
列車制御装置
【課題】GPSを利用して列車が停止しているかどうかを精度良く検出して列車の速度を制御する。
【解決手段】2台のGPS受信機3a,3bから出力する位置信号Pa,Pbから算出した速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になったとき、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致しなく、速度Vaと速度Vbの速度ベクトルの方向が列車1の経路情報と一致しなく、方位Dgがランダムに変動していることを検出したときに列車1が停止していると判定して、地上子やトランスポンダ等の地上設備を必要としないで2台のGPS受信機3a,3bからの位置信号Pa,Pbで列車1が停止していることを精度良く検出して地上設備を省略して設備費を低減する。
【解決手段】2台のGPS受信機3a,3bから出力する位置信号Pa,Pbから算出した速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になったとき、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致しなく、速度Vaと速度Vbの速度ベクトルの方向が列車1の経路情報と一致しなく、方位Dgがランダムに変動していることを検出したときに列車1が停止していると判定して、地上子やトランスポンダ等の地上設備を必要としないで2台のGPS受信機3a,3bからの位置信号Pa,Pbで列車1が停止していることを精度良く検出して地上設備を省略して設備費を低減する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、列車に搭載したGPSを利用して列車が停止しているか否を検知する列車制御装置に関するものである。
【背景技術】
【0002】
列車の速度を制限する装置として、列車が停止信号に接近して地上子と結合すると地上子から列車に停止信号を送り自動的に列車を停止させるATS装置や、速度制限区間に設けた複数の送信器から連続して速度制限信号を列車に送信して列車の速度を自動的に制限速度以下に制御するATC装置が使用されている。
【0003】
このATS装置やATC装置は制限速度を変える場所や停止位置に地上設備を設置する必要があり、地上設備に多くの費用がかかってしまう。
【0004】
この地上設備を必要とせずに、GPSを利用して列車の走行位置を検知して速度制御を行う装置が特許文献1や特許文献2、特許文献3に開示されている。特許文献1に示された車両運転支援システムは、車両に搭載したGPS受信機からの緯度・経度信号に基づいて車両の現在位置を検出し、検出した車両の位置が速度検知エリア内であるか否を判定し、速度検知エリアで列車の速度が制限速度を越えないように制御している。
【0005】
特許文献2に示された列車走行情報検知装置は、複数の車両で編成された列車の先頭車両と最後尾車両にGPS受信機を搭載し、各GPS受信機からの緯度・経度信号に基づいて列車の前後の現在位置をそれぞれ検出し、検出した列車の前後の現在位置とGPSアンテナの設置位置により測位計算をして列車全体の在線位置と向きを把握している。
【0006】
また、特許文献3に示された車両の停止検知装置は、GPS信号により車両の速度を算出し、算出した速度が停止判定閾値未満のとき、車両が停止していると判定している。
【発明の概要】
【発明が解決しようとする課題】
【0007】
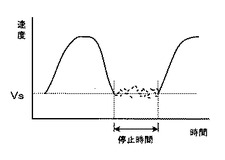
移動する列車に搭載されたGPS受信機から得られる位置データは、実際に列車が停止していても一定していなく、図5に示すように、停止位置を中心として刻々と変動し停止位置の周囲位置をランダムに変化するようなデータになる。このGPS受信機から得られる位置データから得られる列車の速度も、図5に示すように、列車が走行している場合は、実際の速度に応じた速度を得ることはできるが、列車が停止している場合は停止判定閾値Vsを中心として刻々と変動し、実際に列車が停止しているかどうかを判定することは困難となっている。
【0008】
この発明は、このような問題を解消し、GPSを利用して列車が停止しているかどうかを精度良く検出して列車の速度を制御することができる列車制御装置を提供することを目的とするものである。
【課題を解決するための手段】
【0009】
この発明の列車制御装置は、2台のGPSアンテナと2台のGPS受信機及び車上装置を有し、前記2台のGPSアンテナは、列車の前後に一定の設置間隔を隔てて設けられ、前記2台のGPS受信機の一方のGPS受信機は、前記列車の前部に設けられたGPSアンテナに接続され、他方のGPS受信機は、前記列車の後部に設けられたGPSアンテナに接続され、前記車上装置は、制御情報記憶部と演算処理部及び停止判定部を有し、前記制御情報記憶部には、前記2台のGPSアンテナの設置間隔と列車が走行する経路情報があらかじめ格納され、前記演算処理部は、前記2台のGPS受信機からそれぞれ出力する位置信号により速度Vaと速度Vbを算出するとともに前記2台のGPS受信機から出力する位置信号により前記2台のGPSアンテナ間の方位を算出し、算出した速度Vaと速度Vbがランダムに変動するかどうかと、算出した速度Vaと速度Vbが一致しているかどうかと、算出した速度Vaと速度Vbの速度ベクトルの方向が前記情報記憶部に記憶した列車の経路と一致しているかどうかと、算出した方位がランダムに変動するかどうかを判定して前記停止判定部に出力し、前記停止判定部は、前記演算処理部から入力する速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になって、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致していなく、速度Vaと速度Vbの速度ベクトルの方向が列車の経路と一致していなく、GPSアンテナ間の方位がランダムに変動していることを示す信号を入力すると列車が停止していると判断することを特徴とする。
