
Fターム[5H115QN04]の内容
車両の電気的な推進・制動 (204,712) | 制御、演算 (10,339) | フィードバック制御するもの (3,031)
Fターム[5H115QN04]の下位に属するFターム
位置フィードバックするもの (199)
速度フィードバックするもの (1,195)
位相をフィードバックするもの (43)
電気的変量をフィードバックするもの (1,377)
制御系を切り換えるもの (59)
Fターム[5H115QN04]に分類される特許
1 - 20 / 158
素子寿命判定装置
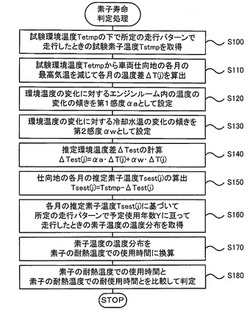
【課題】電気自動車の収納部に収納されたインバータのスイッチング素子の寿命をより適正に判定する。
【解決手段】試験素子温度Tstmpから環境温度差ΔTest(j)を減ずることにより仕向け地での推定素子温度Tsest(j)を算出する際の環境温度差ΔTest(j)は、複数の環境温度下で所定の走行パターンで走行したときの外気温Tzの変化量に対するルーム内温度Taの変化量の割合を反映する第1感度αaと、試験環境温度Tstmpから仕向け地の最高気温を減じて得られる温度差ΔT(j)との積と、同じく外気温Tzの変化量に対する冷却水温Twの変化量の割合を反映する第2感度αwと、温度差ΔT(j)との積との和として算出される(S140)。これにより、仕向け地での推定地素子温度Tsest(j)をより適正に算出することができる。
(もっと読む)
電気自動車の制御装置

【課題】モータと変速機を備えた電気自動車において、クラッチを不要にして構成を簡易にすると共に、重量やコストの増加を抑制するようにした電気自動車の制御装置を提供する。
【解決手段】少なくとも運転者に操作されるアクセルペダルの開度に応じて車両に搭載されるモータの出力を制御するモータ出力制御手段と、変速指示がなされたとき、複数個の変速段ギヤを切り替える噛み合い式クラッチを有する変速機と、車両を制動可能な機械的なブレーキの動作を制御するブレーキ制御手段とを備えた電気自動車の制御装置において、モータ出力制御手段は、モータを回生させている間に変速指示がなされたとき(S10,S12,S18)、噛み合い式クラッチが複数個の変速段ギヤを切り替える前にモータの出力を零あるいはその近傍からなる所定値に制御すると共に(S22)、ブレーキ制御手段にブレーキを作動させる(S20)。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電気システム内部での過電圧等の電圧異常の発生を防止することによって走行距離を確保することである。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、MG1およびMG2のトルク上下限範囲に基づいて、MG1およびMG2の出力トルクによって発生できる電力線54の電力変化量の上下限範囲を設定するとともに、電力線54の電圧VHを電圧指令値に近付けるために必要な前記電力変化量の指令値を算出する。HVECU70は、さらに、指令値と上下限範囲との比較に基づいて、MG1およびMG2の出力トルクによる電力制御の可否を判定する。
(もっと読む)
電気自動車の制御装置
【課題】モータと変速機を備えた電気自動車において、モータと変速機を接続するクラッチを不要にして構成を簡易にすると共に、重量やコストの増加を抑制するようにした電気自動車の制御装置を提供する。
【解決手段】車両に搭載されるモータと、少なくとも運転者に操作されるアクセルペダルの開度に応じてモータの出力を制御するモータ出力制御手段と、変速指示がなされたとき、複数個の変速段ギヤを切り替える噛み合い式クラッチを有する変速機とを備えた電気自動車の制御装置において、モータ出力制御手段は、変速指示がなされたとき(S12)、噛み合い式クラッチが前記複数個の変速段ギヤを切り替える前に(S20からS26)、モータの出力を零あるいはその近傍からなる所定値に制御する(S18)。
(もっと読む)
ハイブリッド車両
【課題】気筒間空燃比ばらつき異常の検出精度を確保する。
