
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
1 - 20 / 843
移動体の向きを特定する方法、及び移動体の向きを特定するシステム
速度推定装置及びプログラム
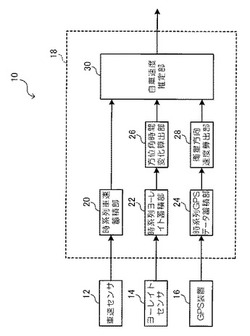
【課題】観測衛星数が少ない環境でも、安定して精度良く移動体の速度ベクトルを推定する。
【解決手段】車速データVtwheel、ヨーレイトデータωt、及びGPSデータを時系列に取得し、各々を時系列車速蓄積部20、時系列ヨーレイト蓄積部22、及び時系列GPSデータ蓄積部24に保存する。方位角時間変化算出部26で、時系列のヨーレイトデータωtに基づいて、方位角の時間変化θtgyroを算出し、衛星方向速度算出部28で、衛星方向速度Vstiを算出する。自車速度推定部30で、GPSデータに基づいて速度ベクトルを推定するための方程式であって、時刻毎に変化する未知パラメータの時間変化分を、方位角の時間変化及びクロックドリフトの時間変化で拘束した方程式に、観測値を代入して、時刻数×各時刻の観測衛星数分の方程式を立式し、得られたパラメータを用いて、自車両の速度ベクトルを推定する。
(もっと読む)
測位装置及びプログラム

【課題】一周波数GPS受信機を用いた場合でも、精度良く測位解を得る。
【解決手段】エポック毎にGPS受信機12で受信したGPS情報及びINS装置14で取得したINS情報を、Mエポックデータ記憶部22に記憶する。方程式導出部24は、M(3以上)エポック分のGPS情報及びINS情報を観測値とし、かつ複数のGPS衛星各々と自車両間におけるGPS情報の搬送波の波数Nのフロート解を、GPS衛星毎に求めるための観測方程式であって、波数Nのフロート解の範囲が、Mエポック分のINS情報に基づいて推定された自車両の走行軌跡で拘束された観測方程式を導出する。フロート解計算部26では、観測方程式を解いて、GPS衛星毎の波数N及び自車両の位置のフロート解を計算し、フィックス解計算部30では、GPS衛星毎の波数N及び自車両の位置のフロート解各々に基づいて、最も整合性が高いフィックス解を計算し、測位結果として出力する。
(もっと読む)
密結合GPSおよび推測航法車両航法用のロードマップ・フィードバック・サーバ
【課題】車両における全地球測位システム受信機および推測航法の密結合の組合せを無線ネットワーク・サーバによって行い、実用的なロードマップ補正フィードバックを実現する。
【解決手段】ロードマップ・フィードバックは、車両レンジおよび方向を演算するために、車両のCANbusネットワーク上の車輪速度トランスデューサのデータを収集する密結合GPSおよび推測航法システムにおいて使用される。ネットワーク・サーバによって提供される道路セグメント情報は、補正可能なフィードバックを導出することができるように、現在の航法解にテンプレートされた制約をデータベースに提供する。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解のギャップを埋める。ロードマップの適合は、長い推測航法単独の動作の期間に蓄積されるドリフトを制御する。
(もっと読む)
ナビゲーション装置
【課題】屋内送信機から送信された位置情報を受信した際にも、精度良くユーザーに違和感の少ない現在位置を表示できるナビゲーション装置を提供する。
【解決手段】GPS受信機1が算出した位置がGPS衛星を受信して算出した位置なのか、屋内送信機から送信される位置情報を受信したのか判定するGPS種別判定部21と、GPS受信機1からの位置情報および方位検出装置3で算出される方位と、速度検出装置4で算出される速度と、記憶装置5で記憶される地図データベースを用いて位置を決定する測位部23と、屋内送信機から送信される位置情報について、その位置情報が示す場所を走行した時刻を推定する屋内位置推定部22を備え、測位部23は該推定された時刻および屋内送信機から受信した位置情報を用いて決定した位置を補正する。
(もっと読む)
衛星電波受信装置
