
Fターム[5H115SJ13]の内容
車両の電気的な推進・制動 (204,712) | 設定手段 (480) | 車両の内部に設定手段があるもの (322) | 減速又は停止指令のためのもの (84)
Fターム[5H115SJ13]に分類される特許
41 - 60 / 84
列車速度制御装置
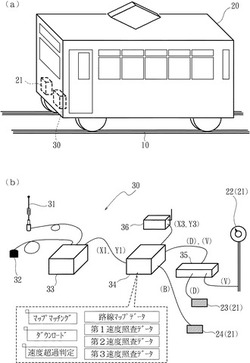
【課題】軌道添設の設備に依らず簡便に路線全域で速度制御できるうえ制限速度の一時的な変更や回復も手軽に行える列車速度制御装置を実現する。
【解決手段】衛星航法システムを利用して車両20の位置を検知する位置検知装置を改良して列車速度制御装置30にする際、車上処理装置34に、路面軌道10の路線マップデータと、路線全域の速度照査パターンからなる第1速度照査データと、停止時速度照査パターンか発車時速度照査パターンからなる第2速度照査データと、指定箇所を含む局所の速度照査パターンからなる第3速度照査データと、各速度照査パターンに速度情報Vを照査して速度超過時にはブレーキ指令を生成する速度超過判定ルーチンとを具える。
(もっと読む)
電動車両

【課題】本発明は、駆動源として軽い電動機を採用し、回生エネルギーを効率的に利用する電動車両を提供する。
【解決手段】電動車両11は、左の車輪23、右の車輪24がそれぞれのハブ86に支持され、これらのハブにそれぞれの電動機(インホイールモータ)15、16の駆動力が伝えられて走行する。ハブと電動機15、16との間に介在させている外駆動力調節装置34、36と、外駆動力調節装置に対向させて電動機に接続している内駆動力調節装置33、35と、内駆動力調節装置同士33、35を接続している駆動軸28と、を備えている。内駆動力調節装置同士33、35のクラッチを作動させることで、右の車輪24と左のインホイールモータ15を接続できる。
(もっと読む)
列車制御装置
【課題】本発明は、先行列車の遅れによる加速と減速の繰り返しを抑制し、列車の乗り心地を改善できる列車制御装置を提供するものである。
【解決手段】列車の速度を検知する速度検知手段と、列車の位置を検知する位置検知手段と、速度制限情報を受信する速度制限情報受信手段と、恒久速度制限情報を保持する路線情報データベースと列車速度が制限速度を超過したときにブレーキ指令を駆動/制動装置に出力するATC装置とを有し、前記列車制御装置では、速度制限情報受信手段によって受信した速度制限と当該位置における恒久速度制限を比較し、速度制限情報受信手段によって受信した速度制限の方が低かった場合、速度制限情報受信手段によって受信している速度制限よりも低い力行カット速度を設定し、列車速度が力行カット速度を超過している場合には力行指令をカットする手段を備えたことを特徴とする列車制御装置。
(もっと読む)
自動列車制御装置
【課題】車上装置がパターン演算を誤った場合でも、ブレーキ指令判断を誤るという致命的な動作に陥ることなく、速やかに自装置異常を検出して、安全側制御を行うことができる自動列車制御装置を得ること。
【解決手段】列車の目標停止位置を受信して目標停止位置までの路線の状況に対応した減速パタ−ンを演算し、列車の現速度が減速パターンで与えられる残走距離に応じた速度を超えるとブレーキ指令を出力して、列車の速度を減速させる自動列車制御装置において、演算した減速パターンと、予め保持された目標停止位置で列車が停止するための基準減速パターンとを比較して減速パターンの妥当性を評価し、減速パターンが妥当でない場合に列車に対してブレーキ指令を出力するとともに当該自動列車制御装置の異常を通知する手段を備える。
(もっと読む)
列車制御装置
【課題】高価な車上装置や地上設備を必要とせずに勾配や曲線を考慮した制御を行い、乗り心地を改善する。
【解決手段】自列車の列車速度を検知する速度検知手段3と、自列車が走行する路線の勾配または勾配加速度を検知する勾配検知手段4と、自列車が走行する路線上に設定されている速度制限情報、前記速度検知手段で検知される列車速度、および前記勾配検知手段で検知した勾配または勾配加速度に応じて制御指令を決定し、駆動/制動装置に出力するATC装置5を備える。