【解決手段】多気筒内燃機関および電動機と、内燃機関の気筒間空燃比ばらつき異常を検出する検出手段と、車両を内燃機関および電動機の両方で駆動させるハイブリッド(HV)モードおよび車両を内燃機関のみで駆動させるエンジンモードを実行可能な制御手段とを備える。制御手段は、HVモードのとき所定の動作線b1上を内燃機関の実際の動作点c11が移動するよう内燃機関および電動機を制御し、HVモード実行中に所定の変更要求があったとき動作線をb2に変更してエンジンモードに移行し、且つHVモード実行中にばらつき異常検出が未実行または実行中であるとき動作線の変更およびエンジンモードへの移行を禁止してハイブリッドモードを維持する。
(もっと読む)
非接触給電設備の2次側受電回路
【課題】効率が良く、低電圧による定電流制御、または定電圧制御が可能な非接触給電設備の2次側受電回路を提供することを目的とする。
【解決手段】同一のコアに巻かれ1次側の給電コイル17より起電力が誘起される第1コイル32および第2コイル33と、第1コイル33と共振回路37を形成する共振コンデンサ38と、共振コンデンサ38の両端を接続状態と開放状態に切り換えるスイッチング素子39と、共振回路37の出力電圧のゼロクロス点を検出するゼロクロス検出回路40と、第2コイル33から出力される電流を電池22へ出力する整流回路41と、電池22へ出力される電流と基準電流とを比較して、駆動パルスのパルス幅を制御し、前記ゼロクロス点に同期してスイッチング素子39ヘ駆動パルスを出力し、電池22へ出力される電流を基準電流に一定に制御する定電流制御機能を有するパルス発生回路45を備える。
(もっと読む)
側輪付二輪電動車
【課題】 操縦者の予期せぬタイミングで発進することを防ぐことができる二輪電動車を提供する。
【解決手段】 前後輪と、該後輪の両側に上下動可能に取付けられた側輪と、該側輪を路面に付勢する懸架装置とを備え、前後輪の少なくとも何れか一方が電動駆動される二輪電動車において、後輪の上下位置を検知する上下位置検知手段と、該上下位置検知手段の検知結果を基に前後輪の少なくとも何れか一方の電動駆動を制御する駆動制御手段とを備え、懸架装置は、操縦者が乗車していなければ後輪を路面から離間させるように付勢力が設定され、上下位置検知手段は、後輪が路面に接地した接地位置及び後輪が路面から離間した離間位置の少なくとも何れか一方を検知可能に構成され、駆動制御手段は、後輪が路面から離間している否かを判断し、前後輪の少なくとも何れか一方の駆動を許可する否かを判断するように構成している。
(もっと読む)
倒立振子型移動体
【課題】搭乗者の意思に基づく走行指令に従ってバランスを保ちながら走行制御が行われる倒立振子型移動体において、搭乗者の意思に基づく操縦モードと、搭乗者の意思に基づかない自動運転モードとを実現することができる倒立振子型移動体を提供する。
【解決手段】搭乗者の意思に基づく走行指令に従ってバランスを保ちながら車体の走行制御が行われる倒立振子型移動体において、制御装置から出力される操作信号に従って搭乗者の重心位置を調節するための重心位置調節手段を備え、制御装置は、搭乗者の意思に基づかないで所定の走行制御を行う自動運転モードへの切り換え指令が生成されたときに、目標となる走行状態が実現される重心位置となるように重心位置調節手段を制御し、重心位置に基づく走行指令に従って車輪駆動手段の制御を行う。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】ハイブリッド電気自動車の制御装置において、モータのトルク制御を用いて駆動輪のスリップの抑制を行なう場合に、該モータトルク制御を適切に終了させるようにする。
【解決手段】走行駆動源としてのエンジン1及びモータ3と、エンジンとモータとの間に介装されたクラッチ2と、駆動輪8の実スリップ率を算出するスリップ率算出手段60bと、駆動輪8のスリップが検出されたら、クラッチの断接状態と、車両の走行状態に基づいて、駆動輪の目標スリップ率を設定するとともに、駆動輪のスリップが検出されたら、実スリップ率が目標スリップ率になるようにモータの出力トルクを制御し、この制御中に、実スリップ率が安定したら制御を緩やかに終了し、ドライバの加速要求があったら制御を速やかに終了する出力トルク制御手段60eとを備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