【発明の効果】
【0010】
この発明は、列車の前後に一定の設置間隔を隔てて設けられた2台のGPSアンテナにそれぞれ接続された2台のGPS受信機からそれぞれ出力する位置信号により速度Vaと速度Vbを算出するとともに2台のGPS受信機から出力する位置信号により2台のGPSアンテナ間の方位を算出し、算出した速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になって、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致していなく、速度Vaと速度Vbの速度ベクトルの方向が列車の経路と一致していなく、GPSアンテナ間の方位がランダムに変動しているときに列車が停止していると判定するから、地上子やトランスポンダ等の地上設備を必要としないで2台のGPS受信機からの位置信号で列車が停止していることを精度良く検出することができ、地上設備を省略して設備費を低減することができる。
【図面の簡単な説明】
【0011】
【図1】この発明の列車制御装置の構成図である。
【図2】車上装置の構成を示すブロック図である。
【図3】車上装置の他の構成を示すブロック図である。
【図4】GPS受信機に位置信号の列車停止位置における変化を示す模式図である。
【図5】GPS受信機の位置信号から得た列車速度の変化を示す模式図である。
【発明を実施するための形態】
【0012】
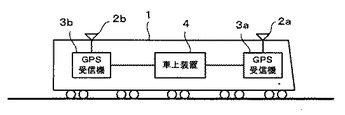
図1はこの発明の列車制御装置の構成図である。図に示すように、複数編成の車両を有する列車1の列車制御装置は、列車1の前後に一定の設置間隔Lを隔てて設けられた2台のGPSアンテナ2a,2bを有するGPS受信機3a,3bと車上装置4を有する。
【0013】
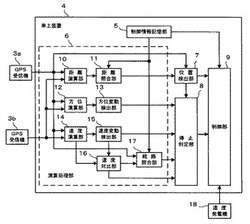
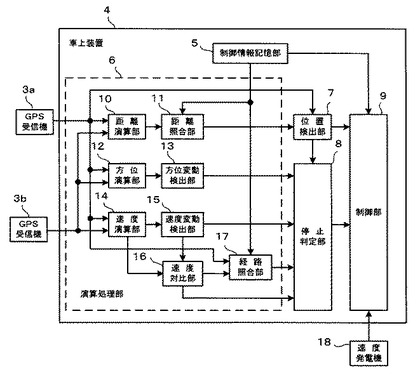
車上装置4は、図2のブロック図に示すように、制御情報記憶部5と演算処理部6と列車位置検出部7と停止判定部8及び制御部9を有する。制御情報記憶部5には2台のGPSアンテナ2a,2bの設置間隔Lと列車1の走行する経路情報及び速度制限区間毎の制限速度情報があらかじめ格納されている。
【0014】
演算処理部6は、距離演算部10と距離照合部11と方位演算部12と方位変動検出部13と速度演算部14と速度変動検出部15と速度対比部16及び経路照合部17を有する。
【0015】
距離演算部10はGPS受信機3aから出力される位置信号PaとGPS受信機3bから出力される位置信号Paにより列車1の前後に設けた2台のGPSアンテナ2a,2b間の距離Lxを算出して距離照合部11に出力する。距離照合部11は距離演算部10から入力するGPSアンテナ2a,2b間の距離Lxと制御情報記憶部5に記憶しているGPSアンテナ2a,2bの設置間隔Lとを比較し、算出した距離LxがGPSアンテナ2a,2bの設置間隔Lと一致又は近似している場合は、2台のGPS受信機3a,3bが正常に動作していると判定し、算出した距離Lxが設置間隔Lと近似していない場合は、2台のGPS受信機3a,3bのいずれか一方又は両方に異常が生じたと判定して位置検出部7と停止判定部8に出力する。
【0016】
方位演算部12はGPS受信機3aから出力される位置信号PaとGPS受信機3bから出力される位置信号PbからGPSアンテナ2a,2b間の方位Dgを算出して方位変動検出部13に出力する。方位変動検出部13は方位演算部12から入力する方位Dgがランダムに変動するかどうかを検出して停止判定部8に出力する。
【0017】
速度演算部14はGPS受信機3aから出力される位置信号Paにより速度Vaを算出し、GPS受信機3bから出力される位置信号Pbにより速度Vbを算出して速度変動検出部15と速度対比部16に出力する。速度変動検出部15は速度演算部14から入力する速度Vaと速度Vbがランダムに変動するかどうかを検出して検出結果を速度対比部16と停止判定部8に出力する。速度対比部16は速度変動検出部15から速度Vaと速度Vbがランダムに変動していないことを示す信号を入力すると速度演算部14から入力する速度Vaと速度Vbが一致しているかどうかを判定して判定結果とそのときの速度Vaと速度Vbを経路照合部17と停止判定部8に出力する。経路照合部17は速度対比部16から速度Vaと速度Vbが一致していることを示す信号を入力すると、制御情報記憶部5に記憶している列車1の経路情報に示すそのときの位置信号Paに対応する経路の方向と入力した速度Vaと速度Vbの速度ベクトルの方向が一致しているかどうかを判定して停止判定部8に出力する。
【0018】