(もっと読む)
インホイールモータ駆動装置
【課題】 減速機部でのバックラッシュに伴う金属部品間に生じる過大な作用力を防ぎ、減速機部品の耐久性を向上させると共に、乗り心地を改善できるインホイールモータ駆動装置を提供する。
【解決手段】 モータBの出力軸と車両の車輪のハブとを減速機を介して連結し、上記ハブを支持する車輪用軸受を設けたインホイールモータ駆動装置とする。アクセル信号等による外部モータ指令値に応じてモータBの駆動を制御するコントローラ51を設ける。このコントローラ51に、モータBの駆動力の微分量を設定値以下に制御する駆動力変化制限手段56を設ける。コントローラ51は、モータ駆動力指令値rに応じてモータBに流す電流を生成するモータ駆動用コントローラ回路55を有する。上記駆動力変化制限手段56として、例えばローパスフィルタが用いられる。
(もっと読む)
車両およびその制御方法
【課題】運転者が車両の起動中にシフト操作を行った場合であっても、車両の起動後に再度のシフト操作をすることなく違和感なく発進できるようにすること。
【解決手段】ハイブリッド自動車20の起動中に運転者によりシフト操作が行われたときは、そのシフトポジションSPをCPU72に記憶する。そして、起動が完了したときに、走行するシフトポジションSPがRAM76に記憶されており、ブレーキポジションBPが0%でなく且つアクセル開度Accが0%であるとはいえないとき、RAM76に記憶されたシフトポジションSPとアクセル開度Accと車速Vとに基づいて設定された要求トルクTr*が出力されるようエンジンECU24やモータECU40に指令を出力すると共に、所定の初期値から時間と共に徐々に小さな値に設定される制動トルクが作用するようにブレーキ96a〜96dを制御するようブレーキECU94に指令を出力する。
(もっと読む)
車体速度推定装置及び車体速度推定方法及び制駆動力制御装置
【課題】制動力発生装置に経年変化や異常の生じた車輪が混在していても精度良く車輪速度を推定させること。
【解決手段】少なくとも1つのモータ31FL,31FR,31RL,31RRのモータトルクを少なくとも複数の車輪10FL,10FR,10RL,10RRに対して個別に付与することの可能な車輌の車体速度を車輪の情報を用いて推定させる車体速度推定手段41dが具備された車体速度推定装置において、モータ回生トルクが働いている車輪の情報のみを利用してABS制御時の車体速度の推定を行うよう車体速度推定手段41dを構成すること。
(もっと読む)
車両制御装置
【課題】ATSシステム及びATS−Pシステムを共用するシステムにおいて、車上アンテナ儀装スペースの縮減、省エネ、及び、地上電源設備を簡素化をはかりえる車両制御装置を提供すること。
【解決手段】電力波受信用アンテナ111は、電力波送信用アンテナ210から送信された電力波を受信する。地上情報波送受信用アンテナ112は、車上情報波送受信用アンテナ211との間で、情報波送受信を行う。電源部12は、電力波受信用アンテナ111で受信された電力波から、電源を生成する。送受信部13は、電源部12から供給される電源によって動作し、地上情報波送受信用アンテナ112に情報波送信信号を供給し、地上情報波送受信用アンテナ112から情報波受信信号が供給される。信号処理部20及び送受信部13は、協働して、車上情報波送受信用アンテナ211と、地上情報波送受信用アンテナ112との情報波送受信により、電力波送信用アンテナ210による電力波送信タイミングを決定する。
(もっと読む)
小型電動車両
【課題】回生ブレーキによって発生したエネルギーで充電されるバッテリを搭載した小型電動車両において、長い降坂路でバッテリが過充電となるのを防止する。
【解決手段】過電圧運転抑止モードと通常運転モードを選択可能に構成し、過電圧運転抑止モードでは、バッテリ29の初期充電時の容量制限値を満充電未満の値に設定し、回生ブレーキによる充電に対して容量に余裕をもたせる。この初期充電容量の制限によっても、走行中に過充電となった場合は、車速の最高値を制限する車速上限値を下方に再設定し、車速を制限して回生ブレーキによる発電量を低減させる。
