
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
361 - 380 / 843
移動局測位システム
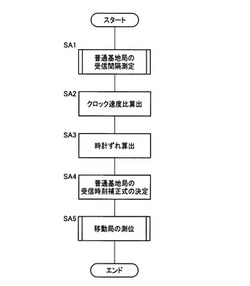
【課題】システムに要求される測位精度と、前記拡散符号列の受信間隔の検出精度に応じて基地局どうしのクロック速度比検出の分解能を決定することのできる移動局測位システムおよび移動局測位方法を提供する。
【解決手段】受信間隔算出部82(SA1)により、基準基地局が符号数(符号間隔)を決定して1回発信し各普通基地局が受信した拡散符号列における2つの拡散符号の受信間隔が算出され、クロック速度比算出部54(SA2)により各普通基地局と基準基地局とのクロック速度比が算出され、時計ずれ算出部56(SA3)により基準基地局の時計に対する各普通基地局の時計の時刻ずれが算出され、受信時刻補正部58(SA4)により、各普通基地局における移動局からの電波の受信時刻が基準基地局の時計を基準とする時刻に補正され、測位部60(SA5)により補正された受信時刻を用いた移動局の測位が行われる。
(もっと読む)
時刻修正装置、時刻修正装置付き計時装置及び時刻修正方法

【課題】受信した時刻情報を使用しつつ、伝搬遅延時間の少ない正確な時刻修正を行うことができる時刻修正装置等を提供すること。
【解決手段】受信部24が、受信した複数の基地局から選択された候補基地局15a等から発信される特定信号の時刻情報に基づいて修正時刻情報52を生成する修正時刻生成部35を有し、修正時刻情報判断部38が修正時刻情報52と表示時刻情報53を比較した判断結果に基づいて、時刻表示修正部36は、修正時刻情報52に基づいて表示時刻情報53を修正することを特徴とする時刻修正装置10。
(もっと読む)
移動局測位システム
【課題】構成が簡素な基地局および移動局を有し、精度のよい移動局測位システムを提供する。
【解決手段】干渉パラメータ設定部74により、基準基地局の送信波制御パラメータを固定するとともに、可変基地局の送信波制御パラメータが時刻の経過に伴って所定の変化をされ、ヌルポイント線位置算出部80により、干渉パラメータ設定部74において設定されたパラメータに応じた搬送波を基準基地局および可変基地局が送信することにより、基準基地局および可変基地局により送信された電波が互いに弱め合う位置であるヌルポイントの連なりであるヌルポイント線の位置が、最小受信強度測定時刻における送信波制御パラメータの内容に基づいて算出させられ、測位部78により、2以上の前記基地局組に対してヌルポイント線算出部80によりそれぞれ得られる複数のヌルポイント線の交点が算出され、該交点に基づいて前記移動局10の位置が算出される。
(もっと読む)
移動局測位システム
【課題】測位対象との距離を測定可能な基地局の数を減らすことにより測位システム全体に要する費用を低減しつつ、測位の精度を維持可能な移動局測位システムを提供する。
【解決手段】移動局位置候補算出部102により、2つの基地局12の受信時刻検出部46において検出された移動局10からの電波の受信時刻に基づいて、該2つの基地局12のそれぞれと前記移動局10との間の電波の伝搬時間を算出し、該算出された伝搬時間および前記2つの基地局12の位置に基づいて前記移動局10の位置の複数の候補が算出され、前記移動局位置候補選択部104により、該移動局位置候補算出部102によって算出された前記移動局10の位置の複数の候補のうち、実際の移動局10の位置であると判断される候補が選択され前記移動局10の位置とされるので、少なくとも2つの基地局12が存在すれば移動局10の位置の算出(測位)を行なうことができる。
(もっと読む)
移動局測位システム
【課題】基地局における省電力化と測位精度の保持の両立が可能な移動局測位システムを提供する。
【解決手段】移動局10から発信された電波を受信する基地局12において、複数の基地局12のそれぞれと移動局10との距離に関連する距離関連値(RSSI値)を算出する第1の測距手段(RSSI取得部46)と、第1の測距手段とは異なる方法で、前記複数の基地局のそれぞれと前記移動局との距離に関連する距離関連値(電波の受信時刻)を算出する第2の測距手段(受信時刻測定部42)と、複数の基地局12のそれぞれについて、基地局12と移動局10との距離に関する情報(RSSI値の切換判断値)に基づいて、前記第1の測距手段と第2の測距手段とを切り換える測距手段切換手段(判定部50)とを有する。
