
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
421 - 440 / 843
GPS受信装置
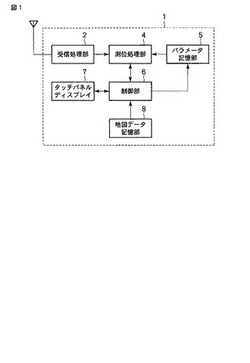
【課題】市街地での測位精度を容易に改善する。
【解決手段】GPS受信装置は、複数の衛星からの電波を受信しこれら電波に含まれる測位用情報を取得する受信処理部3と、複数の衛星の一部を選択するパラメータを記憶するパラメータ記憶部5と、受信処理部3によって取得された測位用情報に基いて複数の衛星から受信地点までの擬似距離を計算し、パラメータに従って選択された一部の衛星について得られる計算結果から受信地点の位置を測位する測位処理部4と、既知の受信地点の位置を入力するタッチパネルディスプレイ7とを備える。この受信装置は、既知の受信地点の位置がタッチパネルディスプレイ7によって入力されたときに、複数の衛星から既知の受信地点までの真の距離を計算し、この真の距離に対する擬似距離の誤差が少ない順に優先される衛星の仰角値および方位角値に基いて測位に適した仰角および方位角の範囲を決定し、これら範囲をパラメータとしてパラメータ記憶部5に設定する制御部5を備える。
(もっと読む)
マルチパス検出装置、測位装置、姿勢方位標定装置、マルチパス検出方法およびマルチパス検出プログラム

【課題】マルチパスの影響が無い搬送波の観測情報に基づいて高精度に位置および姿勢角を標定することを目的とする。
【解決手段】位相差算出部130は各GPS衛星と各GPSアンテナ951との距離を搬送波の数で示す各搬送波位相に基づいて各GPS衛星からの搬送波についてGPSアンテナ951間の搬送波位相の一重差または二重差を算出する。LOSベクトル算出部140は航法メッセージと単独測位結果とに基づいて各GPS衛星に対するLOSベクトルを算出する。基線長算出部150は搬送波位相の一重差または二重差とLOSベクトルとに基づいてGPSアンテナ951間の基線長を算出する。マルチパス判定部160は算出した観測基線長を既知基線長と比較して観測基線長の算出に用いられた各搬送波にマルチパス波が含まれているか判定する。位置姿勢方位標定部120はマルチパス波でない搬送波の観測情報に基づいて位置姿勢を標定する。
(もっと読む)
位置情報処理装置
【課題】組織的な分析等に対して、対象者の移動特性に矛盾する位置情報が与える影響を極力回避することが可能な位置情報処理装置を提供する。
【解決手段】位置情報処理装置200は、対象者の位置の変化を示す位置情報を取得する位置情報取得ユニット21と、対象者の移動特性に関するデータに基づいて、位置情報取得ユニット21で所定時間内に取得された位置情報の誤測位を検出する誤測位検出ユニット22と、を備えているので、誤測位検出ユニット22における検出結果を利用することにより、組織的な分析等に対して、対象者の移動特性に矛盾する位置情報が与える影響を極力回避することが可能となる。
(もっと読む)
位置推定システム及び無線通信端末並びに位置推定装置
【課題】近距離通信機能を用いた簡単なシステム構成によって、高精度の位置推定を実現する。
【解決手段】所定エリア内に複数の基準局110や接続局120が設置される。所定エリア内を移動する移動無線機は近距離無線通信機能を有しており、別の移動無線機又は基準局とすれ違うたびに相手装置の機器IDを受信して交差履歴データとして蓄積する。また、位置推定装置150にアクセス可能な接続局と通信できる位置に移動すると、蓄積した交差履歴データを位置推定装置にアップロードする。移動無線機からアップロードされた交差履歴データは交差履歴データベース155に格納される。位置推定装置は全基準局の設置位置を把握しており、位置推定対象の移動無線機から直接アップロードされた交差履歴データや、別の移動無線機の交差履歴データに含まれている位置推定対象の移動無線機との交差履歴に基づいて、位置推定対象の移動無線機の移動経路を推定する。
(もっと読む)
軌道推定装置および軌道推定方法
【課題】軌道推定精度の向上、および局所解への収束頻度の低減を図ることのできる軌道推定装置を得る。