【課題】回路規模を大型化せずに測位衛星からの電波受信時間を短縮する衛星電波受信装置を提供する。
【解決手段】A/D変換された受信電波信号のデジタルデータから所定の受信周波数の衛星信号の検出演算を行う検出演算手段と、検出演算手段に1データサンプル当たり第1のビット数で1の受信周波数ずつ順番にデータ取得、演算を行わせて衛星信号の検出周波数を検索する捕捉手段と、検出された衛星信号の受信強度に応じた第1のビット数以下の第2のビット数及び検出演算手段による並列処理数を設定する設定手段と、検出演算手段に1データサンプル当たり第2のビット数で並列処理数個の受信周波数ずつ並列にデータ取得、演算を行わせて衛星信号の受信周波数を特定する特定手段と、を備え、並列処理数は、検出演算手段の最大並列処理数以下且つこの並列処理数個のデータサンプルの合計ビット数が最大ビット数以下とする。
(もっと読む)
情報処理装置、情報処理方法、並びにプログラム
【課題】精度を向上させた位置情報の記憶を行う。
【解決手段】自己の位置を測位する測位部と、測位部により測位された位置情報を記憶する記憶部と、測位部による測位が行えていないと判断される場合、測位が行えない第1の時間内で移動した距離を予想する予想部と、予想部で予想された距離が、第1の時間に対応する閾値を超えたか否かを判断し、距離が閾値を超えたと判断された場合、記憶部に記憶されている最新の位置情報を、記憶部からクリアするように制御する制御部とを備える。本技術は、ナビゲーションシステムに適用できる。
(もっと読む)
測位システム、測位端末装置および測位方法
【課題】測位端末装置が取得した測位データをその都度測位サーバに転送せず、測位サーバが所定のタイミングで転送される測位データに基づいて測位端末装置の測位を精度よく行う。
【課題手段】1秒以内の精度を有する時計と、トリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定する衛星受信機と、各同期タイミングのデータと時計から得られる各同期タイミングの測定時刻を記憶するメモリと、該メモリの情報を所定のタイミングで外部に出力する手段とを有する測位端末装置と、測位端末装置における測位期間のすべての時間について衛星からすべての衛星情報を取得しておき、測位端末装置のメモリから受け取った同期タイミングのデータと、測位端末装置の測定時刻における衛星情報に基づき、測位端末装置の位置情報を演算する測位サーバとを備える。
(もっと読む)
走行軌跡記憶装置
【課題】車両の絶対軌跡をより正確に生成する。
【解決手段】カーナビゲーション装置10は、修正測位軌跡生成処理部26によって、測位軌跡生成処理部22が生成した測位軌跡を修正した修正測位軌跡を生成し、修正推測航法軌跡生成処理部27によって、推測航法軌跡生成処理部25が生成した推測航法軌跡を修正した修正推測航法軌跡を生成し、絶対軌跡生成処理部28によって、修正測位軌跡生成処理部26が生成した修正測位軌跡と修正推測航法軌跡生成処理部27が生成した修正推測航法軌跡とを合成した絶対軌跡を生成し、この絶対軌跡を記憶する。
(もっと読む)
無線ロケーション・システムにおいてTDOAおよびFDOAを推定するための方法の改良
【課題】位置検出対象信号の存在を試験する周波数および時間期間を限定するために、到着時間差および/または到着周波数差を判定する方法に関する。
【解決手段】移動送信機の位置を検出する際に用いる方法は、相互相関値の集合を求めることを含み、各相互相関値には、対応するTDOAおよび/またはFDOA推定値が関連付けられており、基準信号を協同信号と相関付けることによって求める(図5)。基準信号は、移動送信機が送信し第1アンテナにおいて受信した信号のコピーから成り、協同信号は、第2アンテナにおいて受信した同じ信号のコピーから成る。本方法は、更に、TDOAおよび/またはFDOA推定値の最尤範囲を決定し、次いでTDOAおよび/またはFDOA推定値の最尤範囲に対応する相互相関値の部分集合(図10)内において最適な相互相関値を特定することを含む。次に、最適な相互相関値に対応するTDOAおよび/またはFDOA値を用いて、移動送信機の位置を算出する。
