
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
281 - 300 / 843
測位方法、プログラム及び測位装置
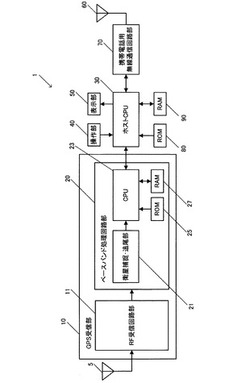
【課題】計測タイミングと出力タイミングとの時刻差に起因する測位精度の劣化を防止して、より真位置に近い位置が出力されるようにすること。
【解決手段】GPS衛星信号に基づいて携帯型電話機1の現在位置及び速度ベクトルが間欠的に計測される。そして、計測時刻と測位結果の出力時刻との時刻差が算出され、計測された位置と計測された速度ベクトルと算出された時刻差とを用いて、出力時刻における位置が推定される。そして、推定された位置を用いて出力位置が決定されて出力される。
(もっと読む)
移動体用測位装置

【課題】測位結果と他のセンサの検出結果とを精度良く同期させることができる移動体用測位装置の提供。
【解決手段】基準時刻における移動体の位置及び速度を測位する測位手段と、移動体の状態を検出する状態検出センサと、状態検出センサの検出結果をクロック周期で伝送する伝送路と、同期手段とを備え、同期手段は、複数のクロック周期に亘った状態検出センサの各検出結果のうちから、同期させるべき検出結果を特定する第1同期手段と、基準時刻を推定する推定手段と、第1同期手段により特定された検出結果が検出された検出時刻と、基準時刻との時間差を算出する時間差算出手段と、算出した時間差と、基準時刻における移動体の位置及び速度の測位結果とを用いて、検出時刻における移動体の位置を補間により算出し、該移動体の位置の算出結果と、第1同期手段により特定された検出結果とを対応付ける第2同期手段とを備える。
(もっと読む)
測位装置、通信システム及び測位方法
【課題】測位時点での電波環境の影響による伝播誤りに起因した測位誤差を適正に補正し、測位結果の信頼性を向上させる。
【解決手段】測位サーバ10は、移動局が位置するエリアを推定する測位部14と、複数のエリアの各々について移動局の位置が当該エリアであるとの測位結果が得られた場合に伝播誤り補正にて正解とされるエリアおよび当該正解とされる確率を記憶した伝播誤り補正情報記憶部16と、複数回の測位結果に対応する上記正解とされるエリアおよび当該正解とされる確率を読み出し、読み出した正解とされるエリアおよび当該正解とされる確率に基づいて測位結果それぞれに関する信頼度を算出し、上記測位結果それぞれに関する信頼度に基づいて測位結果を補正する測位結果補正部12と、補正後の測位結果を出力する測位結果出力部13と、を備える。
(もっと読む)
距離測定方法、距離測定用受信局装置及び位置測定システム
【課題】屋内のマルチパス環境下においても、高分解能の遅延時間測定を可能とする。
【解決手段】サブキャリアの周波数が同期したマルチキャリア信号を受信局Rで受信し、サブキャリア毎に、コンスタレーションデータ18の位相及び振幅データである周波数領域コンスタレーションデータ26を得、送信局Tからの受信信号を、その伝播パスに応じて、それぞれ振幅Ai、遅延時間Τi、位相Θiが異なる複数の遅延信号の合成遅延信号として表した時、周波数領域コンスタレーションデータ26と、前記遅延信号との残差が少なくなる遅延時間Τiから送信局Tと受信局Rの相対的な距離を求める。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】GPSによる測位と慣性航法による測位とを行う測位装置において、消費電力の
削減を図ること。
【解決手段】カーナビゲーション装置1において、GPS衛星信号の受信状況を示す指標
値が、予め定められた第1低レベル条件を満足するか否かが判定され、満足すると判定さ
れた場合には、慣性航法用センサを起動状態(ON)とし、満足しないと判定された場合
には、慣性航法用センサを停止状態(OFF)とする制御が行われる。また、第1低レベ
ル条件を満足すると判定された場合には、上述した指標値が、第1低レベル条件よりもレ
ベルの低い第2低レベル条件を満足するか否かが判定され、満足すると判定された場合に
は、慣性航法演算処理が行われて慣性航法演算位置が出力位置に決定され、第2低レベル
条件を満足しないと判定された場合には、GPS受信部20により測位されたGPS測位