位置検出部7は距離照合部11から2台のGPS受信機3a,3bが正常に動作していることを示す信号を入力するときだけGPS受信機3aから入力する位置信号Paを列車1の位置として制御部9に出力する。
【0019】
停止判定部8は位置検出部7で列車1の位置を検出している状態及び位置を検出していないとき、速度対比部16から出力する速度Vaと速度Vbと、速度変動検出部15から出力する速度Vaと速度Vbがランダムで変化しているかどうかを示す信号と、方位変動検出部13から出力する方位Dgがランダムに変動しているかどうかを示す信号及び経路照合部17から出力する速度Vaと速度Vbの速度ベクトルの方向が列車1が走行している経路と一致しているかどうかを示す信号を入力して列車1が走行しているか停止しているかを検出する。
【0020】
この列車制御装置で列車1が走行しているか停止しているかを検出するときの処理を説明する。
【0021】
GPS受信機3aは列車1の前部に設置したGPSアンテナ2aから出力される信号により位置信号Paを演算処理部6と列車位置検出部7に出力し、GPS受信機3bは列車1の後部に設置したGPSアンテナ2bから出力される信号により位置信号Pbを演算処理部6と列車位置検出部7に出力している。
【0022】
演算処理部6の距離演算部10はGPS受信機3aとGPS受信機3bから入力する位置信号Paと位置信号Pbにより列車1の前部に設けられたGPSアンテナ2aと列車1の後部に設けられたGPSアンテナ2a,2b間の距離Lxを算出して距離照合部11に出力し、速度演算部14はGPS受信機3aとGPS受信機3bから入力する位置信号Paと位置信号Pbを入力して速度Vaと速度Vbを算出して速度変動検出部15と速度対比部16に出力し、方位演算部12はGPS受信機3aとGPS受信機3bから入力する位置信号Paと位置信号PbによりGPSアンテナ2aとGPSアンテナ2b間の方位Dg、すなわち列車1の進行方向を算出して方位変動検出部13に出力する。
【0023】
距離照合部11は入力したGPSアンテナ2a,2b間の距離Lxと制御情報記憶部5に記憶しているGPSアンテナ2a,2bの設置間隔Lと比較し、算出した距離LxがGPSアンテナ2a,2bの設置間隔Lと一致又は近似している場合は2台のGPS受信機3a,3bが正常に動作していると判定し、GPS受信機3a,3bが正常に動作していることを示す信号を位置検出部7と停止判定部8に出力する。また、算出した距離Lxが設置間隔Lと一致又は近似していない場合は、2台のGPS受信機3a,3bのいずれか一方又は両方に異常が生じたと判定して、GPS受信機3a,3bの動作が異常であることを示す信号を位置検出部7と停止判定部8に出力する。
【0024】
このようにGPS受信機3aから出力する位置信号PaとGPS受信機3bから出力する位置信号P2に基づいて算出した距離Lxと列車1の前後に設置したGPSアンテナ2a,2bの設置間隔Lとを比較して一致するか否を判定することにより、GPS受信機3a,3bの異常の有無を確実に検出することができる。
【0025】
この状態で速度変動検出部15は速度演算部14から入力する速度Vaと速度Vbがランダムに変動するかどうかを検出して速度対比部16と停止判定部8に出力する。速度対比部16は速度変動検出部15から速度Vaと速度Vbがランダムに変動していないことを示す信号を入力すると速度演算部14から入力する速度Vaと速度Vbが一致しているかどうかを判定して判定結果とそのときの速度Vaと速度Vbを経路照合部17と停止判定部8に出力する。経路照合部17は速度対比部16から速度Vaと速度Vbが一致していることを示す信号を入力すると、制御情報記憶部5に記憶している列車1の経路情報のそのときの位置信号Paに対応する経路の方向と入力した速度Vaと速度Vbの速度ベクトルの方向が一致しているかどうかを判定して停止判定部8に出力する。また、方位変動検出部13は方位演算部12から入力する方位Dgがランダムに変動するかどうかを検出して停止判定部8に出力する。
【0026】
位置検出部7は距離照合部11から2台のGPS受信機3a,3bが正常に動作していることを示す信号を入力しているとGPS受信機3aから入力する位置信号Paを列車1の位置として制御部9に出力する。
【0027】
停止判定部8は位置検出部7で列車1の位置を検出している状態で、速度対比部16から入力する速度Vaと速度Vbが入力しているとき、速度変動検出部15から速度Vaと速度Vbがランダムに変動していないことを示す信号を入力し、速度対比部16から速度Vaと速度Vbが一致していることを示す信号を入力し、経路照合部17から速度Vaと速度Vbの速度ベクトルの方向が制御情報記憶部5に記憶している列車1の経路情報と一致していることを示す信号を入力し、方位演算部12から方位Dgがランダムに変動していないことを示す信号を入力していると、列車1は走行していると判断し、そのことを示す信号を制御部9に出力する。制御部9は停止判定部8から列車1が走行していることを示す信号を入力すると、位置検出部7から入力する列車1の走行位置に応じて制御情報記憶部5に記憶している制限速度情報により速度発電機18から出力される列車1の走行速度が制限速度以下になるように制御する。
【0028】
また、停止判定部8は速度対比部16から入力する速度Vaと速度Vbがあらかじめ設定された停止判定閾値、例えば3〜5km/h以下になった場合であっても、速度Vaと速度Vbが一致し、速度Vaと速度Vbの速度ベクトルの方向が列車1の経路情報と一致し、方位Dgがランダムに変動していないことを示す信号を入力していると列車1は走行していると判断する。
