
国際特許分類[G01S19/50]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 衛星電波ビーコン測位システム;当該システムから送信される信号を用いた,位置,速度または姿勢の決定 (1,115) | 衛星電波ビーコン測位システムの送信信号を用いた,航法解の決定 (298) | 衛星電波ビーコン測位システムがタイムスタンプメッセージを送信するもの,例.GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] , GALILEO (297) | 位置の決定 (226) | 位置解が特定の曲線または表面上に制限されるもの,例.線路上を動く物体のための (10)
国際特許分類[G01S19/50]に分類される特許
1 - 10 / 10
測位装置及びプログラム
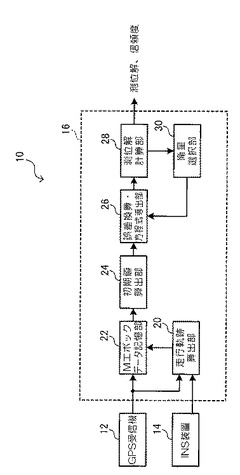
【課題】GPS情報とINS情報とを統合して測位する場合に、測位解の信頼度を精度良く計算する。
【解決手段】走行軌跡算出部20で、Mエポック分のGPS情報及びINS情報に基づいて自車両の走行軌跡を算出し、初期値算出部24で、算出した走行軌跡に基づいて、Mエポック分の自車両の位置の初期値を算出する。誤差換算・方程式導出部26で、バンドルアジャストメント方式により、初期値に基づくGPS情報の観測方程式を導出すると共に、INS誤差を、各エポックにおける自車両から見たGPS衛星の方向に投影して擬似距離誤差に換算して、GPS誤差と統合する。測位解計算部28で、観測方程式から測位解を計算すると共に、統合された観測誤差に基づいて信頼度を計算する。
(もっと読む)
測位装置及びプログラム

【課題】一周波数GPS受信機を用いた場合でも、精度良く測位解を得る。
【解決手段】エポック毎にGPS受信機12で受信したGPS情報及びINS装置14で取得したINS情報を、Mエポックデータ記憶部22に記憶する。方程式導出部24は、M(3以上)エポック分のGPS情報及びINS情報を観測値とし、かつ複数のGPS衛星各々と自車両間におけるGPS情報の搬送波の波数Nのフロート解を、GPS衛星毎に求めるための観測方程式であって、波数Nのフロート解の範囲が、Mエポック分のINS情報に基づいて推定された自車両の走行軌跡で拘束された観測方程式を導出する。フロート解計算部26では、観測方程式を解いて、GPS衛星毎の波数N及び自車両の位置のフロート解を計算し、フィックス解計算部30では、GPS衛星毎の波数N及び自車両の位置のフロート解各々に基づいて、最も整合性が高いフィックス解を計算し、測位結果として出力する。
(もっと読む)
密結合GPSおよび推測航法車両航法用のロードマップ・フィードバック・サーバ
【課題】車両における全地球測位システム受信機および推測航法の密結合の組合せを無線ネットワーク・サーバによって行い、実用的なロードマップ補正フィードバックを実現する。
【解決手段】ロードマップ・フィードバックは、車両レンジおよび方向を演算するために、車両のCANbusネットワーク上の車輪速度トランスデューサのデータを収集する密結合GPSおよび推測航法システムにおいて使用される。ネットワーク・サーバによって提供される道路セグメント情報は、補正可能なフィードバックを導出することができるように、現在の航法解にテンプレートされた制約をデータベースに提供する。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解のギャップを埋める。ロードマップの適合は、長い推測航法単独の動作の期間に蓄積されるドリフトを制御する。
(もっと読む)
列車走行実績データ作成システム
【課題】計算処理負荷の小さな算出方法で鉄道網における各列車の走行実績データを作成する。
【解決手段】データベース部は、路線内の所定の基準点における緯度・経度情報、基準駅から基準点までの距離程および基準点から所望の誤差許容距離内で定義された判定エリアの緯度・経度情報を関連付けた判定エリアデータを記憶する。GPS測位データ補正部は、GPS測位データ受信部で受信された測位データの緯度・経度が判定エリアデータに含まれる場合、該当する判定エリアが対応する路線の距離程に列車が存在するものと判定して所定の補正演算を行い、現在時刻における列車の距離程および緯度・経度を含む補正測位データを作成する。走行実績データ作成部は、GPS測位データ補正部で作成された補正測位データを取得し、測位時刻と距離程の関係を示す走行実績データを列車毎に作成する。
(もっと読む)
ナビゲーション装置
【課題】GPS受信機に間欠的に電力を供給して定期的に測位をしなくても、ナビゲーション装置を起動した際にすぐに現在位置を表示すると共に経路探索を行うことができるナビゲーション装置を提供する。
