
Fターム[5H115QH06]の内容
車両の電気的な推進・制動 (204,712) | 起動、前後進 (222) | 起動 (213) | 坂道起動 (85) | 上り坂 (44)
Fターム[5H115QH06]に分類される特許
1 - 20 / 44
坂道発進補助制御装置
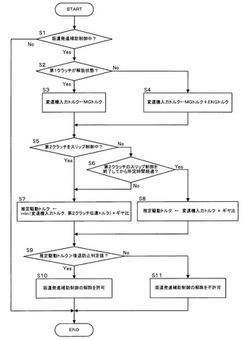
【課題】坂道発進補助制御が無用に解除されることを防止できる坂道発進補助制御装置を提供する。
【解決手段】車両が登坂路で停止状態であるときにドライバーがブレーキペダルから足を放しても車両が後退しないように制御する後退防止制御部(S1)と、駆動輪に伝達される駆動トルクを、モータージェネレーターと駆動輪との間に配置される駆動輪側クラッチが解放され始めてから再び締結されて所定時間が経過するまでは駆動輪側クラッチの伝達トルクと変速機への入力トルクとのいずれか小さいトルクに基づいて推定し、所定時間が経過した後は変速機への入力トルクに基づいて推定するトルク推定部(S7,S8)と、推定された駆動トルクが後退防止判定値よりも大きいか否かを判定する判定部(S9)と、推定された駆動トルクが後退防止判定値よりも大きいときには後退防止制御部による制御の中止を許可する後退防止制御中止部(S10)と、を備える。
(もっと読む)
車両用モータトルク制御装置

【課題】クリープトルクを発生するためのモータの電力消費を一層抑制させることができるようにした車両用モータトルク制御装置を提供する。
【解決手段】電動モータ2によりクリープトルクを発生させるものにおいて、制御手段10は、電動モータ2を制御してブレーキ操作がない限りクリープトルクを発生させ、ブレーキ操作があればクリープトルクをカットし、ブレーキ操作の解除時には、車両が後退すると車両が後退しない時よりも速やかにクリープトルクを増加させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】登坂シーンで車両がずり下がる際、バッテリの過充電を防止しつつ、回生による車両のずり下がりを抑制すること。
【解決手段】ハイブリッド車両の制御装置は、エンジン3と、発電機5,6と、バッテリ8と、駆動機10,11と、ダイレクト配電制御手段(図2)と、車両ずり下がり対応制御手段(図7)と、を備える。ダイレクト配電制御手段(図2)は、発電機5,6が発電した実発電電力を過不足なく駆動機10,11の駆動電力として消費するように、駆動要求に応じて発電電力を制御する。車両ずり下がり対応制御手段(図7)は、ダイレクト配電による発電制御中、駆動トルク指令値の符号が反転せずに駆動回転数の符号が反転したとき、駆動機10,11を回生させる制御を行うとともに、発電機5,6を力行させる制御を行う。
(もっと読む)
車両の制御装置
【課題】登坂路での車両の後退を防止する。
【解決手段】電気自動車は、駆動源としての電動モータと、電動モータに電気的に接続されたバッテリスタックとを有する。バッテリスタックの残存容量が大きいほど、絶対値が小さくなるように、バッテリスタックの充電電力の制限値WINが算出される。バッテリスタックの充電電力の絶対値が、制限値WINの絶対値以下になるように制限される。制限値WINの絶対値が小さいほど、クリープトルクの絶対値が大きくなるように電動モータが制御される。
(もっと読む)
車両の駆動制御装置
【課題】例えばハイブリッド車両等の車両において、より適切にエンジンを始動することを可能とする。
【解決手段】車両の駆動制御装置(2A)は、第1回転電機(4又はMG1)と、相互に差動回転可能な3つの分配要素を持ちこれらのうちのいずれか2つの分配要素の一方に内燃機関が他方に前記第1回転電機が夫々連結された動力分配機構(5)と、動力分配機構の残りの分配要素に連結された第2回転電機(10又はMG2)と、動力分配機構の残りの分配要素に連結された伝達部材(6)と、車両の駆動輪に動力を出力する出力部材(7)と、伝達部材から出力部材までの動力伝達経路に設けられると共に、相互に差動回転可能な複数の要素を有する変速機構(8)と、第1回転電機による内燃機関の始動の際に、第2回転電機に要求される要求出力トルクが許容上限値を超えるか否かを判定する判定手段(30)と、許容上限値を超えると判定される場合、第2回転電機の回転が機械的にロックされるギア段へ変速するように変速機構を制御する制御手段(30)とを備える。