】第1締結要素を解放する際に、第2締結要素の発熱量を抑制しつつ、エンジンの吹き上がりを抑制することができるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEを駆動しつつ、第1締結要素CL1を締結し、第2締結要素CL2をスリップ制御している状態から、第1締結要素CL1を解放する際に、目標エンジントルクが設定値以下となってから第1締結要素CL1を解放するまでの待ち時間を、第2締結要素CL2の温度が高いほどおよび/または目標駆動トルクが大きいほど短く設定するようにした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】車両負荷が所定値以上である場合における、第2摩擦締結要素の過熱を防止しながら、内燃機関の暖機を適切に行なうことができるハイブリッド車両の制御装置を提供すること。
【解決手段】車両負荷を検出する車両負荷検出手段64と、第2摩擦締結要素25の温度を検出する温度検出手段63と、車両負荷検出手段64により検出された車両負荷が所定値以上である場合に、内燃機関10を所定回転数で作動させたまま第1摩擦締結要素15を解放し、モータジェネレータ20を所定回転数よりも低い回転数として第2摩擦締結要素25をスリップ締結するモータスリップ走行制御を行う走行制御手段60と、を備え、走行制御手段60は、内燃機関10からの暖機要求がされている場合において、第2摩擦締結要素25の温度が所定温度未満である場合には、モータスリップ走行制御を禁止する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】モータジェネレータの回転数低下を抑制することができるハイブリッド車両の制御装置を提供すること。
【解決手段】モータスリップ走行制御とエンジン使用スリップ走行制御とを切り換える際に、モータジェネレータMGの出力可能トルクの上限値から第2締結要素CL2のスリップ締結を維持するための差分トルクを差し引いた値を第2締結要素CL2の目標伝達トルク容量に設定するようにした。
(もっと読む)
車両の変速制御装置
【課題】自動変速機の変速過程のイナーシャフェーズにおける変速ショックの低減と応答性の向上との両立を図る。
【解決手段】モータを有する駆動源と駆動輪との間に有段式の自動変速機を介装する。この自動変速機による変速時には、摩擦締結要素の掛け替えを行うとともに、イナーシャフェーズでは、モータを目標回転数へ向けて回転数制御する。車速変化により変速が行われる第1変速パターンでは、変速ショックを低減するように、目標回転数の変化率を低く制限し(ステップS17,S19)、運転者のアクセル操作により変速が行われる第2変速パターンでは、応答性を重視して、第1変速パターンよりも目標変化率の変化率を高くする(ステップS18,S20,S21)。
(もっと読む)
車両の制駆動力制御装置
【課題】 従動輪の制動力および駆動輪の制駆動力を制御し、車両を適切に走行させるとともに車両の挙動を制御する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、センサ31,32,33から入力した各検出値に基づいて車両Veの挙動を制御するために各輪11〜14が発生すべき前後力Ffl,Ffr,Frl,Frrを演算する。ユニット30は、従動輪11,12側の前後力Ffl、Ffrの大きさを比較し、大きい方の前後力が駆動力であるか否かを判定する。そして、ユニット30は、大きい方の前後力が駆動力であるときにこの前後力を用いてオフセット前後力FOSを演算し、従動輪11,12の前後力Ffl、Ffrから前後力FOSを減算するとともに駆動輪13,14の前後力Frl,Frrに前後力FOSを加算して、左右前輪11,12および左右後輪13,14の目標前後力Fdfl,Fdfr,Fdrl,Fdrrを演算する。
(もっと読む)
電気自動車のトルク制御装置
【課題】シフトポジションをドライブレンジとリバースレンジとの間で切り替える際に、車体振動を抑制すると共に、逆方向に走行するまでの時間を短くし、且つ、出力トルクをスムーズに出力することができる電気自動車のトルク制御装置を提供する。