(もっと読む)
列車制御方法及び装置
【課題】踏切の開閉状態に基づいて列車の停止位置を踏切手前、または、所定停止位置に制御するのに好適な列車制御装置を提供する。
【解決手段】踏切の開閉情報を地上装置に設定し、地上装置では自軌道回路番号、停止軌道回路番号、踏切の開閉状態からなる信号を軌道回路を介して列車制御装置へ送信する。車上側の列車制御装置では、踏切開の場合の停止パターン、踏切閉の場合の停止パターンがデータベースとしてメモリに記憶してあり、列車制御装置では、地上装置より受信した信号により、踏切開閉情報に対応した停止パターンを参照して列車の速度制御を行う。
(もっと読む)
車両制御システム
【課題】一般的な鉄道車両が搭載している車上で停止ブレーキを作成することができる設備のみで車両の定時運行を実現する列車自動運転制御を提供する。
【解決手段】停車位置に停車するために考えられる複数のブレーキパターンを持っている、あるいは複数のブレーキパターンを動的に作成することができ、また、車両のブレーキ段と地形の勾配情報から求まる当該列車の実減速度に基づき次の停車位置に到着する時間を予測する手段を持つ車上制御装置を有するシステムにおいて、車両の現在位置から次の停車位置に到着する到着予測時間と、ダイヤにより定まっている次の停車位置に到着する到着予定時間を比較し、駆動力もしくはブレーキ力を制御することにより、車両の定時運行を自動的に実現する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】挙動安定制御が適用されるハイブリッド車両の低コスト化を達成する。
【解決手段】ハイブリッド車両には、駆動源としてのエンジンおよびモータジェネレータを備えたパワーユニットが搭載される。制動時に車輪のスリップを抑制するアンチロックブレーキ制御や、加速時に車輪のスリップを抑制するトラクション制御が実行される場合には、モータジェネレータのモータトルクがゼロに制御される(ステップS4)。また、車両に作用するヨーモーメントを打ち消すビークルダイナミックス制御が実行される場合であっても、パワーユニットに対するトルクダウン要求がある場合(ステップS6)には、モータジェネレータのモータトルクがゼロに制御される(ステップS4)。これにより、エンジンのみを制御してパワーユニットからの駆動トルクを制御することができるため、挙動安定制御の簡素化を図るとともにハイブリッド車両の低コスト化を図ることができる。
(もっと読む)
車両の衝突時ブレーキ配分制御装置
【課題】 車両が衝突した際、制動距離の伸び防止と、モータジェネレータのトルク急変の防止と、溶着故障することのないリレーによる強電回路の遮断と、を併せて達成することができる車両の衝突時ブレーキ配分制御装置を提供すること。
【解決手段】 1つ以上の蓄電装置と、制駆動に用いる1つ以上のモータジェネレータMGと、を備え、ブレーキ操作を伴う車両減速時や車両停止時には、摩擦ブレーキの一部または全部を減少させ、減少分を前記モータジェネレータMGによる回生ブレーキに配分する回生協調制御を行う車両において、車両が衝突した際に、前記モータジェネレータMGによる回生ブレーキの配分を減らし、前記摩擦ブレーキの配分を増やす衝突時ブレーキ配分制御手段(図9)を設けた。
(もっと読む)
電動駆動制御システム及び電動駆動制御方法
【課題】上位の制御装置から電動機械制御装置に異常信号が送られたときに、電動機械制御装置が誤動作するのを防止することができるようにする。
【解決手段】上位の制御装置から送信されたディジタルの信号を、入力信号として受信する情報受信処理手段と、受信された入力信号を、あらかじめ設定されたディジタルの制限値によって制限する入力信号制限処理手段と、制限された後の処理後信号を受けて、所定の制御処理を行う制御処理手段とを有する。受信された入力信号が、あらかじめ設定されたディジタルの制限値によって制限され、制限された後の処理後信号に基づいて所定の制御処理が行われる。制限値を超えた処理後信号が制御処理手段に送られることがないので、電動機械制御装置が誤動作するのを防止することができる。