【解決手段】本発明のナビゲーション装置は、任意の目的地を設定し目的まで経路案内することができるナビゲーション装置であって、現在位置を検出する現在位置検出手段と、ナビゲーション装置が起動された起動履歴を記憶する記憶手段と、記憶手段に保存された起動履歴から次にナビゲーション装置が起動する条件を予測する起動予測手段と、前記起動予測手段で予測された結果に基づいて前記現在位置検出手段の動作を制御する動作制御手段と、を備えたことを特徴とする。
(もっと読む)
電子機器及びプログラム
【課題】位置情報や移動速度を取得できない状況であっても、低コストかつ的確に目的物の設置位置に関する情報の報知を行なう。
【解決手段】データベースにはトンネル内速度測定装置eと装置eの位置へ至るトンネル内の道路上位置に設けた誘導点b,c,dの位置情報を記憶している。誘導点bはトンネル進入前のGPS受信器によって測位可能な位置から1km以内の位置に設定し、各誘導点間の距離も1km以内に設定している。トンネル進入点aで測位不能になる直前の現在位置から誘導点bに向けて測位不能になる直前の速度で進行しているものとして現在位置を更新していき、各誘導点位置に到達したら次の誘導点に向けて同様に現在位置を更新する。次の誘導点がない場合にはトンネル内速度測定装置へ向けて同様に現在位置を更新する。トンネル内速度測定装置eとの現在位置の関係が2km、1km、500mになった際にそれぞれ接近警報を発する。
(もっと読む)
測位装置、測位方法、及び、プログラム
【課題】 電車による移動を含む移動経路の軌跡を精度良く取得することのできる低消費電力の測位装置、測位方法、プログラムを提供する。
【解決手段】
現在位置を測定する絶対位置測定手段(15)と、絶対位置測定手段の動作タイミングを制御して非連続的に現在位置を測定させる測位制御手段(10)と、動作の計測を行う移動計測手段(15、16)と、移動計測手段の計測結果に基づいて動作種別の判定を行う動作内容判別手段(21)と、鉄道路線図の情報を記憶する地図データ記憶手段(13a)と、絶対位置測定手段により測定された位置情報、及び、鉄道路線図の情報に基づいて、動作内容判別手段により列車移動状態であると判定された期間の移動経路を判別する移動経路判別手段(10)と、を備える。
(もっと読む)
列車位置検出装置
【課題】簡単な構成で列車の走行位置を車上で高精度に検出する。
【解決手段】速度発電機3からの信号によるTG位置とGPS受信機4からのGPS位置を比較して列車の位置を検出するとともに、検出した列車の位置を、加速度センサ5から出力する列車の上下振動信号と集音装置6から出力する音響信号の両方の波形特徴を抽出して車上装置2がレール継ぎ目や分岐部等の特異点を通過したときの特異点通過信号により補正して、GPS受信機4の測位精度が変化した場合、あるいは速度発電機3からの信号が車輪の空転や滑走などにより不正確になっても列車位置を補正して高精度に列車位置を検出する。
(もっと読む)
列車制御装置
【課題】GPSを利用して列車が停止しているかどうかを精度良く検出して列車の速度を制御する。
【解決手段】2台のGPS受信機3a,3bから出力する位置信号Pa,Pbから算出した速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になったとき、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致しなく、速度Vaと速度Vbの速度ベクトルの方向が列車1の経路情報と一致しなく、方位Dgがランダムに変動していることを検出したときに列車1が停止していると判定して、地上子やトランスポンダ等の地上設備を必要としないで2台のGPS受信機3a,3bからの位置信号Pa,Pbで列車1が停止していることを精度良く検出して地上設備を省略して設備費を低減する。
(もっと読む)
断続的に位置を報告するための方法および装置
断続的に位置を報告するためのシステム、装置、および方法を提供する。この装置は、全地球測位システム(GPS)の受信機(202)、トランシーバ(206)、およびコントローラ(212)を含む。トランシーバは、WiFiまたはWiMAXのトランシーバである。コントローラは、装置の現在の地理的位置を読み取り、位置監視アプリケーション(LMA)(312)との通信が可能であるか否かを決定する。LMAとの通信が可能ではない場合、コントローラは現在の地理的位置を記憶する。LMAとの通信が再び可能となるとき、コントローラは記憶したいずれかの地理的位置を送信する。コントローラは、地理的位置と関連するタイムスタンプを記憶することができる。コントローラは、あらかじめ定義されたルールによって決定される間隔で地理的位置をLMAに送信することができる。 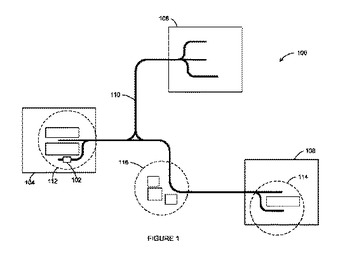 (もっと読む)
(もっと読む)
1 - 10 / 10
[ Back to top ]