(もっと読む)
信号捕捉方法、通信信号受信方法、GNSS信号受信方法、信号捕捉プログラム、通信信号受信プログラム、GNSS信号受信プログラム、信号捕捉装置、通信信号受信装置、GNSS信号受信装置、および移動端末
【課題】従来の方法よりも簡素な方法で素早く確実に、所望のGPS信号を捕捉できる信号捕捉方法を実現する。
【解決手段】暫定コード位相および暫定周波数で、ノンコヒーレント積算値NCiとコヒーレント積算Ciとを算出する(S103)。ノンコヒーレント積算値NCiとコヒーレント積算Ciとが共に検証用閾値より低い(S104:Yes)、もしくはノンコヒーレント積算値NCiが検証用閾値より高く、ノンコヒーレント積算値NCiとコヒーレント積算Ciとが同程度であれば(S105:Yes)、暫定コード位相および暫定周波数を真のコード位相および真の周波数に設定する(S107)。ノンコヒーレント積算値NCiが検証用閾値より高く、ノンコヒーレント積算値NCiとコヒーレント積算Ciとに所定強度以上の差があれば、コード位相を固定して再度捕捉処理を行い(S106)、真の周波数を検出する(S107)。
(もっと読む)
拡張SPS軌道情報を用いた位置特定のための方法および装置
【課題】移動局が衛星の場所を突き止めるのを支援する方法およびシステムの提供。
【解決手段】システム100は、場所支援サーバ130,データプロバイダ150,データプロバイダ110,データホスト160から構成される。場所支援サーバ130は、ネットワーク164を介して、リアルタイム軌道をデータプロバイダ150から受信する。また、ネットワーク162を介して、予想される軌道をデータプロバイダ110から受信する。サーバ130は、リアルタイム軌道及び予想される軌道から訂正データ140を作成する。訂正データ140は、データホスト160からネットワーク166を介して移動局120への送信する。
(もっと読む)
多重測位を用いた端末の測位装置及び方法
【課題】測位誤差を減らすと同時に、より強靭な測位結果を提供できる、多重測位を用いた端末の測位装置を提供する。
【解決手段】複数の測位方法を用いて測位を行う複数の測位部それぞれから端末に及ぼす磁場に基づいて前記端末の第1位置を推定する多重測位部と、前記端末の推定された第1位置に基づいて前記端末の第2位置を決定する位置決定部とを備える。好ましくは、複数の測位部各々に対する初期条件(例えば、測位開始時間及び測位方法各々の初期パラメータ)を制御することによって、様々な地域で同一又は類似の磁場の大きさ、パターン及び方向が連続しても端末の位置をより正確に測定できる。
(もっと読む)
長期コンパクト衛星モデル
【課題】長期コンパクト衛星モデルの構築方法の提供。
【解決手段】ネットワーク利用可能な拡張エフェメリス航法システムは、軌道上のGPS衛星からエフェメリス、クロック、およびアルマナック情報を収集することができ、その情報を少なくとも1週間有効で有用な拡張エフェメリス予測を構築するために使用するネットワーク・サーバを備えている。モバイル・クライアントは、そこから可視可能な軌道上のGPS衛星を探索および追跡するための拡張エフェメリス予測を要求し使用することができる。その改良は、衛星位置およびクロックのコンパクト・モデル構築およびデータベース・ユニットによって特徴づけられ、それは、モバイル・クライアントからの拡張エフェメリス予測の要求に応じて最初に送られるコンパクトな短期衛星モデルを構築し、また、少なくとも連続する7日間のうちの1日の固有部分をそれぞれ表わす幾つかの連続する長期衛星モデルを構築する。
(もっと読む)
測位装置
【課題】衛星の高速移動に伴う測位精度の劣化を招くことなく、電波源の正確な位置を測位することができるようにする。
【解決手段】複数の候補位置pc毎に、電波が衛星#1,#2に到来する時間τ1(t),τ2(t)を算出する移動補償量計算部2と、到来時間τ1(t),τ2(t)を用いて、衛星#1,#2の受信信号s1(t),s2(t)を補償する受信信号移動補償部3と、補償後の受信信号間の内積値cor(pc)を算出する内積値計算部4とを設け、複数の候補位置pcの中で、内積値計算部4により算出された内積値cor(pc)が最大になる候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力する。
