
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
81 - 100 / 843
ローカルRTKシステムと、地域、広域、またはグローバル搬送波位相測位システムを組み合わせて利用する方法
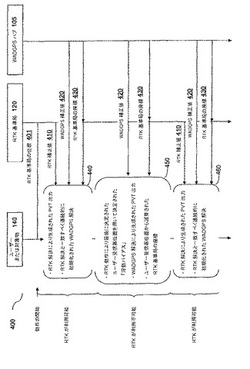
【課題】浮動バイアス値を短時間で決定する。
【解決手段】ローカルRTKシステムと、地域、広域、またはグローバル差分搬送波位相測位システム(WADGPS)を組み合わせて利用する。静止しているユーザー受信器の既知の位置を用いるか、あるいはユーザー受信器が移動中である場合、RTKシステムを用いてWADGPSシステムにおける浮動バイアス値を初期化する。その後、ユーザーGPS受信器において取得された屈折補正された搬送波位相測定値が、対応する初期浮動バイアス値を含めることにより調整され、後続の処理において浮動バイアス値が周知として扱われて、WADGPSシステム内でユーザー受信器を測位する。
(もっと読む)
GNSS受信機、航法装置、信号処理装置、GNSS速度補正プログラム及びGNSS速度補正方法

【課題】アンテナの動揺による速度測定値の誤差を遅延無く除去することが可能であり、しかも特別な設定作業等を行う必要が無いGNSS受信機を提供する。
【解決手段】本実施形態のGPS受信機2は、GPSアンテナ4と、GNSS位置・速度算出部11と、磁気方位センサ5と、傾斜センサ6と、動揺速度除去部15と、を備えている。GPSアンテナ4は、船舶に取り付けられ、GPS衛星からの測位用信号を受信する。GPS位置・速度算出部11は、測位用信号に基づいて、GPS速度を算出する。磁気方位センサ5は、船舶の船首方向の絶対方位を検出する。傾斜センサ6は、GPSアンテナ4の傾斜角を検出する。動揺速度除去部15は、絶対方位及び傾斜角に基づいて、GPSアンテナ4の動揺による誤差を算出してGPS速度から除去する。
(もっと読む)
位置推定装置、位置推定方法及びプログラム
【課題】高い精度で移動局の位置を推定する。
【解決手段】位置が既知である複数の基地局20と位置推定対象である移動局10との一方向又は双方向通信により取得した所定の信号に基づき、複数の基地局20と移動局10との観測距離を計測する距離計測部32と、距離計測部32により計測された複数の基地局20の観測距離に基づき、予め定められた移動局の推定初期位置40の方向に各基地局20の観測座標を決定する観測座標決定部34と、観測座標決定部34により決定された複数の基地局20の観測座標から移動局10の代表位置を移動局10の推定位置50として算出する推定位置算出部36と、を有する位置推定装置を提供する。
(もっと読む)
位置推定装置及びプログラム
【課題】精度よく移動体の位置を推定する。
【解決手段】車両に搭載される位置推定装置であって、GPS情報取得部20で、複数のGPS衛星の各々から発信された、各々のGPS衛星の軌道情報、GPS擬似距離データ、及びドップラー周波数情報を含むGPS情報を取得し、軌跡推定部40で、取得されたGPS情報に基づいて自車両の速度ベクトルを算出し、算出した速度ベクトルを所定時間分積算して自車両の軌跡を算出する。また、取得したGPS擬似距離データ及びGPS衛星の軌道情報から取得されるGPS衛星の位置座標を擬似距離・衛星位置記憶部に記憶しておく。そして、最適化位置推定部60で、自車両の軌跡上のエポック毎の各GPS衛星との距離と、そのエポックにおける擬似距離との擬似距離差分の全GPS衛星の全エポック数分の和が最小となるように自車両の軌跡を平行移動させて移動体の位置を推定する。
(もっと読む)
オブジェクトの絶対配置パラメータの決定方法、そのコンピュータプログラムおよび制御設備
【課題】センサによって供給される相対位置パラメータに基づいて、オブジェクトの絶対位置を決定する。
【解決手段】オブジェクトの集合のうちの2つのオブジェクト間の相対配置パラメータをそれぞれ取得するステップ(210;210*)と、受信したそれぞれの相対配置パラメータに相対配置パラメータの信頼性と呼ぶ値を関連付けるステップ(211;211*)と、相対配置パラメータの信頼性に応じて、作業用部分集合を選択するステップ(214;214*)と、作業用部分集合に属するオブジェクトと作業用部分集合外のオブジェクトとの間の新たな相対配置パラメータをそれぞれ決定するステップ(230;230*)と、決定した新たな相対配置パラメータのそれぞれに、作業用部分集合のオブジェクトの相対配置パラメータの信頼性に基づいて計算した信頼性を関連付けるステップ(232;232*)のループ(212;212*)を少なくとも1回実施する。