(もっと読む)
ヒルスタートアシスト制御装置及びその制御方法
【課題】登坂路停車時において消費電力を抑えつつも車両の後退を防止することが可能なヒルスタートアシスト制御装置及びその制御方法を提供する。
【解決手段】ヒルスタートアシスト制御装置1は、登坂路停車時にブレーキペダルが戻されてもブレーキが掛かったままの状態で保持するものである。このヒルスタートアシスト制御装置1は、モータから発生するクリープトルクを低減させるクリープカット制御部25を備え、このクリープカット制御部25は、登坂路停車時にブレーキが戻された場合に、登坂路の路面勾配と戻される前のブレーキ力とに基づいて、クリープトルクの低減量を算出し、算出された低減量に基づいてクリープトルクを設定する。
(もっと読む)
車両の制御装置
【課題】複数の蓄電手段を有する構成において一方の蓄電手段の充電制限時に他方に好適に充電を行う。
【解決手段】機関と、回転電機と、機関に対し回転電機から反力トルクが付与された場合に、駆動軸に対し機関の機関トルクのうち反力トルクに対応するトルクを伝達可能な動力伝達機構と、回転電機の回生電力により充電可能な第1蓄電手段12及び第2蓄電手段13とを備えた車両1を制御する装置100は、第1蓄電手段の充電を制限する充電制限手段と、第1蓄電手段の充電が制限された場合において第2蓄電手段が充電される切り替え充電時に、第1蓄電手段の充電が制限されない場合と較べて回転電機の回転速度が低下するように且つ駆動軸のトルク低下が抑制されるように機関及び回転電機を制御する制御手段とを具備する。
(もっと読む)
車両およびその制御方法
【課題】内燃機関からのパワーを十分に用いて発進する。
【解決手段】所定勾配θref以上の登坂路で発進する際に、発進前のブレーキオンによる停車時には、エンジンから出力するパワーを増加したときにエンジンの回転数Neを上昇させるのに要するパワーのためにエンジンから出力するトルクが減少しない範囲として設定された発進前目標運転領域内でバッテリの入力制限Winに相当するパワーを出力する運転ポイントでエンジンを運転し、ブレーキオフされたときからは、エンジンの発進前目標運転領域内でのトルクの増加を伴って要求トルクTr*に基づく要求パワーPe*がエンジンから出力されると共に要求トルクTr*が駆動軸としてのリングギヤ軸に出力されるよう制御する。これにより、エンジンからのパワーを十分に用いて発進することができる。
(もっと読む)
電気自動車のモータ位置及びクリープ制御装置とその制御方法
【課題】電気自動車のモータ位置及びクリープ制御装置とその制御方法を提供する。
【解決手段】電気自動車のモータ位置及びクリープ制御装置において、車両停止からブレーキ解除後の一定時間までモータ位置制御を維持する時間を決定するモータ位置制御決定部と、モータ位置を維持するためのモータトルクを計算して、モータの位置を維持させるモータ位置制御部と、モータのクリープトルクを時間遅延を通して発生させると同時に、モータ速度を一定にする水準で制御するクリープトルク制御部とを含めて構成されることを特徴とする。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として少なくとも電動機を備えた車両に適用される車両の動力伝達制御装置において、登坂路又は降坂路にて運転者に違和感を与えることなくEV発進すること。
【解決手段】電動機出力軸の接続状態を、動力伝達系統が変速機入力軸と電動機出力軸との間で形成される「IN接続状態」、動力伝達系統が変速機出力軸と電動機出力軸との間で形成される「OUT接続状態」、並びにいずれにも動力伝達系統が形成されない「ニュートラル状態」の何れかに選択可能な切替機構が備えられる。IN又はOUT接続状態にて登坂路(降坂路)でEV発進する場合、ブレーキ操作対応制動力の付与終了(t2)からM/G駆動トルクの付与開始(t3)までの間(制動力もM/G駆動トルクも付与されない期間)に亘ってE/G駆動(回生)トルクが駆動輪に付与される。登坂路での「発進前の一時的な後進」、並びに降坂路での「発進直後の車速の急激な増大」が抑制される。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置であって、車両発進時に使用される電動機接続状態を適切に選択し得るものの提供。
