
Fターム[5H115TB10]の内容
車両の電気的な推進・制動 (204,712) | 速度検出 (3,622) | その他の速度検出 (19)
Fターム[5H115TB10]に分類される特許
1 - 19 / 19
電動車両の発進時ずり下がり防止制御装置
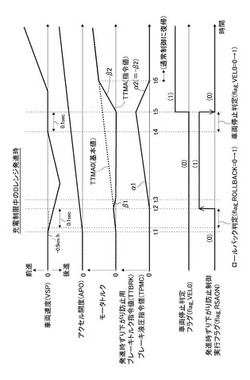
【課題】充電制限により回生制動が得られなくても、車両のずり下がりを確実に防止し得る装置を提供する。
【解決手段】充電制限中のDレンジ停車状態で瞬時t1以降、アクセル開度APO(モータトルクTTMA0)を増大させて行う発進操作中(当初はモータトルク指令値TTMA=TTMA0)、車両速度VSP≦-0.5km/hが0.1sec継続するt2に、ずり下がり防止制御を開始(flag_RSAON=1)。一方でTTMAを一定変化率β1で低下させt3に0となし、他方でブレーキトルク指令値TTBRK(ブレーキ液圧指令値TPMC)を一定変化率α1で、TTMA0と同じトルク値となるよう増大させ、摩擦制動により、ずり下がりを防止する。VSP=0が0.1sec継続する、ずり下がり防止完了時t5より、TTMAを一定変化率β2でTTMA0に復帰させ、TTBRK(TPMC)を一定変化率α2(=-β2)で0へ低下させる。
(もっと読む)
電気自動車および制動プログラム

【課題】車輪のロックを検出して制動力の制御を行う場合に比較して、制動距離を短くすることができる電気自動車および制動プログラムを提供する。
【解決手段】
前輪側の左右輪2fr,2flと後輪側の左右輪2rr,2rlとを独立に駆動する2つの電気モータ3を有する電気自動車1において、各車輪2のそれぞれに摩擦力による制動力を付与可能な摩擦ブレーキ機構と、運転者のブレーキ操作量に応じて摩擦ブレーキ機構による制動力および電気モータ3による制動力を共に発揮させ、各車輪2の少なくとも何れかのスリップ率が路面の摩擦係数に応じて設定された第1の所定値を超えたとき、ブレーキ操作量に関わらず電気モータ3による制動力を低減し、その後スリップ率が前記第1の所定値よりも低い第2の所定値以下となったとき、電気モータ3による制動力を増加する制御を行う制御装置10とを備える。
(もっと読む)
電気自動車および制動プログラム
【課題】様々な路面において安全、確実に車両を制動することができる電気自動車および制動プログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、各車輪2のそれぞれに摩擦力による制動力を付与可能な摩擦ブレーキ機構と、各車輪2のスリップ率が所定の値以下のときは、ブレーキペダル13の踏み込み量に応じて機械ブレーキ18の制動力および電気ブレーキの制動力を共に発揮させ、各車輪2のスリップ率のいずれかが所定の値を超えたとき、ブレーキペダル13の踏み込み量に関わらず、所定の値を超えたスリップ率が所定の値以下になるように、電気ブレーキの制動力を制御するとともに、機械ブレーキ18の制動力を段階的に変化させ、又はオンオフ制御する制御装置10とを備える。
(もっと読む)
踏切保安装置
【課題】地上設備を簡略化して設置費用を低減して踏切制御の適正化を図る。
【解決手段】列車2に搭載された車上装置3は、常時、GPS受信機8でGPS衛星15から送信されて電波を利用して列車2の位置(緯度・経度)と時刻を得て各踏切6に対する踏切到着予定時間をセンタ装置4に送信する。センタ装置4は車上装置3から踏切到着予定時間を受信するときGPS受信機22から入力する時刻により時間同期し、受信した踏切到着予定時間を各踏切6に設けられた踏切制御装置5に送信する。踏切制御装置5はセンタ装置4から踏切到着予定時間を受信するときGPS受信機32から入力する時刻により時間同期し、受信した踏切到着予定時間とGPS受信機32から入力する時刻により警報開始時間や警報終了時間を決定して踏切制御を行う。
(もっと読む)
列車制御装置
【課題】GPSを利用して列車が停止しているかどうかを精度良く検出して列車の速度を制御する。
【解決手段】2台のGPS受信機3a,3bから出力する位置信号Pa,Pbから算出した速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になったとき、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致しなく、速度Vaと速度Vbの速度ベクトルの方向が列車1の経路情報と一致しなく、方位Dgがランダムに変動していることを検出したときに列車1が停止していると判定して、地上子やトランスポンダ等の地上設備を必要としないで2台のGPS受信機3a,3bからの位置信号Pa,Pbで列車1が停止していることを精度良く検出して地上設備を省略して設備費を低減する。
(もっと読む)
列車制御装置
【課題】GPSを利用して列車の位置を正確に検出して列車の速度を制御する。
