抑制する。
【解決手段】車両がずり下がっていないときには(S140でNO)、トルク制限Tm1maxの計算に駆動軸に出力されるトルクの総和が値0となる式を用い、トルク制限Tm1minの計算に駆動軸に出力されるトルクの総和が要求トルクTr*となる式を用いる(S150,170)。一方、車両がずり下がっているときには(S140でYES)、トルク制限Tm1maxの計算とトルク制限Tm1minの計算のいずれにも駆動軸に出力されるトルクの総和が要求トルクTr*となる式を用いる(S160,170)。これにより、車両のずり下がりが生じたときに駆動軸に出力されるトルクに不足が生じるのを抑制することができる。
(もっと読む)
1 - 20 / 41
[ Back to top ]