【解決手段】この装置は、電動機出力軸の接続状態を、変速機の入力軸と電動機出力軸との間で動力伝達系統が形成される「IN接続状態」、及び、変速機出力軸と電動機出力軸との間で動力伝達系統が形成される「OUT接続状態」に選択可能な切替機構を備える。車両が走行状態から停止状態に移行した後において停止状態から車両が発進する場合、停止状態(路面勾配、前後加速度、路面摩擦係数、積載量等)、又は、停止状態に移行する前の走行状態(走行抵抗トルク等)に応じて、発進時の電動機接続状態が選択される。停止状態、又は停止状態に移行する前の走行状態に応じて、要求(或いは、許容)される駆動トルクの大きさに応じた適切な発進時の電動機続状態が選択され得る。
(もっと読む)
電動車両
【課題】負荷がかかった状態でも発進しやすいと共に、押し歩き時に電動モータの回転抵抗が生じない電動車両を提供する。
【解決手段】車体フレーム2に設けられたスイングアームピボット11によって揺動可能に軸支されると共に、後輪WRを回転可能に軸支するスイングアーム12と、車体側面視で後輪WRとオーバーラップするようにスイングアーム12内に配設されると共に、減速機構70を介して後輪WRに回転駆動力を供給する電動モータ50とを備える電動車両1において、電動モータ50と減速機構70との間に、電動モータ50が所定回転以上になると、回転駆動力の伝達を切断状態から接続状態に切り換える断接機構を設ける。断接機構を遠心クラッチ40とする。スイングアーム12を車幅方向左側のみの片持ち式で構成して、車幅方向左側から、遠心クラッチ40、電動モータ50、減速機構70の順に配設する。
(もっと読む)
電動車両の制駆動制御装置及び制駆動制御方法
【課題】制動フィーリングの悪化を抑制できる電動車両の制駆動制動装置及び制駆動制御方法を提供する。
【解決手段】クリープトルク発生時に制駆動トルクを制御する電動車両の制駆動制御装置において、目標クリープトルクに基づいてクリープトルクを発生させるクリープトルク発生手段20と、目標制動トルクに基づいて制動トルクを発生させる制動トルク発生手段30と、クリープトルク発生時にブレーキ操作力が増加した場合に、ブレーキ操作力が増加するほどクリープトルクを減少させ、ブレーキ操作力が増加するほど制動トルクを増加させるとともにクリープトルクの減少に応じて制動トルクの増加量を小さくし、かつ制動トルク増加分の絶対量がクリープトルク減少分の絶対量よりも大きくなるように目標クリープトルク及び目標制動トルクを制御する制御手段40と、を備える。
(もっと読む)
ハイブリッド車両
【課題】エンジントルクが車輪の駆動力と充電に必要なトルクの両方に分割される車両において、登坂時のエンジントルクからの一部充電による蓄電手段の過充電状態を抑制し、蓄電手段の劣化も防止する。
【解決手段】ナビ情報に基づき、進行先に登坂路があるか(S202)、登坂路が渋滞であるかが判定される(S204)。登坂路が渋滞の場合、バッテリECU52はバッテリ50の残容量SOCrealを推定する(S206)。HVECU70は、ナビ情報から得られた登坂路の勾配θ等をもとに、登坂走行に必要なエンジントルクを推定し、推定エンジントルクとトルクの分割比とを考慮し、バッテリ50に充電される第1の見積充電量を演算してSOC上限充電量から第2の見積充電量を減じた登坂時上限充電量SOCmax1を算出し、SOCreal>SOCmax1の場合、SOCrealを下げる制御を行う(S210)。
(もっと読む)
車両の駆動力制御装置
【課題】サイドブレーキやパーキングブレーキの操作を解除したときに、車両が後方にずり下がってしまうのを防止しつつ、モータの三相のうちの一相に電流が集中するのを防止する。
【解決手段】車両の駆動力制御装置は、インバータ9を制御する4WDコントローラ24と、サイドブレーキ51及びパーキングブレーキ52のオン及びオフ状態を検出するブレーキ操作検出部53と、電動モータ3と後輪1RL,1RRとの間を接続及び遮断する電磁クラッチ11とを備える。4WDコントローラ24は、サイドブレーキ51又はパーキングブレーキ52がオン状態であり、かつ電磁クラッチ11が接続状態にある場合、インバータ9を三相短絡にする。
(もっと読む)
車両およびその制御方法
【課題】電動機の発熱や運転者に違和感を与えるのを抑制する。