【解決手段】複数の移動体を介して得られる同一電波の到来時間差およびドップラー周波数差を第1の情報として入力し、軌道決定パラメータおよび第1の情報を含む評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定する収束演算部30と、収束演算部30で収束演算されることにより推定された軌道決定パラメータの解が、所定の収束条件判定式を満たす場合には、軌道決定パラメータの解を最適解と判定する収束判定部40とを備えた軌道推定装置において、収束演算部30は、複数の移動体の角度観測情報を第2の情報としてさらに入力し、軌道決定パラメータおよび第1の情報に加え第2の情報も加味した評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定する。
(もっと読む)
測位用タグ及びその随伴先物品の測位方法及びシステム
【課題】大型で高価になりがちなUWB(超広帯域)センサを多数使用する必要をなくす。
【解決手段】UWBタグから発せられた信号を移動体600上に搭載した可動型のUWBセンサによって検知する可動検知器網を形成する。センサ側では複数個のタグから信号を検知して自分の位置(及び向き)を求め、求めた位置(及び向き)を基準に他の1個又は複数個のタグを測位して、その結果を出力する。移動体600上には、例えばタグからのAOA(信号到来角)を検知するセンサを一対搭載し、各センサで得られるAOAデータ(α1,β1),(α2,β2)に基づき基準座標系設定及び測位計算を行う。更に、各タグに対する測位計算結果に基づき、そのタグが随伴している物品の寸法、位置又はその双方を求める。
(もっと読む)
移動体用測位装置
【課題】ドップラ周波数の計測値のバイアス成分の影響を適切に除去して測位精度を高めること。
【解決手段】本発明は、移動体に搭載される移動体用測位装置において、衛星からの搬送波のドップラ周波数の計測値に含まれるバイアス成分を推定するバイアス算出部206と、前記バイアス算出部206から得られるバイアス成分の推定値と、前記ドップラ周波数の計測値とに基づいて、衛星と移動体との間の距離を算出する衛星−車両間距離算出部212と、前記衛星−車両間距離算出部212により算出される衛星移動体間距離に基づいて、移動体の位置を測位する測位演算部214とを備えることを特徴とする。
(もっと読む)
位置推定システム及びプログラム
【課題】ターゲットの発射する電波強度を複数のノードが計測してターゲットの位置を推定する位置推定システムにおいて、遮蔽物や反射物などのいわゆるシャドウイングの影響を受けた環境でも位置推定精度が高く、かつ演算量が少なくて処理速度が速い位置推定システム及びプログラムを提供すること。
【解決手段】すべてのノードの中の3個のノードの組合せである基本セットのすべてについての推定位置及び誤差に基づいてLOS(Line of sight)ノードを決定して、そのLOSノードを用いてすべての位置における誤差を計算することでターゲットの位置を推定する。
(もっと読む)
測位方法、プログラム、記憶媒体、測位装置及び電子機器
【課題】各衛星組の現在位置候補に対する評価を受信環境に応じて適切に行うこと。
【解決手段】各衛星組の現在位置候補Pの高度のうち、最大値(最高高度)と最小値(最低高度)との差(測位高度差)が所定の閾値(例えば、200[m])を超えるならば、受信環境を「マルチパス環境」と判断し、超えないならば「オープンスカイ環境」と判断する。そして、受信環境がオープンスカイ環境の場合には、各衛星組の評価点Eを、衛星数やPDOP値等に基づく公知の評価方法により算出する。マルチパス環境の場合には、各衛星組の評価点Eを、オープンスカイ環境の場合と同様に算出し、更に、この評価点Eを、高度テーブルから取得した前回の測位位置に対応する高度と当該衛星組の現在位置候補の高度との差(高度差)に応じた変更量ΔEだけ減少させる。
(もっと読む)
通信システム、車載機及び路側機
【課題】移動する自車の走行位置を精度良く特定することができる通信システム、車載機及び路側機を提供する。
【解決手段】車載機20は、自車が光ビーコン10との通信領域Rに進入したと判定した場合、測位用の信号を路側機30へ送信する。路側機30は、各受信部31、32、33で測位用の信号を受信し、受信した信号の到達時間差を算出する。路側機30は、予め記憶してある各受信部31、32、33の位置及び算出した到達時間差に基づいて、車載機20の位置情報を算出し、算出した位置情報を測位結果として車載機20へ送信する。車載機20は、測位用の信号を送信した時点から測位結果である自車の位置情報を受信するまでの間の自車の走行距離、走行方位などに基づいて、測位結果を補正して自車位置を特定する。
