
Fターム[5H115TD20]の内容
車両の電気的な推進・制動 (204,712) | 位置検出 (641) | その他の位置検出 (82)
Fターム[5H115TD20]に分類される特許
1 - 20 / 82
車載表示機器、表示方法、および、プログラム
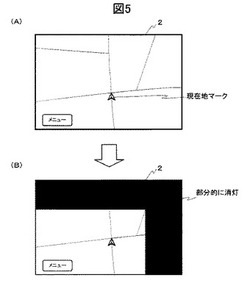
【課題】ナビゲーション装置の消費電力をなるべく抑える技術を提供する。
【解決手段】バッテリーを備える車両に搭載される車載表示機器であって、画像を表示する表示部と、バッテリーの電気残量が規定量以上であるか否か判定する電気残量判定部と、バッテリーの電気残量が規定量未満であると判定された場合には、当該車両における電力消費量を抑制する電力消費量管理部と、を備え、電力消費量管理部は、電力消費量を抑制するために、表示部に画像を表示するエリアを縮小する。
(もっと読む)
走行パターン計画装置

【課題】エンジンの再始動時における消費エネルギーを低減し、確実に燃費向上を図ることができる走行パターン計画装置を提供する。
【解決手段】走行パターン計画装置は、自車両前方の道路線形情報を取得し、その道路線形情報に基づいて、コーナー出口またはその手前においてスタータによりエンジンを再始動するような基本速度パターンと、コーナー入口手前において押しがけによりエンジンを再始動するようなコーナー入口押しがけ速度パターンとを生成する。そして、走行パターン計画装置は、自車両前方の道路線形情報及び自車両の車速に基づいて、コーナー入口手前の押しがけ地点から加速地点までの走行時間(アイドル回転時間に相当)が所定時間以下であるかどうかを判断し、コーナー入口手前の押しがけ地点から加速地点までの走行時間が所定時間以下であるときは、コーナー入口押しがけ速度パターンを採用する。
(もっと読む)
車載機器
【課題】電力で走行する車両のエネルギー効率の良さをわかりやすく表示する車載機器を提供する。
【解決手段】電力で走行する車両に搭載された車載機器において、バッテリー充電時の電力料金に基づいて電力走行時のコストを算出する電力走行コスト算出部と、バッテリー充電時のガソリン価格に基づいてガソリンをエネルギー源にして走行したときのコストを推定するガソリン走行コスト推定部と、を備え、電力走行時のコスト61とともに、ガソリン走行時の推定コスト62を表示する。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】目的地に到達した時点でバッテリのSOCを確実に確保でき、もって目的地で静粛性の高いモータ走行を行って騒音による周囲への迷惑を未然に防止できるハイブリッド電気自動車の制御装置を提供する。
【解決手段】電動機2の出力確保に重点をおいた高出力バッテリ16に加えて、電動機2の長時間駆動に適するエネルギ密度が高い高容量バッテリ17を搭載し、この高容量バッテリ17のSOCに基づき、高容量バッテリ17によるモータ走行で目的地での宅配を完了可能か否か判定し(ステップS8)、宅配を完了可能なときには、可能な限りEVモードによるモータ走行を継続しながら(ステップS12)、高容量バッテリ17のSOCが不足する場合には適宜HEV充電モードを実行して高容量バッテリ17を充電し(ステップS16)、これにより車両が宅配地域に侵入した時点での高容量バッテリ17のSOCを確保する。
(もっと読む)
鉄道車両用異常診断システム
【課題】鉄道車両に取り付けられたセンサユニットからの検出信号に基づいて脱線、転覆、衝突等の重大事故の異常を判定する異常判定装置に、定期検査で行われるような車両や軌道の異常を検知し処理する機能を付加した鉄道車両用異常診断システムを提供する。
【解決手段】先頭車両25及び最後尾車両26に加えて、中間車両27にも、6軸センサ50を備え、その測定値を車輪回転速度やGPS信号とともにMPU53で演算し、異常診断をする。脱線、転覆、衝突に至らなくても、定期検査で保守点検員の目視による調査や専用の異常診断装置によって行われていた車輪のフラット或いは車軸や軸受についての異常診断、乗り心地評価、或いは軌道の検査を、通常の営業車両で実行できるようになるため、人件費や設備投資の削減ができる。また、検査の頻度を格段に増やしてタイムリーに車両劣化診断を行うことができ、一層の安全向上を図ることができる。
(もっと読む)
電力制御システム、電力制御方法及び電力制御装置
【課題】最も安い電気料金の時間帯を過ぎても電気給湯機の湯が沸いていないことや、帰宅しても沸き上げ中であったため車載バッテリーへの充電開始時間が遅れてしまいなかなか充電が開始できず充電時間が不足し、朝になって使おうとしても電気自動車が動かないといった問題が生じる。
【解決手段】制御判定手段11は、車載バッテリー23の残量に関する情報から算出した充電に要する時間と、帰宅時間に関する情報とから判断して、安い電気料金時間帯(夜間電力帯)の終了時間を超えても車載バッテリー23への充電が完了しないと判断したとき、帰宅時間まで予め沸き上げ手段10における沸き上げを完了させる。
(もっと読む)
情報収集配信システム
【課題】充電設備に関する情報をリアルタイムに収集する。