(もっと読む)
位置検知プログラム、位置検知装置および位置検知方法
【課題】測位誤差によって位置情報の誤測位が発生しても、誤った位置情報に影響されずに正確に移動経路ごとに作業対象となった作業地を検知すること。
【解決手段】位置検知装置100は、連続した位置情報Pを複数個ごとにグループ化し、同一のグループに含まれる位置情報Pが示す作業地の多数派を真の作業地として採用する。そこで、位置検知装置100は、移動経路を誤差幅よりも十分に長くなる距離ごとに分割し(S11)、分割した移動経路に含まれる位置情報Pから作業地候補を特定する(S12)。したがって、グループ1では、位置情報P1〜P6が示す圃場A,Bが、グループBでは、位置情報P7〜P11が示す圃場Aがそれぞれ作業地候補となるため、位置検知装置100は、S12によって特定された作業地候補の中から、多数派となる作業地を作業中の作業地に決定する(S13)。
(もっと読む)
衛星測位システムの異常値検出装置、異常値検出方法及び異常値検出プログラム
【課題】観測環境に変化が生じたり、各データ間に時系列的な相関関係がある場合であっても、精度良く衛星測位システムの異常値を検出する。
【解決手段】異常値指標算出部11は、衛星測位システムの各人工衛星と受信機との間の擬似距離などの時系列データの各時刻における異常値指標を算出する。動的モデル構成部12は、一定期間において異常値指標から動的にモデルを構成し、その動的モデルに基づいて、時系列の異常値指標から変化点指標を算出する。変化点指標は、突発的に増減した時系列値が存在する場合、その時系列値が単発的な動的モデルからの外れ値であるのか、それとも入力データの動的モデル自体が変化しているのかを判断する指標である。異常値検出部13は、変化点指標を予め設定した閾値と比較し、変化点指標の値が閾値よりも大きければ、その時刻の変化点指標に対応する異常値指標を異常値として検出する。
(もっと読む)
伝搬経路推定システム及び伝搬経路推定方法
【課題】衛星から送信された電波が地表で反射され、当該反射波を衛星で受信するリモートセンシングの場合や、地上の送信源から送信された電波を衛星で受信して送信源の位置を推定するような場合に、電離層が与える影響を排して正確な伝搬経路を推定する伝搬経路推定システム及び伝搬経路推定方法を提供する。
【解決手段】複数の測位衛星10から送信される衛星信号を受信する1以上の受信機24を有する伝搬経路推定システムであって、衛星50に設けられ、地上から到来して電離層を通過した電波を受信するアレイアンテナ52と、電波の到来方位と仰角とを算出する信号処理装置59と、受信情報として衛星通信により地上に送信する通信データ処理装置60と、受信情報に基づいて、衛星50の位置等を算出する第2算出部と、電波の伝搬経路に対応する領域の電子密度を推定する第2電子密度推定部と、レイトレーシング手法によりアレイアンテナが受信した電波の伝搬経路を推定する伝搬経路推定部とを備える。
(もっと読む)
移動端末、処理装置及びプログラム
【課題】現在位置の取得精度を維持しつつ、省電力化を図る。
【解決手段】絶対位置取得部30が、歩き始めの地点、歩き始めの地点から一定距離L1だけ離れた地点、及び一定距離L2だけ離れた地点で端末本体10の絶対位置を取得し、現在位置取得部36が、当該絶対位置を用いて歩行経路補正部35により補正された歩行経路に基づいて、端末本体の現在位置を取得する。この場合、一定距離L1は、端末本体が移動する2点間の実際の方位と、当該2点において絶対位置取得部により取得される絶対位置から求められる2点間の方位との最大角度差が、所定範囲内となる2点間の距離であり、一定距離2は、端末本体が移動する2点間の実際の距離と、当該2点において絶対位置取得部により取得される絶対位置から求められる2点間の距離との最大距離差の実際の距離に対する割合が、所定範囲内となる2点間の距離とされている。
(もっと読む)
位置標定装置、位置標定装置の位置標定方法および位置標定プログラム
【課題】航法の最初から慣性計測装置のデータを高い精度で補正して高い精度で位置を標定できるようにすることを目的とする。
【解決手段】自己位置標定装置100は航法処理を2回行う。1、2回目の航法処理において、IMU処理部140はカルマンフィルタ150により算出されるIMU誤差推定値に基づいて慣性データを補正し、補正した慣性データに基づいて慣性航法により位置、姿勢および速度を算出する。カルマンフィルタ150はGPS処理部120またはODO処理部130により算出される残差に基づいてIMU誤差推定値を算出する。2回目の航法処理において、IMU処理部140は1回目の航法処理においてカルマンフィルタ150により算出されたIMU誤差推定値をIMU誤差推定値の初期値として用いる。IMU処理部140は2回目の航法処理で算出した位置、姿勢および速度を航法結果として出力する。