(もっと読む)
携帯装置及びプログラム
【課題】次案内地点への到達時間を予測し、予測時間を基準としてGPS測位部を動作させることでGPS測位部の動作回数を逓減し、バッテリの持続時間を向上させる。
【解決手段】目的地までの経路を案内する機能を有する携帯装置において、GPS測位部(2)と、経路案内を行うナビゲーション処理部(41a)と、GPS測位部を制御する制御部(41b)とを備え、前記制御部は、ナビゲーション処理部の経路情報とGPS位置情報とから次案内地点への到達時間を予測し、予測結果に基づいてGPS測位部の駆動タイミングを制御する。
(もっと読む)
無線位置決定システムにおける時間取得
【課題】無線装置のGPS信号取得時間を低減する。
【解決手段】無線装置は、基準信号を受信し、受信した基準信号の断片を抽出し、断片のための受信の時刻を決定し、断片と受信の時刻を、GPS補助情報のための要求の一部として位置決定エンティティに送信する。位置決定エンティティは、受信の関連する時刻とともに基準信号を連続的に受信し記憶し、および無線装置から送られた断片とタイムスタンプを受信する。位置決定エンティティは、さらに、信号断片を記憶された基準信号の一部にマッチさせ、タイムスタンプと、記憶された基準信号のマッチした部分の受信の時刻との間のタイムオフセットを決定し、無線装置のための補助情報を作成し、タイムオフセットを用いて補助情報を無線装置に同期させ、同期された補助情報を無線装置に送信する。無線装置は、受信したタイミング情報を含む補助情報で、GPS信号を取得する。
(もっと読む)
ナビゲーション装置
【課題】加速度センサのオフセット誤差を補正することができ、それにより加速度センサを用いた測位を精度良く行うことが可能なナビゲーション装置を提供する。
【解決手段】GPS部11より求められた位置PGPSおよび速度VGPSと、加速度センサ12および磁気センサ13により求められた位置PINSおよび速度VINSと、に基づいて現在の最も確からしい位置に関する最良値δPを推定する最良値推定部102と、推定された最良値δPに基づき、位置PINSの誤差が加速度センサ12のオフセット誤差に起因したものであるとして該オフセット誤差の分だけ加速度を補正するための加速度オフセット値を算出する加速度オフセット算出部104手段と、を備える。
(もっと読む)
携帯端末、基地局及び携帯端末の位置検出方法
【課題】信号が伝播する環境に応じて他の信号の通信可能距離を算出することによって従来より高精度に位置を検出することが出来きる携帯端末、基地局及び携帯端末の位置検出方法を提供することを目的とする。
【解決手段】3つ以上の基地局と所定の変調方式で変調した信号を送受信する通信部と、前記信号の伝播環境を示す伝播モデルを前記基地局の組み合わせ毎に複数記憶すると共に前記基地局の位置情報を記憶する記憶部と、前記通信部及び前記記憶部を制御する制御部と、を具備し、前記制御部は、前記信号に基づいて前記基地局の組み合わせに対応する伝播モデルを特定すると共に当該伝播モデルに基づいて前記信号の通信可能距離を算出し、当該通信可能距離を半径とすると共に各基地局の位置を中心とする円をそれぞれ算出して各円が重なる重畳エリアを求め、前記重畳エリアの中心位置を携帯端末の位置として検出する。
(もっと読む)
測位システム
【課題】1つの線形回帰方程式を用いて容易に且つ高精度に電離層遅延を推定演算する。
【解決手段】基地局1は、測位衛星SATからの測位用信号を受信して、キャリア位相積算値およびコード疑似距離を取得する(S1)。基地局1は、航法メッセージを取得、解析して、電離層遅延の推定演算に利用する測位衛星の情報を取得する(S2,S3)。基地局1は、基地局1と測位衛星との距離に関して、過去の推定演算により得られた測位衛星位置の周りでテイラー展開することで線形近似を行う(S4)。基地局1は、測位衛星位置に関する線形近似の結果を行列演算要素とし、電離層遅延を未知数として含み、キャリア位相積算値およびコード疑似距離と基地局位置とから算出される値を観測値として、線形回帰方程式を設定する。基地局1は、この線形回帰方程式にカルマンフィルタ等を適用して、電離層遅延を推定演算する(S5)。