【解決手段】情報収集配信センタ12は、充電スタンド11や充電設備を利用した車両の車載器から情報を収集する。本発明の一態様の情報収集配信システム1では、通信回線網16に接続されている充電スタンド11から、設置されている充電設備の設置状況や利用状況などの運営状況に関する情報を収集する。別の一態様の情報収集配信システムでは、充電設備を利用した車両から車両の位置や充電状況に関する情報を収集する。各態様における情報収集配信センタは、収集した情報に基づいて、充電スタンドの運営状況に関する運営情報を記憶し、車載器14などの車載器に配信する。
(もっと読む)
車両用給電装置
【課題】電力伝送効率を高く維持することのできる車両用給電装置を提供する。
【解決手段】この車両用給電装置は、系統電源10から送電コイル12への給電に基づきその共振周波数で振動する磁場を形成する。そして、送電コイル12が車両20に設けられている受電コイル21と磁気共鳴することで、系統電源10から送電コイル12に供給される電力を受電コイル21を介して車載バッテリ23に充電する。ここでは、第1及び第2のCCDカメラ14,15を用いて送電コイル12と受電コイル21との間の距離を計測するとともに、計測された各コイル12,21の間の距離に基づき周波数調整部30を通じて送電コイル12の共振周波数を調整する。
(もっと読む)
制御装置および制御方法
【課題】等速自在継手の作動角の全域において等速自在継手に対するモータからの過大入力による損傷を未然に防ぐことが可能で、しかも、作動角に大きい領域において等速自在継手性能を有効に活用することができる制御装置及び制御方法を提案する。
【解決手段】電気モータ2を動力源とし、電気モータ2からの動力をドライブシャフト6を介して駆動輪に伝達する車両における制御装置および制御方法である。ドライブシャフト6に用いられる等速自在継手の作動角全域で、ドライブシャフト限界トルク以下にドライブシャフト入力トルクを制限する。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保することが容易にできる電気自動車およびプログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、車体25の少なくとも旋回加速度を検出する加速度センサ25と、各車輪2のスリップ率を演算するスリップ率演算手段と、操舵角を検出する操舵角センサ29と、旋回加速度が操舵角に応じた旋回加速度となるように各車輪のスリップ率が所定の値を超えない範囲で電気モータ3の制駆動力を制御する制駆動力制御手段とを備える。
(もっと読む)
警告音出力装置
【課題】歩行者に対する警告を行いつつ、歩行者以外の人への不快感を低減する。
【解決手段】車両の進行方向より左側へ向けて警告音を出力するように配置された左側スピーカ16Lと、車両の進行方向より右側へ向けて警告音を出力するように配置された右側スピーカ16Rを備え、車両の現在位置および道路地図データに基づいて車両の走行道路が双方向通行道路であることを判定(S104でNOと判定)した場合、右側スピーカ16Rより警告音を出力させないようにし、左側スピーカ16Lより警告音を出力させる。
(もっと読む)
プラグイン車両の充電制御装置
【課題】無駄な充電を実行してしまうことがなく、しかも次回走行に必要な分の電力をなるべく安価に充電できるようにしたプラグイン車両の充電制御装置を提供する。
【解決手段】カーナビ1は、使用者が入力した翌日の到着予定時刻及び目的地に基づいて次の走行時に必要となる電力量を求め、翌日の天気情報及び日出・日没時間に基づいて次の出発予定時刻まで太陽光発電により最大限充電する充電スケジュールを作成し、当該充電スケジュールに従ってバッテリ4に対する充電を制御する。
(もっと読む)
電動車両および電力供給システム
【課題】充電中であっても走行することが可能な電動車両および電力供給システムを提供する。
【解決手段】車体11に搭載されたバッテリ15と、車体に設けられバッテリに外部電源27からの電力を充電する充電装置17と、を備えた電動車両10において、充電装置に外部電源が接続されたか否かを検出する接続検出部と、電動車両の走行を制御する走行制御部と、を有する制御装置16をさらに備え、制御装置は、接続検出部において充電装置に外部電源が接続されていると判定した場合に、走行制御部が走行を規制する。
(もっと読む)
電気自動車
【課題】非接触式の充電を行う受電部の配置自由度を向上しつつ正確且つ容易に受電部と給電部との位置合わせが可能な電気自動車を提供する。
【解決手段】走行モータ2と、走行モータ2へ供給される電力を蓄電する高圧バッテリ6と、床下に配置された受電コイル8と、車室内に設けられるモニタ17に車両の走行情報を表示するナビゲーションシステムとを備えた非接触充電式の電気自動車1において、受電コイル8近傍であって、床下に路面方向を向いて設置される床下カメラ12と、路上に配置される給電コイル9の接近を検知する接近検知手段と、接近検知手段により給電コイル9への接近を検知した場合に、モニタ17に床下カメラ12の映像を写すように切り換えるモニタ表示情報切り換え手段とを備えることを特徴とする。