(もっと読む)
過剰遅延勾配を監視する地上システムおよび方法
【課題】衛星信号の水平遅延勾配を監視する処理機能部を提供すること。
【解決手段】処理機能部は、衛星差分モジュール、二重差分モジュール、および勾配推定器モジュールを含む。衛星差分モジュールは、互いに既知の幾何学的関係を有する少なくとも2つの基準受信機から、少なくとも2つの衛星の搬送波位相測定値を受け取る。衛星は、被監視衛星および少なくとも1つの他の衛星を含む。衛星差分モジュールは、被監視衛星からの信号と少なくとも1つの他の衛星からの信号との搬送波位相測定値の差分を決定する。二重差分モジュールは、少なくとも2つの基準受信機の対の間の二重差分を形成し、対の間の二重差分を基準受信機の既知の位置の差で補償し、二重差分を平均化する。勾配推定器モジュールは、被監視衛星に関する平均化された補償二重差分に基づいて水平遅延勾配の大きさを推定する。
(もっと読む)
電子密度推定装置及び電子密度推定方法
【課題】衛星から送信される信号による通過経路の電離層電子密度分布を推定する際に、既知の放送局からの信号を利用して3次元の電離層電子密度分布をより正確に推定する。
【解決手段】アレイアンテナが受信した電波の到来方位と仰角とを算出する第1算出部と、衛星信号の通過経路の総電子数を算出する総電子数算出部と、電子密度を推定する3次元空間を設定し当該3次元空間を複数の領域に分割する3次元電子密度推定空間設定部36と、領域毎の電子密度を推定する電子密度推定部38と、アレイアンテナが受信した電波のホップ数を算出するホップ数算出部39と、ホップ数に基づいて算出したアレイアンテナから送信源までの距離と実際の距離との差が所定のしきい値以下である場合に電子密度推定部による推定結果を正しいと判定する判定部41と、判定部41の判定結果に応じて電波の伝搬経路における電子密度を修正する修正部43とを備える。
(もっと読む)
位置推定方法および位置推定システム
【課題】送信手段が1つしかない環境でも、受信手段の位置を高い確率で推定することができる位置推定方法および位置推定システムを提供する。
【解決手段】送信手段から無線で送られてきた信号を受信した受信手段が、複数ある候補位置のいずれに位置しているのかを推定する位置推定方法であって、受信手段を各候補位置に配置して受信信号強度分布を取得するステップS1−1と、当該受信信号強度分布を位置指紋として記憶手段に格納するステップS1−2とを実行し、その後、受信手段を推定対象位置に位置させて受信信号強度分布を取得するステップS1−3と、ステップS1−3で取得した受信信号強度分布と、記憶手段に格納されている各候補位置の位置指紋との相関値を求めるステップS1−4と、相関値に基づいて各候補位置の中から推定対象位置に最も相関する候補位置を特定するステップS1−5とを実行する。
(もっと読む)
測位方法、測位プログラム、GNSS受信装置および移動端末
【課題】受信環境に応じた適する方法を選択し、可能な限り単純で高精度な測位演算を実行する。
【解決手段】各GNSS測位信号を捕捉、追尾し、各測位信号(受信信号)のC/Noを算出する(S101,S102)。各受信信号の確度を推定し、高確度な受信信号の数を取得する(S103)。高確度な受信信号の数が4個以上で、且つこれらの高確度な受信信号の最低C/Noが35dB以上であれば(S104:Yes→S105:Yes)、低確度な受信信号を排除して簡素なパラメータ設定で測位演算を行う(S106,S107)。高確度な受信信号数が4個未満、または、高確度な受信信号数が4個以上であっても最低C/Noが35dB未満であれば(S104:NoまたはS105:No)、確度に応じてパラメータ設定した測位演算を行う(S108,S107)。
(もっと読む)
信号捕捉方法及び信号捕捉装置
【課題】航法メッセージデータのビット長よりも長い相関積算時間に亘る相関処理を可能にするための新たな手法を提案すること。
【解決手段】GPS衛星から発信されたGPS衛星信号を受信した受信信号に対して相関演算が行われる。そして、GPS衛星信号に搬送されている航法メッセージデータのビット長(20ミリ秒)以上の所定の蓄積時間に亘る相関演算結果に対して、フーリエ変換を用いた周波数解析が行われる。そして、航法メッセージデータのビット長の2倍の周期時間である40ミリ秒に相当する特定周波数(25Hz)におけるパワー値が、周波数ゼロにおけるパワー値に加算され、特定周波数におけるパワー値が「0」にされた後、逆フーリエ変換によって相関値が再構成される。そして、再構成された相関値が積算され、当該積算相関値に基づいてGPS衛星信号が捕捉される。