(もっと読む)
変位計測システム
【課題】発信機からの電波を受信した複数の受信機からの受信信号の位相差の変化から発信機の変位を計測する変位計測部80と、予め受信した信号に基づく基準データと変位計測時の観測データとの相関係数が閾値より低い場合に、計測環境変化の発生を検出する環境変化検出部40を備えた変位計測システムにおいて、計測環境変化による誤検出を抑制し、計測精度の向上を図り、連続性を保持できる。
【解決手段】計測環境変化を検出した場合に、計測環境変化による位相誤差を校正する校正処理部50と、予め初期の校正を保持する初期校正データ部60と、直近の観測受信信号から直近校正データを生成・更新する直近校正データ部70とを備え、計測環境変化を検出した場合に、初期校正データ部と直近校正データ部の校正データを切替えて校正処理を行ない、校正後の受信信号の受信位相の組合せから受信位相差を算出する。
(もっと読む)
対象の一つ以上の運動パラメータを得るための計算機、システム、方法およびコンピュータ・プログラム
【課題】前方散乱レーダーを使用して、飛行する対象の距離パラメータまたは速度を含む対象の軌道を決定する。
【解決手段】対象の運動パラメータ26を得るための計算機20であって、計算機20は、少なくとも2つの時間差で一つ以上の運動パラメータ26を得るように構成される。第1の時間差は対象による送受信機ラインの第1の組の通過のタイミングを示し、第2の時間差は対象による送受信機ラインの第2の組の通過のタイミングを示し、送受信機ラインの第2の組は送受信機ラインの第1の組とは異なる。
(もっと読む)
測位支援装置及び測位支援方法
【課題】より適切な誤差半径情報が含まれる概位置情報を提供する。
【解決手段】測位支援システム10及び測位支援システム10を含む測位システム1による測位方法(測位支援方法)によれば、SUPLサーバ20において、他の通信網である移動体通信網N2から取得した基地局装置70の位置情報(概位置情報)に含まれる誤差半径が所定の範囲内にあるかを判断し、所定の範囲外である場合には誤差半径を予め定められた値に更新した後に、更新後の誤差半径情報が含まれる概位置情報を測位演算のために通信端末60に対して送信する。したがって、測位演算のために、より適切な誤差半径情報が含まれる概位置情報を提供することが可能となる。
(もっと読む)
バイアスがかかった測定値に基づいた衛星航法システムの誤り検出
【課題】本明細書で開示される例示的な実施形態は、衛星航法システム用の受信機において誤りを検出するための方法を提供する。
【解決手段】方法は、位置解に対応する複数の測定残差を計算するステップと、検定統計量を形成するために、複数の測定残差を結合するステップとを含む。方法は、検定統計量に対応する閾値を計算するステップであって、フォールスアラームの所望の確率に対応する、可能な検定統計量の非心カイ2乗分布に属する値となるように、閾値を選択するステップを含む、ステップも含む。検定統計量は、閾値と比較され、検定統計量が閾値よりも大きい場合、位置解に誤りがあることを示すアラームを出力することと、位置解を廃棄することのうち、少なくとも一方を実行する。
(もっと読む)
携帯端末装置、速度算出方法及び速度算出プログラム
【課題】GPS情報が取得できない区間で、適切な車両の速度を算出すること。
【解決手段】GPS情報に基づく速度を取得する取得部と、速度から求められる加速度と、加速度センサのデータとの相関係数、相関値を算出する第1算出部と、GPS情報が受信不可の区間において、相関係数及び相関値と加速度センサのデータとを用いて加速度を算出する第2算出部と、第2算出部により算出された加速度と、区間の前後で取得された速度とを用いて、区間内の速度を算出する第3算出部と、を備える。
(もっと読む)
1 - 20 / 843
[ Back to top ]