【解決手段】シフトレバー21のシフトポジションをDレンジとRレンジとの間で切り替える際に、このシフトポジション切り替え時の目標トルク値Taの絶対値を、モータ回転速度Nm及び駆動輪回転速度Nhが予め設定された境界モータ回転速度Nmo及び境界駆動輪回転速度Nho以上の場合には、一定の制限トルク値Toに制限して、この制限トルク値Toを、指示トルク値Tbとして演算する。
(もっと読む)
回生制御装置
【課題】回生制御を行っている場合のアップシフト時に制動力抜けを抑制する回生制御装置を提供する。
【解決手段】モータジェネレータと、モータジェネレータと駆動輪との間に配置される変速機とを備えた車両における回生制動を制御する回生制御装置であって、統合コントローラは、回生制御を実施しているかどうか判定し、変速機でアップシフトを行っているかどうか判定し、回生制御を実施し、かつ変速機でアップシフトを行っている場合に、イナーシャフェーズの解放側クラッチトルク容量を、回生制御を実施せずにアップシフトを行っている場合のイナーシャフェーズの解放側クラッチトルク容量よりも大きい値に設定する。
(もっと読む)
定速走行制御装置
【課題】定速走行制御装置では、手動運転における支援的な機能の場合、取り扱いによっては、手動運転と定速走行制御装置における自動制御を切り替える操作が発生するため、車両駆動制御装置の手動運転向けノッチ曲線を、ATO向けに切り替えずに用いて制御する必要がある。
【解決手段】定速走行制御装置において、目標速度204を複数の速度帯304に分割し、車両駆動制御装置の各ノッチの速度−引張力曲線301と、走行抵抗曲線302の交点303に基づいてそれらの速度帯304を設定し、その速度帯1〜5ごとにノッチを算出する制御計算を設定して制御に用いることで、目標速度204に追随して一定の速度で走行できる。
(もっと読む)
制御装置
【課題】走行抵抗トルク、又はブレーキトルクなどの外乱トルクをキャンセルすることなく、車両の動力伝達系に生じる軸ねじれ振動を抑制することができる回転電機の制御装置が求められる。
【解決手段】回転電機の回転速度ωmに基づき、動力伝達系の振動成分を低減するとともに、伝達系入力トルクTinを推定し、回転電機の出力トルクTmを減算して外部入力トルクTwを推定する外部入力推定器41と、外部入力トルクTwと、車両要求トルクTrとに基づいて、低振動回転速度ωm^を算出する低振動速度算出器42と、回転電機の回転速度ωmを低振動回転速度ωm^に一致させるようなフィードバック指令トルクTpを算出する回転速度制御器43と、出力トルク指令値Tmoを算出するトルク指令値算出器44と、を備える回転電機の制御装置。
(もっと読む)
車体制振制御装置
【課題】車体振動抑制用エンジントルク補正量が制御分解能未満でも、変速により、車体振動抑制用エンジントルクを補正制御する。
【解決手段】サスペンション装置を介して車輪を懸架された車両のバネ上質量である車体の振動を、駆動力補正制御により抑制するための車体制振制御装置において、車体振動を抑制するための制振用駆動力補正量を演算して、駆動力補正制御に資する制振用駆動力補正量演算手段と、該手段で求めた制振用駆動力補正量が設定値未満であるとき、駆動力の伝達系における変速比をハイ側へ変更する変速比変更手段とを具備する。
(もっと読む)
電動機制御システム、発電機制御システム、及び電動発電機制御システム
【課題】モータジェネレータ2を効率の高い領域で動作させ、効率を向上させる。
【解決手段】駆動発電制御システム1の駆動発電制御ユニット8には、モータジェネレータ2の効率に基づいて設定された回転数Nと目標トルクTcとに対応する発生トルクTpが記憶される。発生トルクTpは、効率の高い運転領域又は当該運転領域の近傍のトルクである。駆動発電制御ユニット8は、回転数Nと目標トルクTcとに対応する発生トルクTpを決定して、発生トルクTpに対する目標トルクTcの割合に応じて、モータジェネレータ2が発生トルクTpを連続的又は間欠的に発生するように動作させる。これにより、モータジェネレータ2は、発生トルクTpを連続的又は間欠的に発生して車両の走行又は制動に必要な目標トルクTcをプロペラシャフト14に供給する。
(もっと読む)
1 - 20 / 158
[ Back to top ]