位置が出力位置に決定される。
(もっと読む)
測位装置、通信システム及び測位方法
【課題】測位時点での電波環境の影響による伝播遅延の検知誤りに起因した測位誤差を適正に補正し、測位結果の信頼性を向上させる。
【解決手段】測位サーバ10は、移動局が位置するエリアを推定する測位部15と、同一のセクタに属し伝播遅延の異なる複数のエリア間を移動する場合の最短移動時間を記憶したエリア間接続関係記憶部17と、複数回の測位結果として得られる複数のエリアにおいて異なるエリア間を移動する場合の最短移動時間を読み出し、当該異なるエリアが測位された測位時刻の差分が上記の最短移動時間よりも小さい場合に測位結果において伝播遅延の検知誤りがあると判定する誤り判定部12と、当該誤りがあると判定された場合に所定の手法で測位結果を補正する測位結果補正部13と、測位結果を出力する測位結果出力部14と、を備える。
(もっと読む)
位相ずれ算出装置及び測位装置
【課題】測位側のアンテナが建物の傍など障害物の近傍に設置されていても、アンテナで受信した衛星信号のマルチパス誤差分を求め、衛星信号のマルチパス誤差分を除去して、正確な測位ができるようにする。
【解決手段】 マルチパス算出部10は、アンテナ4に対する障害物とアンテナ4との相対位置情報、衛星41の位置情報、及び、障害物の反射率の各情報に基づいて、衛星41の信号の搬送波位相に障害物によるマルチパス雑音により発生したずれを算出する。搬送波位相前処理部11は、単独測位部9で単独測位した衛星41の信号の搬送波位相から、マルチパス算出部10で算出したマルチパス雑音によるずれ分を差し引くことにより当該搬送波位相のずれを除去する。
(もっと読む)
雑音成分除去装置及びプログラム
【課題】簡便な構成で、GPS受信機の搬送波位相測定値に含まれる雑音成分を推定することのできる技術を提供する。
【解決手段】GPS受信機1において測定した搬送波位相測定値に対して雑音成分を除去するための雑音成分除去プログラムにおいて、GPS受信機1で測定した搬送波位相測定値に基づき、2周波数の受信信号に対する幾何距離項を含む第1の線形結合及び電離層遅延項を含む第2の線形結合量を算出する。算出した第1及び第2の線形結合量から、第1及び第2の時間変動成分をそれぞれ抽出する。第1及び第2の時間変動成分を抽出した値に基づき、共分散行列を算出する。算出した共分散行列の成分に基づいた比例係数値σαβ/σααと第2の時間変動成分抽出値とを用いて、第1の線形結合に含まれる測定雑音由来項を推定した値を算出する。
(もっと読む)
車載装置
【課題】周囲環境の変化に影響されることなく、マルチパスの影響を回避した測位を行えるようにする。
【解決手段】車載装置1は、位置サーバ21から受信したアルマナックデータに基づいて複数のGPS衛星19のうち幾つかを受信対象のGPS衛星として決定し、その受信対象として決定した幾つかのGPS衛星19毎に当該GPS衛星19の配置態様と車両の向きと基づいて複数のGPSアンテナ11〜18のうちから受信対象のGPSアンテナを決定し、その受信対象として決定した幾つかのGPS衛星19毎に受信対象として決定したGPSアンテナから入力したGPS衛星信号を合成して当該GPS衛星信号を送信したGPS衛星19との間の疑似距離を算出する。
(もっと読む)
衛星ナビゲーションシステムのインテグリティのリアルタイム監視用の装置および方法
本発明は、衛星ナビゲーションシステムのインテグリティ(11)の表示を推定する手段を提供する計算装置であって、ナビゲーションシステムによって計算されたデータを測定することによって、非常に低確率のロケーションエラーに対してシステムのインテグリティ(11)の表示をリアルタイムで推定する手段を含み、これらの手段が
−ロケーションシステムによって計算されたデータを受信する手段、
−ロケーションエラーの分布モデル(H)を推定する手段、
−分布モデル(H)を特徴づけるパラメータを推定する手段、
−非常に低確率のロケーションエラーの分布のモデリングを可能にする分布モデルを特徴づけるパラメータの関数として極値理論を適用する計算手段、
−非常に低確率のロケーションエラーのためにインテグリティ(11)の表示をリアルタイムで推定する手段、