【0029】
また、停止判定部8は位置検出部7で列車1の位置を検出している状態から位置検知信号が入力しなくなり、速度対比部16から入力する速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になって、速度変動検出部15から速度Vaと速度Vbがランダムに変動していることを示す信号を入力し、速度対比部16から速度Vaと速度Vbが一致していないことを示す信号を入力し、経路照合部17から速度Vaと速度Vbの速度ベクトルの方向が制御情報記憶部5に記憶している列車1の経路情報と一致していないことを示す信号を入力し、方位演算部12から方位Dgがランダムに変動していることを示す信号を入力する、列車1は停止した判断し、そのことを示す信号を制御部9に出力する。
【0030】
このように2台のGPS受信機3a,3bから出力する位置信号Pa,Pbから算出した速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になったとき、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致しなく、速度Vaと速度Vbの速度ベクトルの方向が列車1の経路情報と一致しなく、方位Dgがランダムに変動していることを検出したときに列車1が停止していると判定するから、地上子やトランスポンダ等の地上設備を必要としないで2台のGPS受信機3a,3bからの位置信号Pa,Pbで列車1が停止していることを精度良く検出することができ、地上設備を省略して設備費を低減することができる。
【0031】
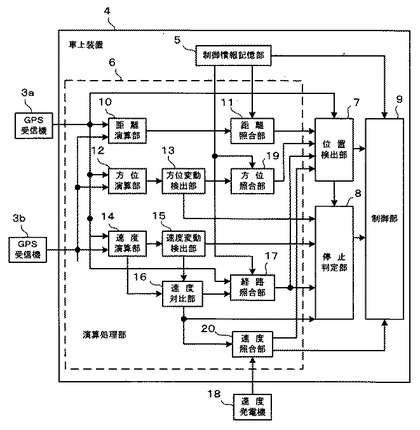
前記説明では、GPS受信機3aから出力する位置信号PaとGPS受信機3bから出力する位置信号P2に基づいて算出した距離Lxと列車1の前後に設置したGPSアンテナ2a,2bの設置間隔Lとを比較して一致するか否を判定してGPS受信機3a,3bの異常の有無を検出する場合について説明したが、図3のブロック図に示すように、演算処理部6に、方位変動検出部13から方位Dgがランダムに変動していないことを示す信号を入力したとき、制御情報記憶部5に記憶している列車1の進行方向の方位Dpとを比較し、入力した方位Dgが制御情報記憶部5に記憶している方位Dpと一致又は近似しているかどうかを判定して位置検出部7に出力する方位照合部19と、速度対比部16から速度入力Vaと速度Vbを入力したとき、入力した速度Va,Vbが速度発電機18から出力する実速度Vと一致又は近似しているかどうかを判定して位置検出部7に出力する速度照合部20を設けるとともに経路照合部17からの信号も位置検出部7に出力してGPS受信機3a,3bの異常の有無を検出しても良い。
【0032】
この場合は、GPS受信機3a,3bから出力される位置信号Pa,Pbにより算出したGPSアンテナ2a,2b間の距離Lxとそのときの地点における方位DgとGPS受信機3a,3bから出力される位置信号Pa,Pbから算出した速度Va,Vbの速度ベクトルの方向が、制御情報記憶部5に記憶しているGPSアンテナ2a,2b間の距離Lと方位Dp及び走行経路と一致又は近似しているかどうかを判定するとともに速度Va,Vbが列車1の実速度Vと近似しているかどうかを判定し、全てが近似しているとき、GPS受信機3a,3bの精度が良好として列車1の前部に設けられたGPSアンテナ2aが接続されたGPS受信機3aから出力する位置情報Paにより列車1の走行位置を決定する。このようにして列車1の走行位置を高精度に安定して決定することができるとともに列車が走行しているか停止しているからGPS受信機3a,3bからの信号だけで安定して検出することができる。
【符号の説明】
【0033】
1;列車、2;GPSアンテナ、3;GPS受信機、4;車上装置、
5;制御情報記憶部、6;演算処理部、7;列車位置検出部、8;停止判定部、
9;制御部、10;距離演算部、11;距離照合部、12;方位演算部、
13;方位変動検出部、14;速度演算部、15;速度変動検出部、
16;速度対比部、17;経路照合部、18;速度発電機、19;方位照合部、
20、速度照合部。
【先行技術文献】
【特許文献】
【0034】
【特許文献1】特開2002−335607号公報
【特許文献2】特開2004−168216号公報
【特許文献3】特開2008−58273号公報
【技術分野】
【0001】
この発明は、列車に搭載したGPSを利用して列車が停止しているか否を検知する列車制御装置に関するものである。
【背景技術】
【0002】
列車の速度を制限する装置として、列車が停止信号に接近して地上子と結合すると地上子から列車に停止信号を送り自動的に列車を停止させるATS装置や、速度制限区間に設けた複数の送信器から連続して速度制限信号を列車に送信して列車の速度を自動的に制限速度以下に制御するATC装置が使用されている。
【0003】
このATS装置やATC装置は制限速度を変える場所や停止位置に地上設備を設置する必要があり、地上設備に多くの費用がかかってしまう。
【0004】
この地上設備を必要とせずに、GPSを利用して列車の走行位置を検知して速度制御を行う装置が特許文献1や特許文献2、特許文献3に開示されている。特許文献1に示された車両運転支援システムは、車両に搭載したGPS受信機からの緯度・経度信号に基づいて車両の現在位置を検出し、検出した車両の位置が速度検知エリア内であるか否を判定し、速度検知エリアで列車の速度が制限速度を越えないように制御している。