【解決手段】車速Vの絶対値が閾値Vref以下でモータの前回のトルク指令(前回Tm*)が閾値Tmref以上で温度上昇促進時間tが閾値Tmref以上のときには、路面勾配αが大きいほど小さくなる傾向で車重Mが大きいほど小さくなる傾向にトルク減少レート値RT1を設定し(S340)、モータの前回のトルク指令(前回Tm*)からトルク減少レート値RT1を減じてトルク指令Tm*を設定する(S400)。そして、設定したトルク指令Tm*でモータを駆動制御する。これにより、車両をより適正な速度で後退させてモータやモータを駆動するインバータの温度上昇を抑制することができる。
(もっと読む)
ハイブリッド駆動部を含む自動車のクリープ運転を制御するための方法と装置
本発明は、内燃エンジン(3)と、少なくとも一つの電気機械(5)と、内燃エンジン(3)と電気機械(5)との間に配置され、摩擦要素として構成された第1シフトエレメント(4)と、変速機(7)と、出力部(26)と、電気機械(5)と出力部(26)との間に配置され、摩擦要素として構成された第2シフトエレメント(6)と、を有する並列ハイブリッド駆動系(2)を備えたハイブリッド駆動部(1)を含む自動車のクリープ運転を制御するための方法および装置に関する。容易に、効果的に、かつ部品を損傷することがないような継続クリープを、構造および費用を追加することなく可能にすることを目的として、内燃エンジン(3)が駆動されている際にクリープ運転を実現するために、両方のシフトエレメント(4、6)が、滑り状態で、同時に作動され、所望のクリープトルクを生成するために必要な全摩擦動力が、両方のシフトエレメント(4、6)に、可変に、分配される。  (もっと読む)
(もっと読む)
駆動トルク伝達装置
【課題】運転者がクラッチペダルを踏込み操作した場合に、運転者に車両の動作に対する違和感を与えてしまうことを抑制することで車両のドライバビリティを向上できる駆動トルク伝達装置を提供すること。
【解決手段】車両40が登り勾配の坂路で停止している状態でクラッチペダル26が踏み込まれてエンジン12と車輪24との連結がクラッチ14によって完全に解除されると、モータ駆動制御装置18によって、モータ・ジェネレータ16が駆動されてモータトルクが発生し、このモータトルクが車輪24の車両前進方向に作用する。これにより、車輪24の車両後退方向への回転が阻止される。この結果、登り勾配の坂路に沿って車両40がずり下がることを抑制できる。したがって、運転者に車両40の動作に対する違和感を与えてしまうことを抑制できる。これにより、車両40のドライバビリティを向上できる。
(もっと読む)
ハイブリッド車両用動力伝達装置
【課題】 可及的に体格の小さい電動機を採用し、車両の小型化、軽量化、低コスト化と共に低燃費を可能にし、快適な車両走行が可能なハイブリッド車両用動力伝達装置を提供すること
【解決手段】 複数の変速段に切換え可能な歯車式有段変速機2と、歯車式有段変速機2と内燃機関1との間に配装され、内燃機関1から歯車式有段変速機2の入力部24への動力の伝達・遮断を切換えるクラッチ3と、クラッチ3の出力側24と歯車式有段変速機2の出力部31、32との間の動力伝達経路内に接続され、出力部31、32へ動力を伝達可能な電動機4と、歯車式有段変速機2の変速操作及びクラッチ3の切換操作を自動制御する制御手段5とを備えるハイブリッド車両用動力伝達装置において、歯車式有段変速機2の変速段に応じて歯車式有段変速機2の出力部31、32と電動機4との回転比が切換えられるようにした。
(もっと読む)
車両およびその制御方法
【課題】定速走行指示がなされたときにより適正な制御を行なう。
【解決手段】モータからの動力を用いて走行する電気自動車において、定速走行が指示されたときに(ステップS110)、要求トルクTd*が負のトルクであると共に車両の状態がクリープトルク出力領域にあるときには(ステップS160,S200)、モータから出力するクリープトルクを徐減させて値0にすると共に(ステップS230〜S290)駆動輪に要求トルクTd*に基づく制動力を作用させる(ステップS300,S310)。こうした制御によりモータから駆動方向のトルク(クリープトルク)を出力する一方で駆動輪に制動力を作用させるものに比して、より適正な制御を行なうことができ、エネルギ効率の向上を図ることができる。
(もっと読む)
1 - 20 / 44
[ Back to top ]