【解決手段】GPS受信機3a,3bから出力される位置情報により算出したGPSアンテナ2a,2b間の距離と方位と列車1の走行経路が制御情報記憶部5に記憶しているGPSアンテナ2a,2b間の距離Lと方位Dp及び走行経路と近似しているかどうかを判定するとともにGPS受信機3a,3bから出力される速度情報が列車1の実走行速度Vと近似しているかどうかを判定し、全てが近似しているとき、GPS受信機3a,3bの精度良好として列車1の前部に設けられたGPSアンテナ2aが接続されたGPS受信機3aから出力する位置情報により列車1の走行位置を決定して列車1の走行位置を検出するための地上子等を地上に設置する必要がなく、地上設備を簡略化して設備費を低減する。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置にて、変速機入力軸の回転速度を検出するセンサの異常の有無を判定すること。
【解決手段】電動機出力軸の接続状態を、動力伝達系統が変速機入力軸と電動機出力軸との間で形成される「IN接続状態」、変速機出力軸と電動機出力軸との間で形成される「OUT接続状態」、並びに、いずれにも動力伝達系統が形成されない「ニュートラル状態」の何れかに選択可能な切替機構が備えられる。内燃機関出力軸、電動機出力軸、及び変速機出力軸の回転速度のうち、その回転速度に対応する軸と変速機入力軸との間で動力伝達系統が形成されていることで正常時にて変速機入力軸の回転速度と既知の相関関係を有する回転速度のセンサ検出値と、変速機入力軸のセンサ検出値との比較結果に基づいて、変速機入力軸の回転速度を検出するセンサの異常の有無が判定される。
(もっと読む)
車内信号表示装置
【課題】運転士の負担を軽減してより安全運転を確保する。
【解決手段】列車1の走行位置が照査速度一定の区間では、その照査速度を示す車内信号表示部11の照査速度指示灯17a(17m)を選択して点灯し、列車1の速度を減速する区間では、列車1が走行している位置に対応した照査速度と減速が収束する照査速度との間の照査速度を示す全ての照査速度指示灯17a〜17m(17c〜17m,17e〜17m,17h〜17m)を選択して点灯して運転士に減速制御区間か停止制御区間かと制限速度区間や停止限界に接近したことを示す運転上有益な情報を伝える。
(もっと読む)
電動車両の充電システム
【課題】確実に充電対象車両を認証した上で外部電源による充電を許可することが可能な電動車両の充電システムを提供する。
【解決手段】屋内等のセキュリティが確保された空間340に設置された充電指示装置300は、キー保持部350に保持された車両キー150に記憶されたキー情報(ID)を読出すとともに、読出したIDを、充電装置200を介して電動車両100へ送信する。電動車両100では、充電指示装置300から送信されたIDを、予め記憶された登録情報と照合することにより認証を行なう。そして、認証結果は、充電装置200を介して、電動車両100から充電指示装置300へ送信される。充電指示装置300は、電動車両100から送信された認証結果に基づいて、充電装置200による電動車両100の充電を許可する。
(もっと読む)
車両
【課題】車両の進行方向の段差をセンサによって検出し、該センサによって計測した段差の計測値に基づいて段差の昇降に適した駆動トルクを駆動輪に付与することによって、段差昇降のときの姿勢及び走行状態を安定に保つことができ、段差のある場所でも安全に、かつ、快適に走行することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、路面の段差を検出するセンサと、前記駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、路面の段差を昇降するときに、前記センサによって計測した段差の計測値と車両の段差昇降状態に基づき、前記段差の昇降に必要な駆動トルクを算出する。
(もっと読む)
動力出力装置およびその制御方法並びに車両
【課題】蓄電装置をより適正に冷却する。
【解決手段】バッテリの管理中心SOC*に基づくバッテリの予測損失Lestが大きいほど大きくなる傾向にバッテリを冷却する冷却ファンの目標回転数Nf*を設定し(S310,S320)、設定した目標回転数Nf*で冷却ファンが回転するようファンモータを駆動制御する(S330)。これにより、管理中心SOC*に基づく予測損失Lestが比較的大きいときでも十分にバッテリを冷却することができると共に予測損失Lestが比較的小さいときにはファンモータでの電力消費を抑制することができる。
(もっと読む)
制御装置および制御装置を備えた走行体
【課題】最適、かつ安全性に富んだ列車等の走行体の制御を行う。
【解決手段】電力を利用して走行路12a、12b上を移動する列車10が利用する電力を蓄電する電力貯蔵手段の貯蔵残電力が計測され、検出された残電力量等に基づいて列車10の走行計画を立てる。
(もっと読む)
車両のトルク配分制御装置
【課題】 左右輪車輪速が目標車輪速から乖離するモータやブレーキ系の異常時、直進走行安定性や旋回走行安定性を確保することができる車両のトルク配分制御装置を提供すること。