【0005】
特許文献2に示された列車走行情報検知装置は、複数の車両で編成された列車の先頭車両と最後尾車両にGPS受信機を搭載し、各GPS受信機からの緯度・経度信号に基づいて列車の前後の現在位置をそれぞれ検出し、検出した列車の前後の現在位置とGPSアンテナの設置位置により測位計算をして列車全体の在線位置と向きを把握している。
【0006】
また、特許文献3に示された車両の停止検知装置は、GPS信号により車両の速度を算出し、算出した速度が停止判定閾値未満のとき、車両が停止していると判定している。
【発明の概要】
【発明が解決しようとする課題】
【0007】
移動する列車に搭載されたGPS受信機から得られる位置データは、実際に列車が停止していても一定していなく、図5に示すように、停止位置を中心として刻々と変動し停止位置の周囲位置をランダムに変化するようなデータになる。このGPS受信機から得られる位置データから得られる列車の速度も、図5に示すように、列車が走行している場合は、実際の速度に応じた速度を得ることはできるが、列車が停止している場合は停止判定閾値Vsを中心として刻々と変動し、実際に列車が停止しているかどうかを判定することは困難となっている。
【0008】
この発明は、このような問題を解消し、GPSを利用して列車が停止しているかどうかを精度良く検出して列車の速度を制御することができる列車制御装置を提供することを目的とするものである。
【課題を解決するための手段】
【0009】
この発明の列車制御装置は、2台のGPSアンテナと2台のGPS受信機及び車上装置を有し、前記2台のGPSアンテナは、列車の前後に一定の設置間隔を隔てて設けられ、前記2台のGPS受信機の一方のGPS受信機は、前記列車の前部に設けられたGPSアンテナに接続され、他方のGPS受信機は、前記列車の後部に設けられたGPSアンテナに接続され、前記車上装置は、制御情報記憶部と演算処理部及び停止判定部を有し、前記制御情報記憶部には、前記2台のGPSアンテナの設置間隔と列車が走行する経路情報があらかじめ格納され、前記演算処理部は、前記2台のGPS受信機からそれぞれ出力する位置信号により速度Vaと速度Vbを算出するとともに前記2台のGPS受信機から出力する位置信号により前記2台のGPSアンテナ間の方位を算出し、算出した速度Vaと速度Vbがランダムに変動するかどうかと、算出した速度Vaと速度Vbが一致しているかどうかと、算出した速度Vaと速度Vbの速度ベクトルの方向が前記情報記憶部に記憶した列車の経路と一致しているかどうかと、算出した方位がランダムに変動するかどうかを判定して前記停止判定部に出力し、前記停止判定部は、前記演算処理部から入力する速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になって、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致していなく、速度Vaと速度Vbの速度ベクトルの方向が列車の経路と一致していなく、GPSアンテナ間の方位がランダムに変動していることを示す信号を入力すると列車が停止していると判断することを特徴とする。
【発明の効果】
【0010】
この発明は、列車の前後に一定の設置間隔を隔てて設けられた2台のGPSアンテナにそれぞれ接続された2台のGPS受信機からそれぞれ出力する位置信号により速度Vaと速度Vbを算出するとともに2台のGPS受信機から出力する位置信号により2台のGPSアンテナ間の方位を算出し、算出した速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になって、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致していなく、速度Vaと速度Vbの速度ベクトルの方向が列車の経路と一致していなく、GPSアンテナ間の方位がランダムに変動しているときに列車が停止していると判定するから、地上子やトランスポンダ等の地上設備を必要としないで2台のGPS受信機からの位置信号で列車が停止していることを精度良く検出することができ、地上設備を省略して設備費を低減することができる。
【図面の簡単な説明】
【0011】
【図1】この発明の列車制御装置の構成図である。
【図2】車上装置の構成を示すブロック図である。
【図3】車上装置の他の構成を示すブロック図である。
【図4】GPS受信機に位置信号の列車停止位置における変化を示す模式図である。
【図5】GPS受信機の位置信号から得た列車速度の変化を示す模式図である。
【発明を実施するための形態】
【0012】
図1はこの発明の列車制御装置の構成図である。図に示すように、複数編成の車両を有する列車1の列車制御装置は、列車1の前後に一定の設置間隔Lを隔てて設けられた2台のGPSアンテナ2a,2bを有するGPS受信機3a,3bと車上装置4を有する。
【0013】
車上装置4は、図2のブロック図に示すように、制御情報記憶部5と演算処理部6と列車位置検出部7と停止判定部8及び制御部9を有する。制御情報記憶部5には2台のGPSアンテナ2a,2bの設置間隔Lと列車1の走行する経路情報及び速度制限区間毎の制限速度情報があらかじめ格納されている。
【0014】
演算処理部6は、距離演算部10と距離照合部11と方位演算部12と方位変動検出部13と速度演算部14と速度変動検出部15と速度対比部16及び経路照合部17を有する。
