
Fターム[5H115QN28]の内容
車両の電気的な推進・制動 (204,712) | 制御、演算 (10,339) | 速度位置偏差等に対する演算要素 (1,337) | 推定要素 (439)
Fターム[5H115QN28]に分類される特許
1 - 20 / 439
車両用制御装置
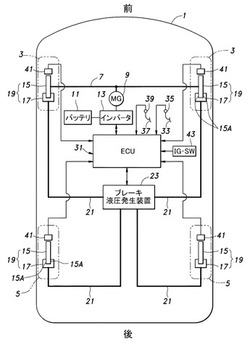
【課題】車両発進直後のブレーキ操作時には既に錆取りが行われていることを保証すること。
【解決手段】車両の主電源(イグニッションスイッチ43)オン時に、ディスクロータ15の摩擦面15Aの発錆が検出されている場合には、摩擦制動手段19が摩擦制動力を発生する制御を行う。
(もっと読む)
ハイブリッド車両の制御装置

【課題】エンジンの始動停止の頻度を低減することにより、乗員に与える違和感を低減する。
【解決手段】統合コントローラ10は、アクセル開度APOが予め設定されたエンジン停止判定値APO1以下であることをアクセルオフとして判定し、このアクセルオフの判定タイミングを起点としてエンジン停止開始タイミングを設定する。この場合、統合コントローラ10は、勾配路であると判定された場合に設定するエンジン停止開始タイミングを、勾配路でないと判定された場合に設定するエンジン停止開始タイミングよりも遅くしている。
(もっと読む)
冷却システムの診断装置
【課題】温度センサが設けられていない機器を含む複数の機器を冷却する冷却システムの異常を判定する。
【解決手段】第1インバータ210、第2インバータ220およびコンバータ200は、共通の冷却媒体によって冷却される。第1インバータ210、第2インバータ220およびコンバータ200のうち、コンバータ200に対しては温度センサが設けられていない。第2インバータ220の温度が第1しきい値を超えた場合には、第1インバータ210の温度が上昇し得るように、第1インバータ210の発熱量が増大される。第1インバータ210の温度および第2インバータ220の温度の両方が第2しきい値を超えると、冷却システム300が異常であると判定される。
(もっと読む)
情報提供システムおよび情報提供方法
【課題】本発明は、ユーザに省エネルギー運転を行わせる際に、ユーザの運転負荷を低減することが可能な情報提供システムを提供する。
【解決手段】車両の位置情報および走行情報を取得する車両情報取得手段と、車両の位置情報および走行情報に基づいて、車両の走行経路を予測する予測手段と、予測手段により予測された走行経路における道路情報を取得する道路情報取得手段と、道路情報を所定のパラメータで表し、パラメータの変化量が所定範囲内にある走行経路内の区間を、演算区間として設定する設定手段と、設定手段により設定された演算区間ごとに、車両の駆動力を制御するための制御情報を生成する生成手段と、を有することを特徴とする情報提供システム。
(もっと読む)
回転電機制御システム
【課題】キャリア周波数拡散制御によるモータ騒音の低減と、インバータ冷却器の冷却水温度の良好な推定精度とを両立させることが可能な回転電機制御システムを提供することである。
【解決手段】制御システム10は、第1モータジェネレータ11および第2モータジェネレータ12と、第1インバータ13および第2インバータ14と、インバータ冷却器15と、PWM制御モードでキャリア周波数拡散制御を実行するモータジェネレータ駆動制御装置20と、冷却水温度推定装置30と、を備え、冷却水温度推定装置30は、キャリア周波数に基づいて冷却水温度を推定する温度上昇推定部31および冷却水温度推定部32と、冷却水温度の推定更新周期をキャリア周波数拡散制御の拡散周期の整数倍に設定する推定更新周期設定部33と、を有する。
(もっと読む)
充電プラン生成装置及び充電プラン生成方法
【課題】走行ルートに必要な電力量を過不足なく充電して、バッテリの長寿命化を考慮した充電プラン生成装置及び充電プラン生成方法を提供することを目的とする。