(もっと読む)
位置検出システム
【課題】位置検出精度の高い位置検出システムを提供する。
【解決手段】無線LANを用いたシステムにおいて位置が既知(真の位置)のリファレンス端末106を位置検出エリアに固定して設置し、位置を検出すべき移動端末107とリファレンス端末106の位置を、サーバ105は基地局102、103および104を介しTDOA方式を用いて同時に検出する。そして、リファレンス端末106の位置検出結果と真の位置との差分を用いて移動端末107の位置検出結果を補正する。
(もっと読む)
現在位置測位方法、プログラム、記憶媒体、測位装置及び電子機器
【課題】複数の衛星組のうちから、測位精度が良い衛星組を適切に判断し選択可能とすること。
【解決手段】各衛星組の現在位置候補に対する評価点Eを、当該衛星組の帰納的残差APR(APR値)、PDOP値及び衛星数を基に次式に従って算出する。
E=k1・f1(APR)+k2・f2(PDOP)+k3・f3(衛星数)
このとき、評価関数f1〜f3それぞれを重み付ける評価係数k1〜k3を、APR平均値に基づいて決定する。
(もっと読む)
現在位置測位方法、プログラム、記憶媒体、測位装置及び電子機器
【課題】1回の測位において複数の衛星組それぞれについて測位演算を行う場合に、測位位置の算出に要する演算量を短縮すること。
【解決手段】各衛星組について推定現在位置を算出する推定演算を2回行い、2回目の推定演算による推定現在位置を当該衛星組についての現在位置候補とする。このとき、1つ目の衛星組については、1回目の推定演算では、算出した各GPS衛星の衛星位置及び推定擬似距離をキャッシュに保存し、2回目の推定演算では、各GPS衛星の衛星位置をキャッシュから読み出して取得する。2つ目以降の衛星組については、1回目の推定演算では、各GPS衛星の衛星位置及び推定擬似距離をキャッシュから読み出して取得し、キャッシュに保存されていないGPS衛星については、算出して取得するとともにキャッシュに保存し、2回目の推定演算では、各GPS衛星の衛星位置をキャッシュから読み出して取得する。
(もっと読む)
測位システムおよびそれに用いられる受信端末機
【課題】測位作業の効率を高めることができる測位システムを提供する。
【解決手段】受信端末機11が取得した測位データを演算処理機14で解析して測位対象点Sの測位を行う測位システム10である。演算処理機14は、測位データを受信すると、当該受信前に格納部22に格納されている解析用データDaに受信した測位データを累積して新たな解析用データDaとして格納し直して解析した結果を受信端末機11に送信する構成とされ、受信端末機11は、所定時間ti分となった測位データを演算処理機14に送信するとともに継続して測位データを取得し、解析用データDaの解析結果を受信すると、解析結果の良否を判断し、否の場合、測位データを最後に送信した時点からの測位データが所定時間ti分となると、これを演算処理機14に送信するとともに継続して測位データを取得し、良の場合、測位対象点Sの測位を終了する構成とされている。
(もっと読む)
衛星位置決め基準システムおよび方法
【課題】衛星位置決め基準システムおよび方法
【解決手段】特定のSPS基準受信機が見える所のSPS衛星から受信された衛星位置推算用データ。複数のディジタル処理システムは、通信ネットワークを介して送信される衛星位置推算用データを受信するために通信ネットワークに結合される。ディジタル処理システムは、擬似距離をSPS移動受信機から受信し、SPS移動受信機の位置情報を擬似距離データの表示および通信ネットワークから受信された衛星位置推算用データから計算する。ディジタル処理システムは、通信ネットワークから擬似距離補正値も受信し、擬似距離データの表示を行うように擬似距離データを補正するためにこれらの補正値を使用する。本発明のこの例の一実施形態では、移動SPS受信機は通信するように結合される。
(もっと読む)
初回測位出力位置演算決定方法、プログラム、記憶媒体、測位装置及び電子機器
【課題】初回の測位結果の出力の際に、測位精度の向上とTTFFの短縮とのどちらを優先させるかを、受信環境に応じて適切に判断すること。