(もっと読む)
移動量計測装置及び位置計測装置
【課題】簡易な構成で、ロバスト性を確保して、移動体の移動量を精度よく計測することができるようにする。
【解決手段】GPSから、第1時刻及び第2時刻の各々で測定された測位位置と、第1時刻及び第2時刻の各々における受信信号の衛星番号群とを取得し(140)、第1時刻における衛星番号群と、第2時刻における衛星番号群とが同一である場合には(144)、第1時刻及び第2時刻で測定された測位位置の変化に基づいて、自車両の車速を算出する(146)。第1時刻と第2時刻とにおいて受信信号の衛星番号群が同一でない場合には(144)、過去の衛星番号群から、第2時刻における衛星番号群と同一の衛星番号群である時刻を検索し(148)、検索された時刻に測定された測位位置と、第2時刻における測位位置とに基づいて、自車両の車速を算出する(152)。
(もっと読む)
移動端末装置、及び移動距離算出方法
【課題】現在位置を測位することのできる装置において、移動距離を正確に測定することができるようにする装置及び方法を提供すること。
【解決手段】現在位置を測位するGPS受信手段12を備えた移動端末装置において、GPS受信手段12が測位した測位点を測位された順に所定条件で特定して処理対象地点とし、該処理対象地点が所定数に達する毎に該所定数の処理対象地点の重心を順次算出して経路履歴を示す経路履歴点とする重心算出手段13と、経路履歴点を順に結んだ経路から移動距離を算出する移動距離算出手段14と、を備え、重心算出手段13は、所定条件として、測位された順に測位点から次の測位点の距離を算出し、距離が所定距離だけ離れていない場合にはさらに次の測位点までの距離を算出し、距離が所定距離だけ離れている測位点を順次処理対象地点とすることを特徴とする。
(もっと読む)
位置検出システム
【課題】移動体側のアンテナが,複数の無線タグと通信しうる距離関係になった場合にも,上記移動体と無線タグとの相対位置を検知出来るようにした位置検出システムを提供すること。
【解決手段】前記複数の無線タグに対して相対的に移動する移動体に搭載され,各無線タグから発信された前記固有の識別情報を含む電波信号を受信する複数のアンテナを備えており,前記通信手段から上記電波信号発信手段への前記通信要求を含む電波信号の送信電力を変化させることによって,1つの電波信号発信手段と上記アンテナとの間で通信可能な限界の送信電力を検出し,検出された1つの電波信号発信手段と各々のアンテナとの間で通信可能な限界の送信電力から演算される各々のアンテナと上記1つの電波信号発信手段との距離の比率から前記アンテナと前記電波信号発信手段との相対位置を検出する位置検出システム。
(もっと読む)
測位装置、測位システム、コンピュータプログラム及び測位方法
【課題】アンビギュイティの算出を高速化し、都市部などにおけるRTKの測位が可能な時間を大幅に増加させることができる測位装置、測位システム、コンピュータプログラム及び測位方法を提供する。
【解決手段】測位装置10は、衛星からの搬送波位相及び擬似距離を測定し、アンビギュイティの初期値を算出し、算出した初期値を用いて解の候補を推定する。測位装置10は、自身の概略の水平位置(緯度、経度)とその水平位置での道路の高度情報により測位装置10の高さ位置(より正確には衛星信号の受信用アンテナの高さ位置)の範囲を設定し、各衛星からの搬送波位相が等しい等位相の多数の交点(解の候補)の中から、設定した範囲内にある解の候補に限定した上で真の解であるか否かの検定を行う。
(もっと読む)
飛翔体に備えられる位置情報検出装置
【課題】山岳や海上など、携帯電話端末等の携帯端末が通常の通信のできない圏外域において、当該携帯端末の位置を検出することを可能とする飛翔体に備えられる位置情報検出装置を提供する。
【解決手段】飛翔体1の位置情報検出装置2aにおいて、電波受信部2−1は、携帯電話端末から送信される電波を受信する。固有情報検出部2−2は、受信した電波に含まれる固有情報、例えば、電話番号を読み出す。携帯電話端末位置情報検出部2−3は、受信した電波に基づいて、携帯電話端末の位置情報を検出する。通信部2−5は、電話番号と、位置情報とを送信する。
(もっと読む)