【解決手段】バッテリ(230)に充電された電力に基づいて走行する車両(200)の車両データを受信してメモリ(110)に蓄積するステップと、蓄積された車両データに基づいて走行ルートを決定するステップと、走行ルートを走行する場合の予想使用電力量(S)を走行ルートにおける走行電力量及び回生電力量を考慮して演算するステップと、バッテリに予想使用電力量が充電されるような充電プランを生成するステップを有することを特徴とする充電プラン生成方法、及び充電プラン生成装置(100)。
(もっと読む)
充電プラン生成装置及び充電プラン生成方法
【課題】走行ルートに必要な電力量を自宅以外における充電を考慮した上で、過不足なく充電して、バッテリの長寿命化を考慮した充電プラン生成装置及び充電プラン生成方法を提供することを目的とする。
【解決手段】バッテリ(230)に充電された電力に基づいて走行する車両(200)の車両データを受信してメモリ(110)に蓄積するステップと、蓄積された車両データに基づいて走行ルートを決定するステップと、走行ルートを走行する場合の予想使用電力量(S)を走行ルートにおける途中充電量を考慮して演算するステップと、バッテリに予想使用電力量が充電されるような充電プランを生成するステップを有する充電プラン生成方法、及び充電プラン生成装置(100)。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】車輪速から車両振動を推定する装置が、車体制振制御の対象となる車体振動の全てを推定し得るものでない場合でも、当該推定し得ない車体振動を求め得る方法を提供する。
【解決手段】演算部51,52で求めた前輪速VwF、後輪速VwRに基づき、演算部53では車体の上下バウンス速度dZv(F)を求め、演算部54では車体のピッチ角速度dθp(F)を算出し、車体振動のみを表す振動成分(上下バウンス速度dZvおよびピッチ角速度dθp)を抽出。車体振動状態量補完部26は、dZvおよびdθpを微分器26a,26bにより微分して上下バウンス量Zvおよびピッチ角θpを求め、上下バウンス速度dZv(F)およびピッチ角速度dθp(F)と、上下バウンス量Zvおよびピッチ角θpとを演算部27に向かわせ、車体振動を抑制するのに必要な制駆動トルク補正量ΔTdを、車体振動とレギュレータゲインKrとの乗算値の線形和として求める。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】外乱ロバスト性に優れた高精度な推定が可能な車体振動推定装置を提供する。
【解決手段】演算部31,32で求めた前輪速VwFおよび後輪速VwRをバンドパスフィルタ33,34に通し、車体振動を表す車体共振周波数近傍振動成分fVwF,fVwRを抽出する。演算部35,36で、fVwF, fVwRから車体振動を表す前輪の前後方向変位Xtfおよび後輪の前後方向変位Xtrを求め、車体振動に起因した前軸上方車体部の上下変位および後軸上方車体部の上下変位を求め、これらから車体の上下バウンス速度dZvおよびピッチ角速度dθpを算出する。推定器25bではdZv,dθpをオブザーバ入力とし、制駆動トルクrTdから車両モデル37を用いた状態推定を行うことにより、車体の上下バウンス量fZv、上下バウンス速度dfZv、ピッチ角fθp、ピッチ角速度dfθpを推定する。
(もっと読む)
車体振動推定装置
【課題】車輪速情報を用いて車体振動を常に高精度に推定し得る車体振動推定装置を提案する。
【解決手段】演算部31,32で平均前輪速VwF=(VwFL+VwFR)/2および平均後輪速VwR=(VwRL+VwRR)/2を演算し、VwF, VwRをバンドパスフィルタ処理部33,34に通して、車体共振周波数付近の成分のみを抽出して取り出し、前輪速VwFの車体共振周波数近傍振動成分fVwFおよび後輪速VwRの車体共振周波数近傍振動成分fVwRを取得する。演算部35,36では、fVwF, fVwRから前輪の前後方向変位Xtfおよび後輪の前後方向変位Xtrを求め、前輪および後輪の前後変位および上下変位間における固有の関係を基に、Xtf, Xtrから、前軸上方部の上下変位および後軸上方部の上下変位を求め、これら車体前後の上下変位から車体振動(上下バウンス速度dZv、ピッチ角速度dθp)を推定する。