【0015】
距離演算部10はGPS受信機3aから出力される位置信号PaとGPS受信機3bから出力される位置信号Paにより列車1の前後に設けた2台のGPSアンテナ2a,2b間の距離Lxを算出して距離照合部11に出力する。距離照合部11は距離演算部10から入力するGPSアンテナ2a,2b間の距離Lxと制御情報記憶部5に記憶しているGPSアンテナ2a,2bの設置間隔Lとを比較し、算出した距離LxがGPSアンテナ2a,2bの設置間隔Lと一致又は近似している場合は、2台のGPS受信機3a,3bが正常に動作していると判定し、算出した距離Lxが設置間隔Lと近似していない場合は、2台のGPS受信機3a,3bのいずれか一方又は両方に異常が生じたと判定して位置検出部7と停止判定部8に出力する。
【0016】
方位演算部12はGPS受信機3aから出力される位置信号PaとGPS受信機3bから出力される位置信号PbからGPSアンテナ2a,2b間の方位Dgを算出して方位変動検出部13に出力する。方位変動検出部13は方位演算部12から入力する方位Dgがランダムに変動するかどうかを検出して停止判定部8に出力する。
【0017】
速度演算部14はGPS受信機3aから出力される位置信号Paにより速度Vaを算出し、GPS受信機3bから出力される位置信号Pbにより速度Vbを算出して速度変動検出部15と速度対比部16に出力する。速度変動検出部15は速度演算部14から入力する速度Vaと速度Vbがランダムに変動するかどうかを検出して検出結果を速度対比部16と停止判定部8に出力する。速度対比部16は速度変動検出部15から速度Vaと速度Vbがランダムに変動していないことを示す信号を入力すると速度演算部14から入力する速度Vaと速度Vbが一致しているかどうかを判定して判定結果とそのときの速度Vaと速度Vbを経路照合部17と停止判定部8に出力する。経路照合部17は速度対比部16から速度Vaと速度Vbが一致していることを示す信号を入力すると、制御情報記憶部5に記憶している列車1の経路情報に示すそのときの位置信号Paに対応する経路の方向と入力した速度Vaと速度Vbの速度ベクトルの方向が一致しているかどうかを判定して停止判定部8に出力する。
【0018】
位置検出部7は距離照合部11から2台のGPS受信機3a,3bが正常に動作していることを示す信号を入力するときだけGPS受信機3aから入力する位置信号Paを列車1の位置として制御部9に出力する。
【0019】
停止判定部8は位置検出部7で列車1の位置を検出している状態及び位置を検出していないとき、速度対比部16から出力する速度Vaと速度Vbと、速度変動検出部15から出力する速度Vaと速度Vbがランダムで変化しているかどうかを示す信号と、方位変動検出部13から出力する方位Dgがランダムに変動しているかどうかを示す信号及び経路照合部17から出力する速度Vaと速度Vbの速度ベクトルの方向が列車1が走行している経路と一致しているかどうかを示す信号を入力して列車1が走行しているか停止しているかを検出する。
【0020】
この列車制御装置で列車1が走行しているか停止しているかを検出するときの処理を説明する。
【0021】
GPS受信機3aは列車1の前部に設置したGPSアンテナ2aから出力される信号により位置信号Paを演算処理部6と列車位置検出部7に出力し、GPS受信機3bは列車1の後部に設置したGPSアンテナ2bから出力される信号により位置信号Pbを演算処理部6と列車位置検出部7に出力している。
【0022】
演算処理部6の距離演算部10はGPS受信機3aとGPS受信機3bから入力する位置信号Paと位置信号Pbにより列車1の前部に設けられたGPSアンテナ2aと列車1の後部に設けられたGPSアンテナ2a,2b間の距離Lxを算出して距離照合部11に出力し、速度演算部14はGPS受信機3aとGPS受信機3bから入力する位置信号Paと位置信号Pbを入力して速度Vaと速度Vbを算出して速度変動検出部15と速度対比部16に出力し、方位演算部12はGPS受信機3aとGPS受信機3bから入力する位置信号Paと位置信号PbによりGPSアンテナ2aとGPSアンテナ2b間の方位Dg、すなわち列車1の進行方向を算出して方位変動検出部13に出力する。
【0023】
距離照合部11は入力したGPSアンテナ2a,2b間の距離Lxと制御情報記憶部5に記憶しているGPSアンテナ2a,2bの設置間隔Lと比較し、算出した距離LxがGPSアンテナ2a,2bの設置間隔Lと一致又は近似している場合は2台のGPS受信機3a,3bが正常に動作していると判定し、GPS受信機3a,3bが正常に動作していることを示す信号を位置検出部7と停止判定部8に出力する。また、算出した距離Lxが設置間隔Lと一致又は近似していない場合は、2台のGPS受信機3a,3bのいずれか一方又は両方に異常が生じたと判定して、GPS受信機3a,3bの動作が異常であることを示す信号を位置検出部7と停止判定部8に出力する。
【0024】
このようにGPS受信機3aから出力する位置信号PaとGPS受信機3bから出力する位置信号P2に基づいて算出した距離Lxと列車1の前後に設置したGPSアンテナ2a,2bの設置間隔Lとを比較して一致するか否を判定することにより、GPS受信機3a,3bの異常の有無を確実に検出することができる。
【0025】