(もっと読む)
充電制御システム
【課題】蓄電装置の蓄電量の不足を抑制することができる充電制御システムを提供すること。
【解決手段】車両に搭載され、車両の運動エネルギーを電気エネルギーに変換する回生装置と、回生装置により変換された電気エネルギーが充電される蓄電装置と、蓄電装置からの電力で作動する空調装置と、蓄電装置の蓄電量の目標値に基づいて回生装置を制御する制御装置とを備え、制御装置は、車両の前方の降坂路に対して(S2−Y)、降坂路を走行することにより走行位置の標高が変化した後の空調装置の消費電力を予測(S5)し、降坂路における蓄電量の目標値を予測された消費電力に応じた値とする(S6)。
(もっと読む)
車両制御装置及びハイブリッド車両
【課題】スピーカや音源発生装置を必要とせず、歩行者等に車両の接近を知らせる車両制御装置及びハイブリッド車両を得る。
【解決手段】現在位置を検出する位置検出部21と、地図データを記憶する地図データ記憶部22と、特定地域判定部23と、車両制御部27とを備える。特定地域判定部23は、位置検出部21からの現在位置及び地図データ記憶部22からの地図データから特定地域の走行を判定する。車両制御部27は、車両のエンジン10による駆動及びバッテリ15への充電の少なくともいずれかと電動機11による駆動とを制御する駆動制御部16からの情報が電動機11を用いた駆動であり、特定地域判定部23からの情報が特定地域を走行中の場合、駆動制御部16にエンジン10の出力を上昇させると共にエンジン10の余剰出力をバッテリ15に充電する制御信号を出力する。
(もっと読む)
車両の走行用モータ制御装置、車両用のモータ制御システム、及び回転検出装置
【課題】回転検出手段の検出誤差を適切に補正して車両の走行用モータの制御精度を向上させる。
【解決手段】回転検出手段からの信号を入力して誤差を補正した角度データ(以下、φ)をマイコンに出力する誤差補正部は、上記信号に基づく実際の検出角度(実検出角度)が45度間隔の角度になる毎に、その時の推定角度から実検出角度を引いた推実差分a1〜a8を算出し、実検出角度が最終の360度になった時に、推実差分a1〜a8に基づいて、45度間隔の各区間について、推定角度の増加量が実検出角度に対しどれだけ多かったかを示す増加量差分b1〜b8を算出し、更に、360度での推実差分a8を極力均等に分割して増加量差分b1〜b8から減じることで学習値d1〜d8を求める。そして、実検出角度の1増加時毎にφの値も基本的に1増加させるが、各区間でのφの増加量がその区間の学習値だけ多くなるように、φの増加時毎の増加量を2又は0にする。
(もっと読む)
車両用充電システム
【課題】家屋側での防犯コストをより抑えながらも、より高い盗電防止性を確保することを可能にする。
【解決手段】外部充電車両2に設けられる車載充電制御装置10と、屋内コンセント4に着脱自在に取り付けられ、商用電力線6と電気的に接続される屋内装置20とを含み、車載充電制御装置10は、外部充電車両の固有IDと現在の位置情報とを商用電力線6を介したPLCによって屋内装置20に送り、屋内装置20はこの固有IDおよび位置情報をもとに認証を行なう。そして、認証が成立した場合には、外部充電車両2側に備えられた充電切り替え部を電力供給許可状態とする一方、認証が成立しなかった場合に、上記充電切り替え部を電力遮断状態とする。
(もっと読む)
踏切保安装置
【課題】地上設備を簡略化して設置費用を低減して踏切制御の適正化を図る。
【解決手段】列車2に搭載された車上装置3は、常時、GPS受信機8でGPS衛星15から送信されて電波を利用して列車2の位置(緯度・経度)と時刻を得て各踏切6に対する踏切到着予定時間をセンタ装置4に送信する。センタ装置4は車上装置3から踏切到着予定時間を受信するときGPS受信機22から入力する時刻により時間同期し、受信した踏切到着予定時間を各踏切6に設けられた踏切制御装置5に送信する。踏切制御装置5はセンタ装置4から踏切到着予定時間を受信するときGPS受信機32から入力する時刻により時間同期し、受信した踏切到着予定時間とGPS受信機32から入力する時刻により警報開始時間や警報終了時間を決定して踏切制御を行う。
(もっと読む)
列車制御装置
【課題】GPSを利用して列車が停止しているかどうかを精度良く検出して列車の速度を制御する。
【解決手段】2台のGPS受信機3a,3bから出力する位置信号Pa,Pbから算出した速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になったとき、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致しなく、速度Vaと速度Vbの速度ベクトルの方向が列車1の経路情報と一致しなく、方位Dgがランダムに変動していることを検出したときに列車1が停止していると判定して、地上子やトランスポンダ等の地上設備を必要としないで2台のGPS受信機3a,3bからの位置信号Pa,Pbで列車1が停止していることを精度良く検出して地上設備を省略して設備費を低減する。
(もっと読む)
1 - 20 / 82
[ Back to top ]