【解決手段】初回の測位では、捕捉されたGPS衛星信号を基に現在位置を算出する測位処理(ステップA3)を複数回繰り返し実行する。測位処理の実行毎に、算出した今回の測位位置と前回の測位位置との差(位置差分)ΔPが、連続して所定値以下である回数を位置カウンタで計数するとともに、今回の時刻誤差と前回の時刻誤差との差(時刻差分)ΔTが、連続して所定値以下である回数を時刻カウンタで計数する(ステップA5)。また、APR平均値に応じた変更量で基準閾値を変更することで、位置閾値及び時刻閾値を決定する(ステップA7)。そして、位置カウント値が位置閾値に達し(ステップA9:YES)、且つ時刻カウント値が時刻閾値に達したならば(ステップA11:YES)、今回の測位位置を初回の測位位置として決定し出力する(ステップA13)。
(もっと読む)
GPS受信データの処理装置、処理方法及びプログラム
【課題】高架道路下などでGPS受信情報の測位遅れが発生した場合、その区間での速度は見かけ上遅くなり、次の区間での速度が見かけ上速くなる。すなわち、位置・時刻のデータに基づき算出した移動体の速度が、当該移動体の当該時刻前後の速度傾向に比べて離れてくる。
【解決手段】算出した速度を当該移動体の速度傾向に合わせるように前記移動体の位置・時刻のデータの時間ずれ補正を行うことにより、測位遅れを補正する。この補正データに基づき、移動体の速度、加速度などを算出する。
(もっと読む)
測位システム、移動通信端末、測位方法、測位サーバ、測位用ICチップ、及び測位プログラム
【課題】移動通信端末が送信又は受信する電波にマルチパスによる遅延が生じた場合であっても、移動通信端末の測位をより正確に行うことができるようにする。
【解決手段】本発明の測位システム1は、セルラ端末10の位置を測位するシステムである。送受信部21がセルラ端末10から電波を受信する。伝搬時間算出部22が、受信された電波に関する伝搬時間を算出する。位置算出部31が、算出された伝搬時間と当該算出された伝搬時間におけるマルチパスによる伝搬遅延分を補正するための補正値とに基づいて、セルラ端末10の位置を算出する。よって、受信した電波がマルチパスによる遅延が生じた遅延波であっても、その伝搬遅延分を補正するので、より正確にセルラ端末10の測位を行うことができる。
(もっと読む)
測位装置、測位装置の制御方法、その制御プログラム及び記録媒体
【課題】信号強度が微弱な弱電界下において、測位基礎符号の位相の精度を検証したうえで、精度良く測位することができる測位装置等を提供すること。
【解決手段】発信源からの測位基礎符号を受信して現在位置を測位する測位装置20であって、測位装置20が発生するレプリカ測位基礎符号と測位基礎符号との相関処理を行って測位基礎符号の位相を算出する位相算出手段と、前回測位時の位相と、測位基礎符号を乗せた電波の周波数のドップラー偏移と、前回測位時からの経過時間に基づいて、現在の位相を予測して予測位相を算出する予測位相算出手段と、現在の位相と予測位相との位相差が予め規定した位相差許容範囲内か否かを判断する位相差評価手段と、位相差許容範囲内の位相を使用して、現在位置を測位する測位手段と、を有する。
(もっと読む)
無線ナビゲーション信号を処理する方法
【課題】未処理コードおよび位相の測定からスタートし、(地上のまたは軌道内の)受信機によって行われる微分されていない測定値の位相の不確定性を解くこと
【解決手段】衛星コンステレーションのうちの衛星の各々は、別々の周波数にて、第1無線ナビゲーション信号および第2無線ナビゲーション信号を送信する。衛星を見ることができる基準ネットワークのうちの各局は、衛星から発信された2つの信号の各々に対するコードおよび位相の非微分測定を実行し、これらの測定値から、ワイドレーンの不確定性の未処理値を推定する。この未処理値に基づき、ネットワークにおいて、衛星の内部遅延およびワイドレーンの不確定性の全値を決定する。この方法は、前記基準受信機のレベルにおいて、前記第1および第2無線ナビゲーション信号を受信するステップと、前記基準受信機により、前記第1および第2の受信された信号の各々に対し、非微分コード測定および非微分位相測定を実行するステップと、非微分コード測定値および非微分位相測定値から前記ワイドレーンの位相不確定性の未処理値を計算するステップと、前記基準受信機に対する前記未処理値に基づき、ワイドレーンの位相不確定性の整数値と共に衛星内部遅延を固定するステップとを備える。
(もっと読む)
421 - 440 / 843
[ Back to top ]