衛星航法システムにおける電離層遅延量の補正方法及びその装置。
【課題】静止衛星型衛星航法システム(SBAS)における電離層遅延量の推定値に関する信頼区間を短縮する。
【解決手段】航法衛星からの測位信号により電離層遅延量及びその他の補正情報を作成するための複数のモニタ局を既知点に配置し、このモニタ局以外の地点に、航法衛星からの測位信号をそれぞれ受信してそれぞれ電離層遅延量を測定するための複数のGPS受信機を配置し、互いに隣接して四角形を形成する4つのIGPにおいて、航法衛星からの測位信号を受信して電離層遅延量をそれぞれ求め、4つのIGPに囲まれる領域内の地点における電離層遅延量を表す平面をそれぞれ求め、GPS受信機により測定された電離層遅延量の測定値を、それぞれGPS受信機毎に求め、4つのIGPに囲まれる領域内の地点の電離層遅延量に関する平面と、GPS受信機毎に求めた測定値との差の最大値を、電離層遅延量の推定値に関する信頼区間の補正情報とする。
(もっと読む)
ナビゲーション装置
【課題】ナビゲーション装置において、進行方向と地磁気センサの向きとのズレを補正して精度良く位置を求める。
【解決手段】GPS部11および磁気センサ12による計測結果に基づいて進行方向φと磁気センサ12が向いている方位θとの差分を求め、該求めた差分によって磁気センサ12により求めた方位θの補正を行う方位補正部101と、補正後の方位θ’とGPS部11による過去の計測結果である位置PGPSおよび速度Vとに基づいて現在の位置PMAGを算出する位置算出部102と、を備える。
(もっと読む)
移動局位置推定方法および移動局測位システム
【課題】移動局の位置を正確に算出することのできる移動局位置推定方法および移動局測位システムを提供する。
【解決手段】基準基地局選択部104(SA9)により、移動局10と複数の基地局12のそれぞれとの間における無線通信の信頼性を表す複数種類の指標と移動局10の位置の履歴情報との少なくとも1つに基づいて、各基地局12の電波の受信時刻の時間差の算出の基準となる基準基地局が選択され、受信時間差算出部106(SA10)により、基準基地局で受信した電波の受信時刻と他の基地局のそれぞれが受信した電波の受信時刻とに基づいて前記時間差が算出され、測位部56(SA11、12)により、前記時間差と基地局の位置とに基づいて移動局10の位置が推定されるので、測位誤差の少ない移動局10の測位が可能となるとともに、シャドウィングやマルチパスが測位精度に与える影響を抑えることができる。
(もっと読む)
雑音検出装置及び測位装置
【課題】衛星信号の搬送波位相を利用して測位するときに、各受信機で独立し、さらに各衛星で独立して、受信した信号に含まれるマルチパス雑音とサイクルスリップを検出できるようにする。
【解決手段】マルチパス強度等計算部15では、ある時刻及び別の時刻におけるL1信号及びL2信号にそれぞれ当該信号の波長を乗算する。そして、その乗算後のそれぞれの値について、当該ある時刻の値と別の時刻の値との差を求める。次に、この求めたL1信号の差信号とL2信号の差信号との差を求める。そして、この値の絶対値や二乗値を所定の基準値と比較する。
(もっと読む)
センサネットワーク用減衰定数推定システム、ノード位置推定システム、推定方法、及びそのプログラム
【課題】固定ノードで受信した受信電界強度情報を利用して減衰定数αを推定するシステム及びこれを利用して移動ノード位置を推定する位置推定システム等を提供すること。
【解決手段】センサネットワーク領域内の移動ノード30からの信号を受信しその受信電界強度Pi を測定する複数の固定ノード20と、この測定した受信電界強度Pi を収集しこれに基づいて移動ノード30の位置を推定するノード位置推定装置40とを備え、該ノード位置推定装置40を、受信電界強度Pi より移動ノード30の三次元の仮位置を仮特定する仮位置特定手段81と、この移動ノード30の仮位置に基づいて各固定ノード20との間の距離di にかかる総和の関数Dを求める距離関数算定手段82と、前記受信電界強度Pi の総和及び前記関数Dに基づいて当該移動ノード30の位置環境にかかる電波伝搬の減衰定数αを通信毎に演算し算定する減衰定数演算手段83とで構成した。
(もっと読む)
361 - 380 / 843
[ Back to top ]