【解決手段】 前後輪のうち少なくとも一方の左右輪がそれぞれ2つのモータにより駆動され、両モータへのトルク出力指令により左右輪へのトルク配分を制御する左右トルク配分制御手段を備えた車両において、左右輪の実車輪速と目標車輪速の差異が規定値以上であることにより異常を判定する異常判定手段(ステップS2)を設け、前記左右トルク配分制御手段は、前記異常判定手段による異常判定時、左右輪の実車輪速を適正値に戻すように左右輪へのトルク配分を調整する異常時対応トルク配分制御(ステップS5〜ステップS15)を実行する手段とした。
(もっと読む)
走行装置及びその制御方法
【課題】 障害物の回避を良好に行うことができるようにする。
【解決手段】 各距離センサ301〜304、301s〜304sの出力が距離計測器320に供給され、この計測器320で計測された距離Ld、Ldsと、旋回レバー310からのレバー角度の信号が中央制御装置330に供給される。そして中央制御装置330では、ジャイロセンサ、加速度センサ等の姿勢センサ回路340の出力信号と共に演算によりモータ駆動制御信号が形成される。この駆動信号がモータ制御装置351、352に供給されてモータ361、362が駆動され、これらの駆動力が減速機371、372を介してタイヤ381、382に伝達される。また、モータ361、362には二次電池電源回路390からの電源電圧が供給されると共に、これらのモータ361、362で発生される回生電力が回生コンデンサ391に蓄えられる。
(もっと読む)
電動二輪車の制御装置
【課題】 電気モータを用いて走行する電動二輪車に適用され、コーナリング中の走行安定性を向上させることができる電動二輪車の制御装置を提供する。
【解決手段】 本発明に係る電動二輪車の制御装置は、電気モータを用いて走行する電動二輪車のスロットルの開度に応じた駆動力制御信号に基づいて、電気モータの回転によって生じる駆動力を制御するモータ制御量を演算するモータ制御量演算部と、電動二輪車の車速を検出する車速検出部と、ヨーレートを検出するヨーレート検出部と、ロールレートを検出するロールレート検出部と、検出した車速、ヨーレート及びロールレートに基づいて、モータ制御量の補正に用いられる補正量を生成する補正量生成部とを備える。
(もっと読む)
データ収録装置
【課題】 効率的なデータ収録装置を実現すること。
【解決手段】 第1の物理量を第1の計測手段により計測し、第1の物理量より時間的変化量の変動が少ない第2及び第3の物理量をそれぞれ第2及び第3の計測手段により計測し、第2の計測手段による計測結果と前記第3の計測手段による計測結果とを時分割して計測複合データを生成し、第1の計測手段による計測結果のデータと計測複合データとを時間軸を共通にする時間推移記録として記録するようにした。
(もっと読む)
ピッチ調節による乗り物の制御
【課題】1以上の前輪と1以上の後輪とを備えた乗り物の安定性を積極的に維持し制御して、前輪が地面から離れたり外れたりした場合でもバランスのとれた動作を可能とする。
【解決手段】1以上の前輪と1以上の後輪を含む複数の車輪を備えた乗り物において、各後輪を駆動する1以上のモータアクチュエータと、モータアクチュエータを制御するコントローラとを設け、モータアクチュエータは、前輪が乗り物が走行する面に接触しているか否かとは無関係に一定の制御規則に従って乗り物を動的に安定化するように、モータアクチュエータを制御する。右後側及び左後側アクチュエータを設けて左右の後輪を独立して駆動するようにし、コントローラが左後輪と右後輪の差動回転を制御するようにして、乗り物のヨー制御を行う形態も可能である。
(もっと読む)
電動車両の車輪空転防止装置
【課題】 従来の電動車両の車輪空転防止装置では、デジタル制御のように一定周期ごとに巻線電流指令値を更新する場合においては、巻線電流指令値がステップ状に変化してしまうので、スリップを収束させる時にステップ状にトルク変動が発生し車両の振動が発生してしまうという問題点があった。
【解決手段】 電動車両の車輪を回転駆動するモータ(9)と、前記電動車両の実車速を推定する実車速推定手段(3)と、前記電動車両の車輪のスリップの発生を検知するスリップ検知手段(1)と、ドライバのアクセル操作によるアクセル開度を監視するアクセル開度モニタ手段(2)と、アクセル開度に応じて前記モータの巻線電流を制御し、前記スリップ検知手段によってスリップ発生が検出されたときは、前記実車速推定車速推定手段によって推定された前記実車速に基づき巻線電流指令値を生成し、これによって前記巻線電流を制御するモータ制御装置とをそなえることを特徴とする電動車両の車輪空転防止装置を提供する。
(もっと読む)
電気駆動車両用のブレーキ制御システム
【課題】 電気駆動車両用のブレーキ制御システムを提供する。
【解決手段】 モータとブレーキとを有する車両の制動を制御するための方法が提供される。本方法は、モータの実際の動作パラメータを感知するステップと、モータの所望の動作パラメータを受信するステップとを含む。モータは、モータの実際の動作パラメータと所望の動作パラメータとに基づき制御される。ブレーキは、モータの実際の動作パラメータと所望の動作パラメータとモータ制御部からの出力とに基づき制御される。
(もっと読む)
1 - 19 / 19
[ Back to top ]