(もっと読む)
GPS受信機の時刻決定方法
【課題】 ホットスタート時におけるTTFFを短くする。
【解決手段】 RTCの時刻から所定の範囲にある時刻を候補時刻とし、この候補時刻における衛星の位置をエフェメリスデータに基づいて算出し、算出した衛星の位置に基づいて、前回の測位位置と衛星との距離を算出する。続いて、算出した距離に基づいて、候補時刻に対する衛星からの送信時刻を算出し、送信時刻における衛星の位置を算出して、算出した衛星の位置と前回の測位位置とに基づいて衛星受信機間距離を算出する。次に、衛星受信機間距離の1ミリ秒以下の桁に対応する部分と、衛星から実際に受信した擬似距離の1ミリ秒以下の部分との差を擬似距離残差とし、各衛星の擬似距離残差を算出して測位させ、その測位位置での擬似距離残差を求め、その標準偏差が小さい候補時刻を割り出す。
(もっと読む)
周波数間バイアス推定装置及び周波数間バイアス推定方法
【課題】昼間と夜間との電離層の状態の違いを考慮してより正確な推定を可能とする周波数間バイアス推定装置及び周波数間バイアス推定方法を提供する。
【解決手段】複数の測位衛星から送信される衛星信号を受信する1以上の受信機を有し、衛星信号に含まれる測位情報を用いて位置情報を得る測位システムを利用する周波数間バイアス推定装置32であって、電離層電子密度モデル関数に基づき総電子数モデル値を算出するモデル値算出部34と、夜間に観測された衛星信号の観測値と総電子数モデル値とに基づいて第1受信機依存周波数間バイアスを推定する夜間観測データ処理部36と、昼間に観測された衛星信号の観測値と総電子数モデル値と第1受信機依存周波数間バイアスとに基づいて衛星依存周波数間バイアス補正量を算出するとともに、衛星依存周波数間バイアス補正量に基づいて第1衛星依存周波数間バイアスを推定する昼間観測データ処理部37とを備える。
(もっと読む)
位置特定システム、位置特定装置、位置特定方法及びプログラム
【課題】消費電力やコストを抑え、無線タグリーダーを常時設置せずとも物体に貼付した無線タグの位置を特定する。
【解決手段】位置特定システムは、空間1に配置された複数の無線タグのそれぞれの位置情報を記憶し、空間1に配置された位置情報が未知のRFIDタグ4と、複数の位置特定用RFIDタグ2のうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する無線タグリーダー5と、無線タグリーダー5により取得された、複数の位置特定用RFIDタグ2のうち少なくとも3つからの距離と、記憶された当該各位置特定用RFIDタグ2の位置情報とに基づいて、無線タグリーダー5の位置を特定し、無線タグリーダー5が空間1の複数の異なる位置にある場合に特定された各位置と、当該各位置からのRFIDタグ4の距離に基づいて、RFIDタグ4の位置を特定する。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測位精度を向上させること。
【解決手段】GNSS受信装置は、C/Aコードのレプリカ信号を生成し、該C/Aコードのレプリカ信号とGNSS衛星からの測位信号との同期をとることにより、C/Aコードの位相を求める第1の遅延同期ループ回路と、Pコードのレプリカ信号を生成し、該Pコードのレプリカ信号とGNSS衛星からの測位信号との同期をとることにより、Pコードの位相を求める第2の遅延同期ループ回路と、当該GNSS受信装置の移動速度に基づいて、C/Aコードの位相により得られる擬似距離に対する重み付けを設定する重み付け設定部と、該重み付けと、第1の遅延同期ループ回路により求められたC/Aコードの位相と、第2の遅延同期ループ回路により求められたPコードの位相に基づいて、擬似距離を求める擬似距離演算部と、該擬似距離に基づいて、測位を行う測位演算部とを有する。
(もっと読む)
関数の局所極大又は極小のパラメータを推定するための手順
【課題】関数の局所極大又は極小のパラメータを推定するための手順。
【解決手段】受信された信号から導出された相関関数の局所極大又は極小のパラメータを推定するための方法及びシステム。内挿された局所極大又は極小が、決定される。内挿オフセットは、その後、導出され、内挿された関数の局所極大又は極小の位置とサンプリングされた関数の局所極大又は極小の位置との間の差を備える。パラメータの推定値は、内挿オフセットから導出される。
(もっと読む)
81 - 100 / 843
[ Back to top ]