(もっと読む)
車両制御システム及び車両の駆動制御方法,列車制御装置
【課題】従来技術のディーゼル電気機関車では、エンジンの排気性能と車両の加速性能の両立が課題であった。
【解決手段】エンジンと、発電機と、コンバータと、インバータと、電動機を備える車両の制御システムであって、路線データと、前記車両の速度と、走行速度パターンのいずれか一つ以上に基づいて、電動機の出力の上昇を予測するエンジン負荷予測部を有し、前記電動機の出力上昇の予測値に基づいて電動機の出力の前にエンジン回転数を増加させるエンジン回転数補正部を有することを特徴とする列車制御システムを提供する。これにより、エンジンの排気性能と車両の加速性能の両立が可能となる。
(もっと読む)
電気車制御装置
【課題】 速度センサレス制御において、電動機が極低速で回転している場合でも、電動機を制御するためのインバータを安定して始動することのできる電気車制御装置を提供することにある。
【解決手段】 速度センサレス制御を適用した電気車制御装置10であって、速度計11から極性のない速度情報Vを受信し、運転台9から前進/後進信号SDを受信し、速度情報V及び前進/後進信号SDに基づいて、極性付き速度情報VPを演算し、極性付き速度情報VPに基づいて、インバータ1の起動時を制御する。
(もっと読む)
列車モニタ・データ伝送システムを有する列車制御装置
【課題】常に編成全体として粘着限界値に近いトルクを発生させて粘着力の有効利用を図ることができる列車制御装置を提供すること。
【解決手段】先頭電動車の電気車制御装置B1で空転あるいは滑走を最初に検知すると、そのときの接線力係数Muj(B1)を推定し、この接線力係数と、先頭車から後方の車両における粘着係数の増大量データDeltaMujと、期待粘着係数Muz_expt等をもとに、各電気車制御装置B1,Ajにおける空車時のトルク指令値上限値Taujmaxz_aを求め、列車モニタ・データ伝送システム1を介して各電気車制御装置に対して伝送する。各電気車制御装置B1,Ajでは、上記トルク指令値上限値Taujmaxz_aから実際に発生すべきトルク指令値上限値Taujmax_actを求め、これを目標値として、各電気車制御装置の制御対象範囲の電動機でトルクを制御する。
(もっと読む)
列車制御装置
【課題】自列車の位置を正確に検出できない路線においても、勾配のある区間で速度を目標速度バンド内に精度よく保って走行する。
【解決手段】本発明の一実施例に係る列車制御装置は、現在の列車速度をサンプリングして、加減速度を演算する加減速度演算部15と、前記加減速度及びノッチ特性に基づいて、走行路の勾配抵抗を求め、前記勾配抵抗及びノッチ特性を用いて所定時間後の列車速度を予測する速度予測部17と、所定時間後の列車速度が速度追従バンド内に収まるよう、ノッチ指令を決定するノッチ指令決定部18とを具備する。
(もっと読む)
駆動制御装置
【課題】変速時に電動機と駆動輪との間に設けられたクラッチが無駄に動作することを抑制可能な駆動制御装置を提供する。
【解決手段】MG3と駆動輪24との間の動力伝達経路中に設けられたMGクラッチ30を備え、内燃機関2と駆動輪24との間に設けられた変速機10の動作を制御することにより複数の変速段に変速可能な駆動装置1Aに適用される駆動制御装置において、ニュートラル位置Nを含むシフトパターンを移動可能に設けられたシフトレバー51を有するシフト操作装置50を備え、シフトレバー51がニュートラル位置Nにあっても駆動装置1Aに対して運転者から変速が要求されていると判定した場合にはMGクラッチ30が解放状態に切り替わることを禁止する。
(もっと読む)
情報提供システム