−リアルタイムでインテグリティ(11)の表示を送信する手段
を含むことを特徴とする計算装置に関する。  (もっと読む)
(もっと読む)
無線システム及びその位置特定方法
【課題】少ない基準点でターゲットの位置を特定できる無線システム等を得る。
【解決手段】位置座標が既知の無線端末A1〜A3と、位置座標が未知の無線端末N1と、各無線端末と無線通信して情報を収集するサーバSを設けた無線システムで、無線端末10A、10Bは、無線端末間の距離を測定する距離測定手段11A、11Bと、距離情報を無線通信によってサーバ20へ送信する距離情報送信手段12A、12Bとを有し、サーバ20は、距離情報を収集する距離情報収集手段21と、距離情報、既知の無線端末の座標、及び設定した未知の無線端末の初期座標値から、非線形連立方程式を常微分方程式の初期値問題に帰着させるパラメータの埋め込みによる方法を用いて、未知の無線端末の座標を計算する行列式計算手段22と、未知の無線端末の座標が、既知の無線端末の配置範囲を元に予め決めた境界条件を超えるか否かを判断する境界条件評価手段23とを有する。
(もっと読む)
ナビゲーション装置
【目的】結線ミス等によって正常な信号が得られない可能性がある車速センサ情報が供給されない場合や、もともと車速パルス信号が取得できない車種であっても、測位精度の低下を防止し、また、無用の処理による消費電流の増加を防止したナビゲーション装置を提供する。
【構成】ナビゲーション装置に、位置情報演算処理において車速センサ情報を使用するか否かを設定する車速センサ入力設定手段を備え、車速センサ情報を使用しない旨が設定された場合、GPS受信手段の情報と前記ジャイロセンサの情報とに基づいて位置情報を演算する。
(もっと読む)
位置検出システム
【課題】
マルチホップ無線通信を利用した位置検出システムにおいて、基地局が少数であっても無線端末の位置を高精度に検出する。また、位置検出システム構築時に必要な調整作業を容易にする。
【解決手段】
無線通信管理システム1は、管理装置2と複数の基地局3と無線端末4とから構成される。基地局3は管理装置2から送信される制御情報により、自身の設置高さを柱5などに沿って変更できる機能を有する。無線端末4と基地局3は互いにデータ通信を行い、管理装置に電波強度情報を送信する。管理装置は、各基地局3の設置高さなどを変更しながら、無線端末4と基地局3との間の電波強度情報を収集し、無線端末4の位置を推定する。
(もっと読む)
未知送信局の測位装置及び測位方法
【課題】衛星の軌道誤差の影響による測位精度の劣化を軽減できる未知送信局の測位装置を得る。
【解決手段】2機の人工衛星を介し、未知送信局2と既知リファレンス局1から送信される同一電波信号を受信する電波信号受信部11と、受信電波信号の相関演算を行うことにより、未知送信局2及び既知リファレンス局1からの受信電波信号の到来時間差及びドップラー周波数差を計算するTDOA/FDOA計算部12と、到来時間差、ドップラー周波数差、地球の形状に基づき、未知送信局2の位置を測位する未知送信局測位計算部13と、電波信号受信部11〜未知送信局測位計算部13の一連の測位の処理を繰り返すか否かの決定を行う処理繰返決定部14と、測位の処理を繰り返す場合は、測位結果に距離が最も近いリファレンス局を選択する最短距離リファレンス局選択部16とを設け、選択されたリファレンス局について、上記一連の測位の処理が行われる。
(もっと読む)
車両位置姿勢推測装置
【課題】最終的な計算精度を高めることができる車両位置姿勢推測装置を提供すること。
【解決手段】本発明による車両位置姿勢推測装置1は、車両の加速度を検出する車両挙動検出手段2cと、車両の車輪の車輪速を検出する車輪速検出手段2dと、GPS速度を検出するGPS速度検出手段2eと、車輪のスリップ又はロックが発生しているか否かを判定する判定手段2fと、判定手段2fが車輪のスリップ又はロックが発生していないと判定する場合に、加速度と車輪速に基づいて、車速を計算する計算手段2gを備えるとともに、判定手段2fが車輪のスリップ又はロックが発生していると判定する場合に、計算手段2gが、加速度とGPS速度に基づいて車速を計算することを特徴とする。
(もっと読む)
精度不良を検出するための装置を備えるナビゲーションシステム