この状態で速度変動検出部15は速度演算部14から入力する速度Vaと速度Vbがランダムに変動するかどうかを検出して速度対比部16と停止判定部8に出力する。速度対比部16は速度変動検出部15から速度Vaと速度Vbがランダムに変動していないことを示す信号を入力すると速度演算部14から入力する速度Vaと速度Vbが一致しているかどうかを判定して判定結果とそのときの速度Vaと速度Vbを経路照合部17と停止判定部8に出力する。経路照合部17は速度対比部16から速度Vaと速度Vbが一致していることを示す信号を入力すると、制御情報記憶部5に記憶している列車1の経路情報のそのときの位置信号Paに対応する経路の方向と入力した速度Vaと速度Vbの速度ベクトルの方向が一致しているかどうかを判定して停止判定部8に出力する。また、方位変動検出部13は方位演算部12から入力する方位Dgがランダムに変動するかどうかを検出して停止判定部8に出力する。
【0026】
位置検出部7は距離照合部11から2台のGPS受信機3a,3bが正常に動作していることを示す信号を入力しているとGPS受信機3aから入力する位置信号Paを列車1の位置として制御部9に出力する。
【0027】
停止判定部8は位置検出部7で列車1の位置を検出している状態で、速度対比部16から入力する速度Vaと速度Vbが入力しているとき、速度変動検出部15から速度Vaと速度Vbがランダムに変動していないことを示す信号を入力し、速度対比部16から速度Vaと速度Vbが一致していることを示す信号を入力し、経路照合部17から速度Vaと速度Vbの速度ベクトルの方向が制御情報記憶部5に記憶している列車1の経路情報と一致していることを示す信号を入力し、方位演算部12から方位Dgがランダムに変動していないことを示す信号を入力していると、列車1は走行していると判断し、そのことを示す信号を制御部9に出力する。制御部9は停止判定部8から列車1が走行していることを示す信号を入力すると、位置検出部7から入力する列車1の走行位置に応じて制御情報記憶部5に記憶している制限速度情報により速度発電機18から出力される列車1の走行速度が制限速度以下になるように制御する。
【0028】
また、停止判定部8は速度対比部16から入力する速度Vaと速度Vbがあらかじめ設定された停止判定閾値、例えば3〜5km/h以下になった場合であっても、速度Vaと速度Vbが一致し、速度Vaと速度Vbの速度ベクトルの方向が列車1の経路情報と一致し、方位Dgがランダムに変動していないことを示す信号を入力していると列車1は走行していると判断する。
【0029】
また、停止判定部8は位置検出部7で列車1の位置を検出している状態から位置検知信号が入力しなくなり、速度対比部16から入力する速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になって、速度変動検出部15から速度Vaと速度Vbがランダムに変動していることを示す信号を入力し、速度対比部16から速度Vaと速度Vbが一致していないことを示す信号を入力し、経路照合部17から速度Vaと速度Vbの速度ベクトルの方向が制御情報記憶部5に記憶している列車1の経路情報と一致していないことを示す信号を入力し、方位演算部12から方位Dgがランダムに変動していることを示す信号を入力する、列車1は停止した判断し、そのことを示す信号を制御部9に出力する。
【0030】
このように2台のGPS受信機3a,3bから出力する位置信号Pa,Pbから算出した速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になったとき、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致しなく、速度Vaと速度Vbの速度ベクトルの方向が列車1の経路情報と一致しなく、方位Dgがランダムに変動していることを検出したときに列車1が停止していると判定するから、地上子やトランスポンダ等の地上設備を必要としないで2台のGPS受信機3a,3bからの位置信号Pa,Pbで列車1が停止していることを精度良く検出することができ、地上設備を省略して設備費を低減することができる。
【0031】
前記説明では、GPS受信機3aから出力する位置信号PaとGPS受信機3bから出力する位置信号P2に基づいて算出した距離Lxと列車1の前後に設置したGPSアンテナ2a,2bの設置間隔Lとを比較して一致するか否を判定してGPS受信機3a,3bの異常の有無を検出する場合について説明したが、図3のブロック図に示すように、演算処理部6に、方位変動検出部13から方位Dgがランダムに変動していないことを示す信号を入力したとき、制御情報記憶部5に記憶している列車1の進行方向の方位Dpとを比較し、入力した方位Dgが制御情報記憶部5に記憶している方位Dpと一致又は近似しているかどうかを判定して位置検出部7に出力する方位照合部19と、速度対比部16から速度入力Vaと速度Vbを入力したとき、入力した速度Va,Vbが速度発電機18から出力する実速度Vと一致又は近似しているかどうかを判定して位置検出部7に出力する速度照合部20を設けるとともに経路照合部17からの信号も位置検出部7に出力してGPS受信機3a,3bの異常の有無を検出しても良い。
【0032】