(もっと読む)
車両制動装置
【課題】電動機を備えた車両において、変速機による変速比が変更される際の減速度の変動を抑制する。
【解決手段】駆動力と回生制動力の双方を変速機10を介して車輪に付与可能なモータ14を備えた車両を制動する車両制動装置100において、変速比変更期間算出部114は、変速機10の変速比が変更される期間を算出する。回生制動力低減部116は、変速比が変更される期間が協調制御中の場合に、その期間において車輪へのアクセルペダルの操作が解除されたことにより車輪に発生している第1の回生制動力を低減する。低下制動力補償部118は、その期間において低減される回生制動力の低下分を液圧制動力により補償する。
(もっと読む)
鉄道車両のブレーキシステム
【課題】走行時の速度超過を防止する。
【解決手段】速度発電機2とGPS受信機及びGPSアンテナ3とATS受信機4と処理装置5を備える。処理装置5には、距離−標準速度曲線、距離−制限速度曲線、基準固定点の位置情報を事前に入力する。速度発電機等2〜4からの信号を受信し、固定点に列車1が在線中は、固定点に所在していることを入力し、列車位置を基準固定点の位置情報に合わせる。列車走行中は、速度発電機2の速度情報から距離−実速度曲線を作成する。基準固定点に列車1が所在している場合は、算出列車位置を基準固定点の位置データに補正する。実速度が制限速度を超えた場合、ブレーキ制御器21にブレーキ信号を出力する。距離−制限速度曲線以下となった場合はブレーキ信号を解除する。距離−実速度曲線等を記録保存する。
【効果】ATCが導入されず軌道回路がない路線も、制限速度を超えると的確にブレーキをかけることができる。
(もっと読む)
自動列車運転装置
【課題】簡単な演算アルゴリズムを用いながらも定位置停止制御の際の停止精度を向上させること。
【解決手段】走行計画算出手段4が算出した走行計画に基づき、減速開始判断手段7、減速制御手段8、及び最終位置決め制御手段9は、それぞれ前向き予測の手法を用いて減速開始時点の判断、減速制御、最終位置決め制御を行い、制御モード判定手段5が判定したモードに従ってノッチ指令をノッチ出力決定手段10に出力する。
(もっと読む)
ハイブリッド車の減速度制御装置
【課題】 ブレーキアシスト手段の失陥時であっても、制動性能低下を抑制し、車両を安全に減速・停止することができるハイブリッド車の減速度制御装置を提供すること。
【解決手段】 動力源としてエンジンと少なくとも一つのモータを有し、ドライバーの減速要求操作に対してブレーキアシスト手段への作動指令により要求減速度を実現する減速度制御手段を備えたハイブリッド車の減速度制御装置において、前記ブレーキアシスト手段の失陥を検出するブレーキアシスト失陥検出手段(ステップS1)を設け、前記減速度制御手段は、前記ブレーキアシスト手段の失陥時、ドライバーの要求減速度を実現するエンジンブレーキとモータ回生を実行する手段とした。
(もっと読む)
自動列車運転装置及びその調整方法
【課題】 列車の実減速度が調整時の値から変化した場合等にも安定した定点停止制御を遂行することができる自動列車運転装置を得る。
【解決手段】 速度・加速度・残走距離演算部5により列車速度、列車加速度及び残走距離を演算し、その演算結果から目標パターン演算部8により駅別パターンβ格納部9に格納された駅別の目標パターン減速度を参照して目標パターンが演算され、この目標パターン及び上記列車速度に基きブレーキノッチ選択部10によりブレーキノッチが選択されると共に、走行軌跡・ブレーキ記憶部12にブレーキノッチ及び列車走行軌跡が記憶され、この記憶されたブレーキノッチ及び列車走行軌跡をパターンβ補正部13により分析して、分析結果により駅別パターンβ格納部9に格納された駅別の目標パターン減速度を補正することにより、次回走行からは、より適切な定点停止制御を行えるようにした。
(もっと読む)
41 - 60 / 84
[ Back to top ]