【課題】電離層誤差データを用いて、保護限界を精度良く求める。
【解決手段】複数の送信機から複数の信号を受信するように動作可能な受信機を有する車両用のナビゲーションシステムは、プロセッサ16と、メモリデバイス18とを備える。メモリデバイス18は、機械読取り可能命令を格納しており、当該命令は、プロセッサ16によって実行されると、プロセッサ16が、複数の信号から導出される擬似距離測定値に対応する1組の誤差推定値を求めること、電離層遅延データを用いて、主ナビゲーション解の誤差共分散行列を求めること、及び解分離技法を用いて、誤差共分散行列に基づいて、少なくとも1つの保護レベル値を求めることを可能にする。
(もっと読む)
移動体位置算出装置および移動体位置算出装置用のプログラム
【課題】従来よりも簡易なハードウェア構成で、衛星航法による現在位置の算出精度を向上させる。
【解決手段】ナビゲーション装置は、推測航法によってGPS衛星からの受信タイミングにおける推定位置を算出し(ステップ110)、その受信タイミングにおいて複数のGPS衛星から受信した信号に基づく擬似距離データ(ステップ120)を使用して、自車両の現在位置を特定する(ステップ170)。ただし、地図データ中の構造物の立体形状データに基づいて、障害物に遮られるGPS衛星、および、反射波が車両2に到達してしまうGPS衛星を特定する(ステップ140、150、160)。そして、前者のGPS衛星からの信号は現在位置の測定のための利用対象から除外する(ステップ155)。また、後者のGPS衛星についての重みを、他の利用対象のGPS衛星についての重みよりも小さい値にする(ステップ165)。
(もっと読む)
位置検知システム、位置検知サーバおよび端末
【課題】不規則に発生する外乱に対しても位置検知の精度劣化を抑制可能にする。
【解決手段】位置検知サーバは、各無線基地局で取得された相手基地局からの通信状況値により無線基地局間の通信状況を監視し、通信状況値に所定以上の変化を検出した場合には、変化が起こった無線基地局間に外乱が発生したというイベントを発行すると共に、対応する通信状況値の変化量を推定し、端末が外乱発生直前の位置で取得した無線基地局からの通信状況値と今回取得した通信状況値との差に基づいて、外乱が今回の位置検知に影響を及ぼすかを判断し、影響すると判断された場合には、先に推定した変化量を用いて端末で取得した外乱に関連している無線基地局からの通信状況値を補正し、この補正通信状況値と外乱に関連していなかった無線基地局からの通信状況値を用いて端末の位置を推定する。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】現実的な移動体の移動を想定した適切な誤差推定を実現する測位方法等を提供す
ること。
【解決手段】慣性航法演算処理により随時求められる相対高度である第1高度変化「Δh
i」と、移動体である自動車の外気圧を検出する気圧センサの検出結果に基づいて算出さ
れる相対高度である第2高度変化「Δhb」との差「δh=Δhi−Δhb」が算出される
。そして、算出された高度変化の差「δh」、慣性航法演算処理により求められる自動車
の直進方向に対する左右方向の速度「vix」、及び、慣性航法演算処理により求められる
自動車の高度方向の速度「viz」に応じた観測値を用いたカルマンフィルタ処理が行われ
て、慣性航法演算処理の演算結果「(pi,vi,Ai)」に含まれる誤差「(δp,δv
,ε)」が推定され、推定された誤差を用いて慣性航法演算処理の演算結果が補正されて
、自動車の現在位置が測位される。
(もっと読む)
伝搬遅延時間測定装置及びレーダ装置
【課題】受信信号の周波数オフセットが発生している場合でも、アレーアンテナを構成することなく、高い推定精度で伝搬遅延時間及び周波数オフセットを測定することができるようにする。
【解決手段】フーリエ変換部6のフーリエ変換結果をフーリエ変換部8のフーリエ変換結果で除算するフーリエ変換結果除算部9を設け、2次元高分解能部10がフーリエ変換結果除算部9の除算結果である2次元アレーデータから所望の直接波に近接しているマルチパス波を分離して、所望の直接波の遅延時間τ1及び周波数オフセットfD1を算出する。
(もっと読む)
281 - 300 / 843
[ Back to top ]