【課題】車両のバッテリの余剰電力を効率的に利用可能とする情報提供システムを提供することを課題とする。
【解決手段】少なくとも外部に放電が可能なバッテリを備える車両が走行するためのルート情報を提供する情報提供システムであって、バッテリの残充電量と地域毎の電力需要量に基づいてルート情報を設定し、そのルート情報を車両の乗員に対して提供することを特徴とし、売電を行えるルートを走行する場合の負担と売電によって得られる利益に基づいてルート情報を設定すると好適である。
(もっと読む)
共鳴型非接触給電システム
【課題】給電側と受電側との間に送電に悪影響を与える異物の存在を、専用のセンサを設けずに検出することができる共鳴型非接触給電システムを提供する。
【解決手段】共鳴型非接触給電システムは、高周波電源11から電力の供給を受ける1次側共鳴コイル13bを備えた給電側設備10と、1次側共鳴コイル13bからの電力を受電する2次側共鳴コイル21bを備えた移動体側設備20とを備えている。車両側コントローラ26は、2次電池25の電圧を検出する電圧センサ27の検出信号に基づいて充電状態を検知し、充電状態から2次電池25のインピーダンス値を推定する。また、車両側コントローラ26は、インピーダンス推定値と、現在の2次電池25のインピーダンス値との差の絶対値が閾値より大きい場合に異物が1次側共鳴コイル13bと2次側共鳴コイル21bとの間に存在すると判断する。
(もっと読む)
ハイブリッド車両の制御システム及び制御方法
【課題】ハイブリッド車両の制御システムにおいて、モータジェネレータの温度及び車両の走行状態の変化にかかわらず、車両の燃費及びドライバビリティの向上を図ることである。
【解決手段】制御システム12は、第2モータジェネレータ24の温度を検出する温度センサ40と、制御部28とを備える。制御部28は、現在の車両の走行状態を推定する手段と、記憶手段と、損失取得手段と、発電制御手段とを含む。記憶手段は、車両の走行状態と第2モータジェネレータ24の温度及びモータ損失との損失関係を記憶する。損失取得手段は、第2モータジェネレータ24の温度と、推定された現在の車両走行状態とから損失関係に基づいて、モータ損失を取得する。発電制御手段は、取得されたモータ損失を用いて第2モータジェネレータ24の発電量目標値を算出し、発電量を制御する。
(もっと読む)
駆動制御装置
【課題】例えばハイブリッド車両等に搭載される駆動制御装置において、回生によるエネルギーの回収効率を向上させる。
【解決手段】駆動制御装置は、車両(10)に搭載され、駆動軸(50)の動力を回生可能な回転電機(MG1)と、駆動軸から回転電機への動力伝達の遮断を実行可能な遮断手段(400)と、信号情報を取得する取得手段(110)と、取得手段によって取得された信号情報に基づいて、駆動軸の回転数が減少するか否かを予測する予測手段(120)と、予測手段によって回転数が減少すると予測される場合、動力伝達の遮断が解除されるように、遮断手段を制御する制御手段(130)とを備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】トーショナルダンパの特性の変化に対応した振動モデルの補正を行う。
【解決手段】 本発明のハイブリッド車両の制御装置100は、駆動力源としての内燃機関200及び電動機300と、内燃機関のクランクシャフトにトーショナルダンパ400を介して接続されたインプットシャフトを有し、内燃機関及び電動機から出力されるトルクを駆動輪FL、FRに伝達する駆動系500とを備えハイブリッド車両を制御する制御装置であって、駆動系の特性を模擬した振動モデルに基づいて算出される制振トルクを出力するように電動機を制御する。また、制御装置100は、検出手段110、120により検出されるクランクシャフト及びインプットシャフトの夫々における回転変動に基づいて、トーショナルダンパのゲインを算出し、該ゲインに基づいて、振動モデルの補正を行う。
(もっと読む)
1 - 20 / 439
[ Back to top ]