この場合は、GPS受信機3a,3bから出力される位置信号Pa,Pbにより算出したGPSアンテナ2a,2b間の距離Lxとそのときの地点における方位DgとGPS受信機3a,3bから出力される位置信号Pa,Pbから算出した速度Va,Vbの速度ベクトルの方向が、制御情報記憶部5に記憶しているGPSアンテナ2a,2b間の距離Lと方位Dp及び走行経路と一致又は近似しているかどうかを判定するとともに速度Va,Vbが列車1の実速度Vと近似しているかどうかを判定し、全てが近似しているとき、GPS受信機3a,3bの精度が良好として列車1の前部に設けられたGPSアンテナ2aが接続されたGPS受信機3aから出力する位置情報Paにより列車1の走行位置を決定する。このようにして列車1の走行位置を高精度に安定して決定することができるとともに列車が走行しているか停止しているからGPS受信機3a,3bからの信号だけで安定して検出することができる。
【符号の説明】
【0033】
1;列車、2;GPSアンテナ、3;GPS受信機、4;車上装置、
5;制御情報記憶部、6;演算処理部、7;列車位置検出部、8;停止判定部、
9;制御部、10;距離演算部、11;距離照合部、12;方位演算部、
13;方位変動検出部、14;速度演算部、15;速度変動検出部、
16;速度対比部、17;経路照合部、18;速度発電機、19;方位照合部、
20、速度照合部。
【先行技術文献】
【特許文献】
【0034】
【特許文献1】特開2002−335607号公報
【特許文献2】特開2004−168216号公報
【特許文献3】特開2008−58273号公報
【特許請求の範囲】
【請求項1】
2台のGPSアンテナと2台のGPS受信機及び車上装置を有し、
前記2台のGPSアンテナは、列車の前後に一定の設置間隔を隔てて設けられ、
前記2台のGPS受信機の一方のGPS受信機は、前記列車の前部に設けられたGPSアンテナに接続され、他方のGPS受信機は、前記列車の後部に設けられたGPSアンテナに接続され、
前記車上装置は、制御情報記憶部と演算処理部及び停止判定部を有し、
前記制御情報記憶部には、前記2台のGPSアンテナの設置間隔と列車が走行する経路情報があらかじめ格納され、
前記演算処理部は、前記2台のGPS受信機からそれぞれ出力する位置信号により速度Vaと速度Vbを算出するとともに前記2台のGPS受信機から出力する位置信号により前記2台のGPSアンテナ間の方位を算出し、算出した速度Vaと速度Vbがランダムに変動するかどうかと、算出した速度Vaと速度Vbが一致しているかどうかと、算出した速度Vaと速度Vbの速度ベクトルの方向が前記情報記憶部に記憶した列車の経路と一致しているかどうかと、算出した方位がランダムに変動するかどうかを判定して前記停止判定部に出力し、
前記停止判定部は、前記演算処理部から入力する速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になって、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致していなく、速度Vaと速度Vbの速度ベクトルの方向が列車の経路と一致していなく、方位がランダムに変動していることを示す信号を入力すると列車が停止していると判断することを特徴とする列車制御装置。
【請求項1】
2台のGPSアンテナと2台のGPS受信機及び車上装置を有し、
前記2台のGPSアンテナは、列車の前後に一定の設置間隔を隔てて設けられ、
前記2台のGPS受信機の一方のGPS受信機は、前記列車の前部に設けられたGPSアンテナに接続され、他方のGPS受信機は、前記列車の後部に設けられたGPSアンテナに接続され、
前記車上装置は、制御情報記憶部と演算処理部及び停止判定部を有し、
前記制御情報記憶部には、前記2台のGPSアンテナの設置間隔と列車が走行する経路情報があらかじめ格納され、
前記演算処理部は、前記2台のGPS受信機からそれぞれ出力する位置信号により速度Vaと速度Vbを算出するとともに前記2台のGPS受信機から出力する位置信号により前記2台のGPSアンテナ間の方位を算出し、算出した速度Vaと速度Vbがランダムに変動するかどうかと、算出した速度Vaと速度Vbが一致しているかどうかと、算出した速度Vaと速度Vbの速度ベクトルの方向が前記情報記憶部に記憶した列車の経路と一致しているかどうかと、算出した方位がランダムに変動するかどうかを判定して前記停止判定部に出力し、
前記停止判定部は、前記演算処理部から入力する速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になって、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致していなく、速度Vaと速度Vbの速度ベクトルの方向が列車の経路と一致していなく、方位がランダムに変動していることを示す信号を入力すると列車が停止していると判断することを特徴とする列車制御装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−122903(P2011−122903A)
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願番号】特願2009−279988(P2009−279988)
【出願日】平成21年12月10日(2009.12.10)
【出願人】(000001292)株式会社京三製作所 (324)
【Fターム(参考)】
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願日】平成21年12月10日(2009.12.10)
【出願人】(000001292)株式会社京三製作所 (324)
【Fターム(参考)】
[ Back to top ]